
基于MCKD的振动信号压缩感知方法
2020-11-17 01:22何天远郝如江金治彬
石家庄铁道大学学报(自然科学版) 2020年3期
何天远, 郝如江, 金治彬
(石家庄铁道大学 机械工程学院,河北 石家庄 050043)
0 引言
齿轮箱的状态监测和故障诊断,对防止发生突发事故和维持机械设备正常运行具有重大的意义[1]。在齿轮箱故障诊断研究中,很少有对信号采集方面的研究。目前被广泛采用的振动信号采样方法是以采样频率必须大于信号中最高频率2倍的奈奎斯特采样定理为基础的[2]。近年来,随着大型机械设备向综合、高速、连续和网络化趋势发展,如果依然采用基于奈奎斯特采样定理的采集系统采样信号,就会产生较高的采样频率,这样必然产生海量的监测数据[3]。因此,齿轮箱振动监测得到的海量数据面临着难以实时传输和储存速度过慢的问题。近年来出现的压缩感知(Compressed Sensing, CS)采样突破了传统的奈奎斯特采样定理[4]的限制。压缩感知理论通过以远低于奈奎斯特采样速率的频率对信号进行压缩采样并且直接得到信号的压缩表示,不需要经过信号采样和压缩2个单独的过程,即达到了采样和压缩同时进行的目的。最后,利用适当的压缩感知重构算法就可以高概率地重构出原始信号[5]。
针对上述问题,提出了一种基于最大相关峭度解卷积(Maximum Correlated Kurtosis Deconvolution, MCKD)的振动信号压缩感知方法。此方法通过对采集的振动信号进行MCKD预处理,提高信号的稀疏程度,再结合L1范数重构算法对原始信号进行重构,在保证压缩率的前提下有效提高了信号的重构精度。
1 最大相关峭度解卷积原理
Mcdonald et al[6]提出的最大相关峭度解卷积旨在寻找出最优的FIR滤波器—w(l),使故障信号的相关峭度达到最大值,因此可以认为MCKD的本质[7]就是用于提取周期性故障信号中的冲击成分。
MCKD以相关峭度作为评定标准,构造有限冲击响应滤波器f′使周期已知信号通过滤波后相关峭度值达到最大,信号被噪声掩盖的周期冲击成分变得突出[8]。相关峭度是MCKD评定恢复信号x的重要指标,当CKM(T)达到最大值时,是MCKD处理的理想结果。
相关峭度的定义为
(1)
式中,M为位移数;T为冲击信号的周期。
MCKD算法目标函数为
(2)
式中,f′=[f1,f2,…,fL]T是长度为L的滤波器。
为了得到使CKM(T)取得最大值的最优滤波器,令

(3)
式中,k=1,2,…,L。
求得结果以矩阵的形式表达为
(4)

MCKD算法步骤如下:
(1) 确定滤波器的长度L,位移数M和周期T;
(3)yn是滤波后的信号,由计算可得;
(4)αm和β是由信号y解得的;
(5) 更新滤波器系数f′;
(6) 若ΔCKM(T) >ε,则跳到第(3)步进行循环,若ΔCKM(T) <ε,则停止迭代。ε是较小正数,作用是控制迭代终止。
2 压缩感知原理
压缩感知是利用数据的冗余特性,只采集少量有用的样本来还原真实采集数据。在采集数据的时候,直接采集S个有效的测量值,而不是满足传统的奈奎斯特采样定律要求的采样频率必须是信号最高频率的2倍或2倍以上[9]。
CS理论的实现是以采集的原始信号本身是稀疏的或者在某变换域上稀疏作为前提条件的,采用测量矩阵观测被测信号,由观测值结合重建算法,如L1范数算法、正交匹配追踪(Orthogonal Matching Pursuit, OMP)算法等来重构信号[10]。
设振动信号为f∈RN×1,存在正交基Ψ∈RN×N可以使信号x被表示为
(5)
式中,正交基Ψ是由一组函数组成的,Ψ=[Ψ1,Ψ2,…,ΨN];变换系数θ理论上是稀疏的,也就是说θ中含有极少数的非零项,其余数值均为零。然而实际信号很难有正交基能使θ稀疏,大部分都是近似稀疏的,即θ中有许多非零值,但其中绝大部分的数值近似为零,在θ中所占比重可以忽略不计。我们的目的就是寻找Ψ,使θ尽可能的稀疏。
将振动信号f投影得到观测基Φ上,从而得到低维的观测矢量y,理论公式为
y=Φf
(6)
式中,y∈RM×1为观测矢量,原始信号f∈RN×1。观测基Φ由一组观测函数组成,Φ=[φ1,φ2,…,φN]。Φ需要满足一定的不相关性,即与Ψ不相关。由以上公式可得
y=ΦΨθ=Aθ
(7)
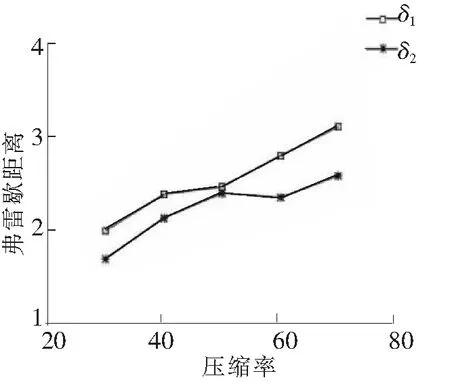
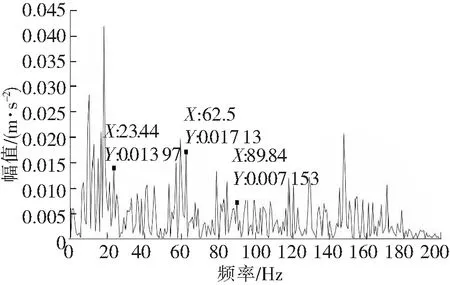
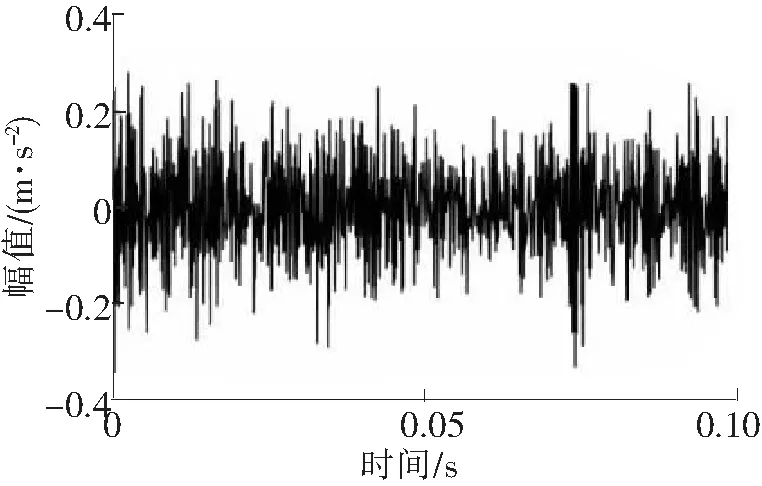
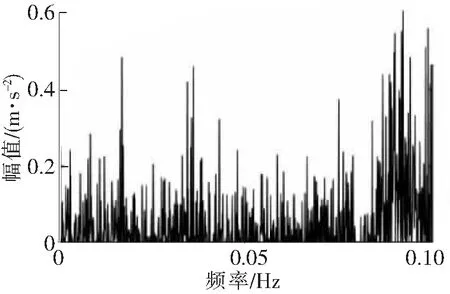
式中,Φ成为感知矩阵,Φ=ΦΨ。当变换系数θ是k稀疏的,且k min‖θ‖0s.t.y=Φf=ΦΨθ, (8) 求解式(8)常用的方法有L1范数算法、基追踪算法和OMP算法等。除此之外,压缩感知还有2个重要的条件——稀疏性和约束等距性(Restricted Isometry Property, RIP)[5]。即f是稀疏的,或者在某个变换域内是稀疏的。观测基Φ必须满足RIP条件。 基于MCKD的振动信号压缩感知方法流程如图1所示,算法步骤如下: 图1 基于MCKD的振动信号压缩感知方法流程图 (1)对振动信号f进行采集; (2)利用MCKD方法对采集的振动信号f进行降噪,提高信号的稀疏度; (3)对降噪后的振动信号f1进行压缩采样,得到测量值y; (4)利用L1范数算法重构,得到重构系数θ1,求得重构信号f2; (5)对f2进一步分析,验证信号特征频率是否丢失。 为验证基于MCKD的振动信号压缩感知方法是可以提高信号重构性能的,设置如下仿真信号进行实验分析。此仿真信号模拟的是轴承内圈局部故障时的振动信号。信号的采样频率为16 000 Hz,采样点数为4 000。 (9) 图2 冲击信号和仿真信号的波形 式中,h=1,2,3…;fr为转频,fr=20 Hz;fn为共振频率,fn=5 000 Hz;C为信号衰减系数,大小为1 000;τh为第h次冲击相对于特征周期T的微小波动;随机波动服从均值为0的正态分布;标准差为转频的0.5%;n(t)为高斯噪声,标准差为2,加入噪声后的信号信噪比为-11.27 dB;U(t)为单位阶跃函数;计算所得故障特征频率fi=3.906 Hz。 冲击信号波形图和仿真信号波形如图2所示,从图中明显可以看出,噪声已经完全掩盖了周期冲击成分,没有可循规律。 利用MCKD将原始信号进行预处理,得到降噪后的信号f1。f与f1频域图如图3和图4所示。在模拟的振动信号中随机截取512个点进行分析,由公式(5)求得图3中信号f的稀疏度为450,图4中信号f1的稀疏度为325,对比可知降噪后信号更为稀疏。 图3 模拟故障信号f的频域图 图4 MCKD降噪后模拟故障信号f1的频域图 下面比较降噪后的信号f1与原信号f利用压缩感知方法的重构性能。本文采用离散Fréchet(弗雷歇)距离δ来评价2条曲线的相似度,采用压缩率来衡量振动信号的压缩程度,其定义如下: (1)弗雷歇距离(Fréchet distance)。1906年法国数学家Maurice René Fréchet提出了一种基于空间路径相似度的描述方式,其着重将路径空间距离考虑进去,对于有一定空间时序的曲线相似度的评价效率更高,这便是弗雷歇距离[11]。弗雷歇距离越小,说明重构信号与原始信号的差异越小,2条曲线相似度越高[10]。其数学表达式为 (10) 式中,j为原信号轨迹P的长度;u为重构信号轨迹Q的长度;α(t)为原信号运动位置描述函数;β(t)为重构信号运动位置描述函数。若将变量t约束到区间[0,1]内,则有α(0)=0,α(1)=j,β(0)=0,β(1)=u。 (2)压缩率(Compression rate, CR)。用压缩率来衡量振动信号的压缩程度,CR值越大,信号压缩率越高[12]。其数学表达式为 (11) 式中,S1为原信号长度;S2为压缩测量信号长度。 原始信号f经过传统的压缩感知方法重构生成的信号为f2。将降噪后的信号利用压缩感知方法生成观测值y,然后由传输网络将观测值y传输到控制中心对其进行处理,通过L1范数重构算法对其进行重构,生成新的信号f3。压缩率为60%时,信号f3的时域和频域如图5和图6所示。 图5 f3重构后信号的时域图 图6 f3重构后信号的频域图 分别在30%、40%、50%、60%、70%压缩率下,计算原始信号f与重构信号f2的弗雷歇距离δ1;计算MCKD降噪后的信号f1与重构信号f3的弗雷歇距离δ2,结果如图7所示,从图中可以很明显地观察出,基于MCKD的振动信号压缩感知方法的相似度大于传统的压缩感知方法。 由于本次实验在先前已经对模拟信号进行了MCKD降噪处理,所以直接对降噪后重构的信号f3进行包络解调分析。包络谱如图8所示,对于轴承内圈故障的6倍频、16倍频及23倍频较为显著,因此能够认为故障是存在的。 图7 仿真信号在不同压缩率下的弗雷歇距离图 图8 仿真信号经过MCKD降噪后重构信号的包络谱 实验采用图9所示的动力传动故障诊断综合实验台(DDS实验台)设置相关故障并对其进行实验验证。图10为内部的齿轮传动简图。轴承具体参数如表1所示。 图9 动力传动故障诊断综合实验台 图10 DDS实验台齿轮传动简图 表1 故障轴承几何参数 本次的实验为轴承内圈和齿轮缺齿的复合故障,故障位置在中间轴。故障的轴承和齿轮如图11、图12所示。实验中电机的转频为40 Hz,采样频率12.5 kHz。通过计算,理论上轴承内圈的故障频率为13.77 Hz,齿轮缺齿的故障频率为91.35 Hz。 图11 轴承内圈故障图 图12 齿轮缺齿故障图 利用MCKD将实验采集的振动信号f4进行预处理,得到降噪后的信号f5。f4与f5频域如图13、图14所示。在采集的振动信号中随机截取1 024个点进行实验分析,图13中信号f4的稀疏度为619,图14中信号f5的稀疏度为413,对比可知降噪后信号的频域图比原信号频域图更加稀疏。 图13 实验故障信号f4的频域图 图14 MCKD降噪后实验故障信号f5的频域图 下面比较降噪后的信号f5与原信号f4利用压缩感知方法的重构性能。将降噪后的信号f5利用压缩感知进行压缩测量生成观测值y1,用L1范数重构算法对其进行重构,生成新的信号f6。压缩率为60%时信号f6的时域和频域如图15和图16所示。 图15 重构后信号f6的时域图 图16 重构后信号f6的频域图 在30%、40%、50%、60%、70%压缩率下,计算原始信号f4与其经过传统压缩采样重构后的信号的弗雷歇距离δ3;计算MCLD降噪后的信号f5与其压缩采样后的重构信号f6的弗雷歇距离δ4。实验结果如图17所示,从图中可以很明显地观察出,基于MCKD的振动信号压缩感知方法的相似度明显优于传统的压缩感知方法。 由于本次实验在先前已经对原始信号进行了MCKD降噪处理,故直接对降噪后重构的信号f6进行包络解调分析。包络谱如图18所示,对于轴承内圈故障,2倍频、6倍频及8倍频较为显著,因此能够认为内圈故障是存在的。同理,对于缺齿故障,能够观察到2倍频,并且与理论的1倍频数值91.35 Hz相差较小,能够认为发生了齿轮缺齿故障。 图17 实测信号在不同压缩率下的弗雷歇距离图 图18 MCKD降噪后重构信号的包络谱 为了提高振动信号压缩传输性能,提出了一种基于MCKD的振动信号压缩感知方法。通过实验验证,证明了将信号先进行MCKD降噪预处理,能有效提高信号的稀疏程度,且预处理后的信号可压缩程度更大,压缩后再重构的精度更高。该方法在保证故障频率不丢失的前提下提高了信号的重构精度。在相似度一样的前提下能提高信号的压缩率,用更少的数据表示原始信号,为振动信号的数据传输提供了新的思路。3 基于MCKD的压缩感知方法流程

4 仿真分析






5 实验验证









6 结论
猜你喜欢
当代陕西(2022年4期)2022-04-19
摄影世界(2022年1期)2022-01-21
北京航空航天大学学报(2021年9期)2021-11-02
防爆电机(2021年4期)2021-07-28
成都信息工程大学学报(2021年1期)2021-07-22
北京汽车(2021年2期)2021-05-07
科学与财富(2018年26期)2018-10-24
科技信息·中旬刊(2018年4期)2018-10-21
航空维修与工程(2018年8期)2018-09-10
天津诗人(2017年2期)2017-11-29
