新一代海底履带式集矿车“鲲龙500”行走性能分析①
2020-11-18 11:35:56李小艳程阳锐
矿冶工程 2020年5期
李小艳, 程阳锐, 郑 皓, 黎 宙
(长沙矿冶研究院有限责任公司 深海矿产资源开发利用技术国家重点实验室,湖南 长沙410012)
开发利用海底矿产资源是提高我国战略资源保障能力的新途径。 海底履带式集矿车与扬矿提升系统的组合被普遍认为是21 世纪最具前景的深海固体矿产商业开采系统。 海底履带式集矿车在深海稀软底质土环境下工作,土体剪切强度极低,具有搅动流体特性。而且采矿车与普通地面车辆在运行环境、控制方式、载荷、车辆构型/尺寸等方面都存在很大差异,因此基于深海稀软底质土的集矿作业车的行走性能分析显得尤为重要。
目前国内外众多学者做了一系列研究。 在深海稀软底质研究方面,文献[1]用几节履带来模拟集矿机的履带行走机构,用膨润土来模拟海底沉积物,得出了剪切强度和剪切位移的曲线关系。 这也为后来的研究奠定了基础。 文献[2]根据我国大洋航次的土工勘探资料,对海底沉积物的类型、土工性质、承载力等方面进行了详细分析研究。 文献[3-4]利用膨润土模拟深海稀软底质,通过试验分析得到了模拟沉积物与履带相互作用的压力⁃沉陷关系和剪应力⁃剪切位移关系。深海矿产资源开发与利用国家重点实验室成功研制了海底原位测试仪,用于测量深海沉积物的力学性质,如
① 收稿日期:2020-04-13
基金项目:湖南省自然科学基金青年基金(2020JJ5564)
作者简介:李小艳(1989-),女,湖北孝感人,硕士,工程师,主要从事水下装备与稀软底质相互作用机理研究。剪切强度和贯入阻力等,该原位测试仪获得了大量海上测量真实数据。
在动力学特性方面,文献[5]利用Recurdyn/LM建立了集矿机系统多体模型,对集矿机行走性能进行动力学仿真分析,重点分析海底水动力对集矿机行驶性能的影响。 文献[6-8]根据海底底质物理力学特性,建立深海稀软底质力学模型,开展了海底底质特殊力学载荷下履带式采矿车多种行走工况动力学仿真,分析与评价其行走性能。 但研究结果都未经过集矿车试验的验证。 本文通过构建海底集矿车“鲲龙500”的多体动力学仿真模型以及海底稀软底质力学模型,实现履带式集矿机在海底特殊稀软底质上的行走工况动力学仿真分析;并利用“鲲龙500”实验室试验验证仿真模型,所建模型可应用于集矿车的设计、性能评价、控制和仿真等方面,并对集矿车等其他移动机器人以及地面车辆在松软土壤中的相互作用力学提供借鉴。
1 稀软底质土力学特性试验
对于履带行走机理及性能分析,文献[9]首次将履土作用沿水平和垂向分解为剪切作用和承载作用,总结出更具普遍意义的土体剪切应力⁃位移经验模型;并对垂向负载、沉陷进行试验研究,得出压载⁃沉陷经验模型。 这两个模型简单且具有普遍性,成为车辆地面力学理论基础。
模拟底质采用钠基膨润土与水混合制成,在实验室搭建长5 m、宽2.5 m、高0.5 m 的试验区域,铺设厚度0.4 m 的模拟底质。
利用两种尺寸滑板测试履带式集矿机与底质相互作用力学特性分解为法向压力⁃压陷特性和水平切应力⁃剪切位移特性[10],滑板尺寸及结构如表1 所示。

表1 滑板尺寸及结构
由于滑板的自身质量相较于外加载荷很小,忽略滑板自身的初始压陷深度(即作为0 沉陷),在围堆上放置一平直钢深,以其下沿作为参照点,测试在不同外载下滑板上表面的位移量,由此得出不同形状滑板在不同外载条件下对应的压陷深度,从而确立法向压力⁃压陷特性之间的关系。
图1 为不同尺寸滑板压陷试验获得的相应压力⁃沉陷试验数据在双对数坐标系统下进行变换的近似直线。
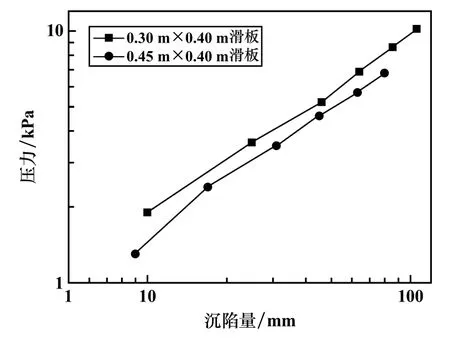
图1 双对数坐标下压陷试验对应直线
根据Bekker 压力⁃沉陷关系式:

式中p为接地压力;kc为土壤内聚变形模量;kφ为摩擦变形模量;b为接触面宽度;z为沉陷量;n为沉陷变形指数。
根据以上理论,通过数据分析可获得海底特定层位底质的压力⁃沉陷关系式为:

2 新一代履带式集矿机多体动力学建模
2.1 集矿机多体动力学建模
多金属结核集矿系统“鲲龙500”是由长沙矿冶研究院研制开发,适应于6 000 m 海深的水力式采集装置、履带式行驶机构的试验装置。 “鲲龙500”由水力式集矿机构、履带行走机构、车体机构、液压系统、着底平衡机构、浮力材料等组成,其主要参数如表2 所示。“鲲龙500”虚拟样机模型见图2。
2.2 水阻力的计算
集矿机具有较大的体积与迎水面积,且海水密度远大于空气密度,因此集矿机海底行走时,需要考虑水动力对其行走性能的影响。
集矿车在海底前进时,所受的水阻力F按下式进行计算:


表2 集矿作业车结构设计参数

图2 “鲲龙500”虚拟样机模型图
式中Cd为阻力系数,取1.0;ρ为水密度,取1 052 kg/m3;V为采矿车行驶速度,m/s;A为迎水面积,取15.6 m2。计算可得,集矿车在设计航速1 m/s 运动时,水阻力可达8 205.6 N。
3 直线行走动力学仿真与试验验证
3.1 直线行走动力学仿真
履带式集矿车行驶工况复杂多变,本文仅以“鲲龙500”实验室试验区域的典型稀软底质地面对履带式集矿车的行走性能进行多体动力学仿真。
直线行走仿真时其目标速度设定为0.7 m/s,采用step 函数定义运动约束,同时监测得到履带式集矿机质心处直线行驶速度。
3.2 实验室试验
为了验证仿真结果的准确性,利用“鲲龙500”进行集矿作业车直线行驶试验进行验证。 给予集矿作业车以一定的控制电压(左6 V,右6 V),使集矿作业车进行水下行驶试验。
3.3 对比分析
图3 为集矿作业车直线行走时其质心处的行驶速度曲线及试验曲线,履带式集矿机在重力作用下陷入深海表层稀软底质土直至趋于稳定。 从2 s 开始驱动轮开始转动直到给定转动角速度,集矿机履带因为存在滑转滑移现象,其速度会在一定值周围波动。 由图可知,仿真试验中履带式集矿机平均速度为0.69 m/s,最大速度为0.74 m/s,最小速度为0.60 m/s,振幅为0.09。 集矿车实验室试验中平均速度为0.72 m/s,最大速度为0.76 m/s,最小速度为0.67 m/s,振幅为0.05,试验结果与仿真结果接近。

图3 履带式集矿机直线行驶速度曲线
通过试验与仿真结果的对比验证了多体动力学的计算准确性与效果。
4 中国五矿C⁃C 矿区行走动力学分析
利用中国五矿C⁃C 矿区的土壤参数,讨论“鲲龙500”在深海土壤与陆地重黏土及深海土壤转弯半径与速度差的关系。
集矿机转向行走仿真时,设置右侧履带的驱动函数为STEP(t,0,0,5,150D),左侧履带的驱动函数为STEP(t,0,0,5,150D)+STEP(t,5,0,6,60D),其中t为时间。 图4 为集矿车分别在海底稀软底质土及陆地典型重黏土上转向行走的仿真曲线。 在深海稀软底质土中,集矿机的转动角速度大,转弯半径小;在重黏土中,集矿机的转动角速度小,转弯半径大。 深海稀软底质土剪切强度小,呈流质状态,因此集矿机侧向转动相比于陆地重黏土受到的剪切力小,因此集矿机在深海的转向半径要小于在重黏土中的转向半径。

图4 集矿机在不同土壤中行走轨迹仿真曲线
图5 是集矿机以不同速度差在深海表层稀软底质土中的转向运动轨迹图。 设置右侧履带的驱动函数为STEP(t,0,0,5,150D)左侧履带的驱动函数为STEP(t,0,0,5,150D)+STEP(t,5,0,6,W),其中t为时间,W分别取60D,90D,120D(分别对应case1,2,3)。 由图5 不难发现,随着速度差逐渐变大,其转弯半径逐渐变小。
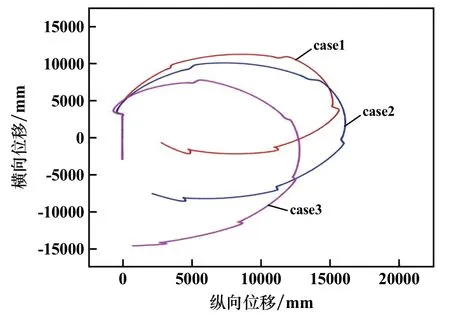
图5 集矿机以不同速度差在稀软底质土上转向时的运动轨迹
5 结 论
1) 基于经典车辆力学的承压模型和剪切模型,结合新型履带式集矿车“鲲龙500”的具体设计方案,根据深海稀软底质土的力学特性参数,建立了稀软底质地面力学模型。
2) 利用多体动力学仿真软件建立了履带式集矿车“鲲龙500”的三维动力学模型,通过履带地面接触建立了履带式集矿车与地面相互作用关系子模型。
3) 对新一代履带式集矿机直线行走性能进行了仿真,并通过“鲲龙500”实验室试验结果与仿真结果进行了对比分析,验证了该模型的准确性。
4) 利用构建的模型对中国五矿深海土壤进行了行走动力学分析。 结果表明,集矿机两侧的速度差越大,集矿机的转弯半径越小;相比于陆地重黏土,集矿机在深海土壤上转弯半径小,转动角速度大。
猜你喜欢
军事文摘(2022年24期)2023-01-05 03:38:22
航空世界(2022年10期)2022-12-08 03:02:28
水生生物学报(2022年6期)2022-07-08 09:31:56
海洋通报(2022年2期)2022-06-30 06:06:28
海洋通报(2021年1期)2021-07-23 01:55:24
作文大王·低年级(2020年2期)2020-03-13 08:10:04
机械管理开发(2020年1期)2020-02-17 04:44:28
小哥白尼(趣味科学)(2019年3期)2019-06-17 11:57:44
幽默大师(2019年5期)2019-05-14 05:39:44
小哥白尼(军事科学)(2018年4期)2018-06-21 06:25:18