大型风力发电机组先进控制技术探讨
2020-11-16 05:50彭先伟兰杰张瑞银姚森
电力与能源系统学报·下旬刊 2020年4期
彭先伟 兰杰 张瑞银 姚森
摘要:中国风力发电行业发展迅猛,目前陆上风力发电机组功率达5MW,海上机组已突破10MW,随着大功率、长叶片技术快速发展,对风力发电机组控制系统也带来新的要求和挑战,例如提升发电量,如何进一步降低载荷等,本文探讨了目前行业内主流的一些先进的控制技术。
关键字:风力发电、控制系统、先进控制技术
1、风力发电机组控制系统概述
风力发电机组控制系统主要监测风机系统的各种状态(风况,温度、电网状态、振动、转速、功率),完成整机的综合控制和低压配电,完成数据的采集、输入、输出信号的处理,逻辑功能的判定,与变流器及变桨控制系统通讯、接收变流器及变桨控制系统的信号,与中控室监控系统通讯、传递实时信息。
控制系统通过控制发电机转速、转矩及桨矩角,使风机运行在最佳叶尖速比状态及额定功率状态,保证风机安全可靠经济的运行。
控制系统控制风电机组,实现如下四方面功能:
(1)机组自动启停控制
当风速检测系统在一段持续时间内测得风速平均值达到切入风速,并且系统自检无故障时,控制系统发出释放制动器命令,机组由待机状态进入低风速启动状态。如检测的状态不正常,则根据级别进入其它各类停机程序。
(2)变桨、转矩控制
当低于额定功率时,通过控制发电机转矩实现在小于额定功率情况下的最佳叶尖速比运行。当机组功率达到额定功率时,通过变桨控制来限制机组功率在额定功率范围内。
(3)停机保护
控制系统根据实时运行的诊断数据和预先设置的故障级别,将风电机组安全停止
(4)监测控制
控制系统实时监测机组的运行状态和运行参数,控制机组的各部件运行,记录运行数据,包括:
a. 风电机组状态、风速、风向、桨距角、风轮和发电机转速、电气参数(频率、电压、电流、功率、功率因数、发电量等)和温度、液压压力等,实时显示并上传至监控系统保存数据。
b. 状态监测包括振动、扭缆角度、电网电压/频率、制动闸块的磨损、变桨系统、变流器和偏航系统的运作情况以及机械零部件的故障和传感器的状态。
2、风力发电机组基本控制原理
风电机组变速运行,可分几个阶段,在极低的风速下,动态地调整发电机扭矩给定值使发电机转速维持在最小转速允许值。在低风速时,通过改变发电机给定转矩,控制叶轮转速在限定的范围内运行,实现最大风能捕获;在中等风速下,当达到额定叶轮转速时,动态调节发电机轉矩给定,维持叶轮转速在额定值;在额定风速以上,转矩给定达到额定值,利用变桨系统,维持额定功率输出。
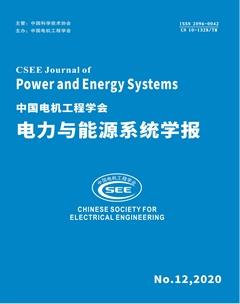
风机控制器的算法控制主要指转矩控制和变桨控制两部分。转矩控制器用于风能最大获取,变桨控制器用于额定风速以上时进行功率限制,保证风机正常运行。
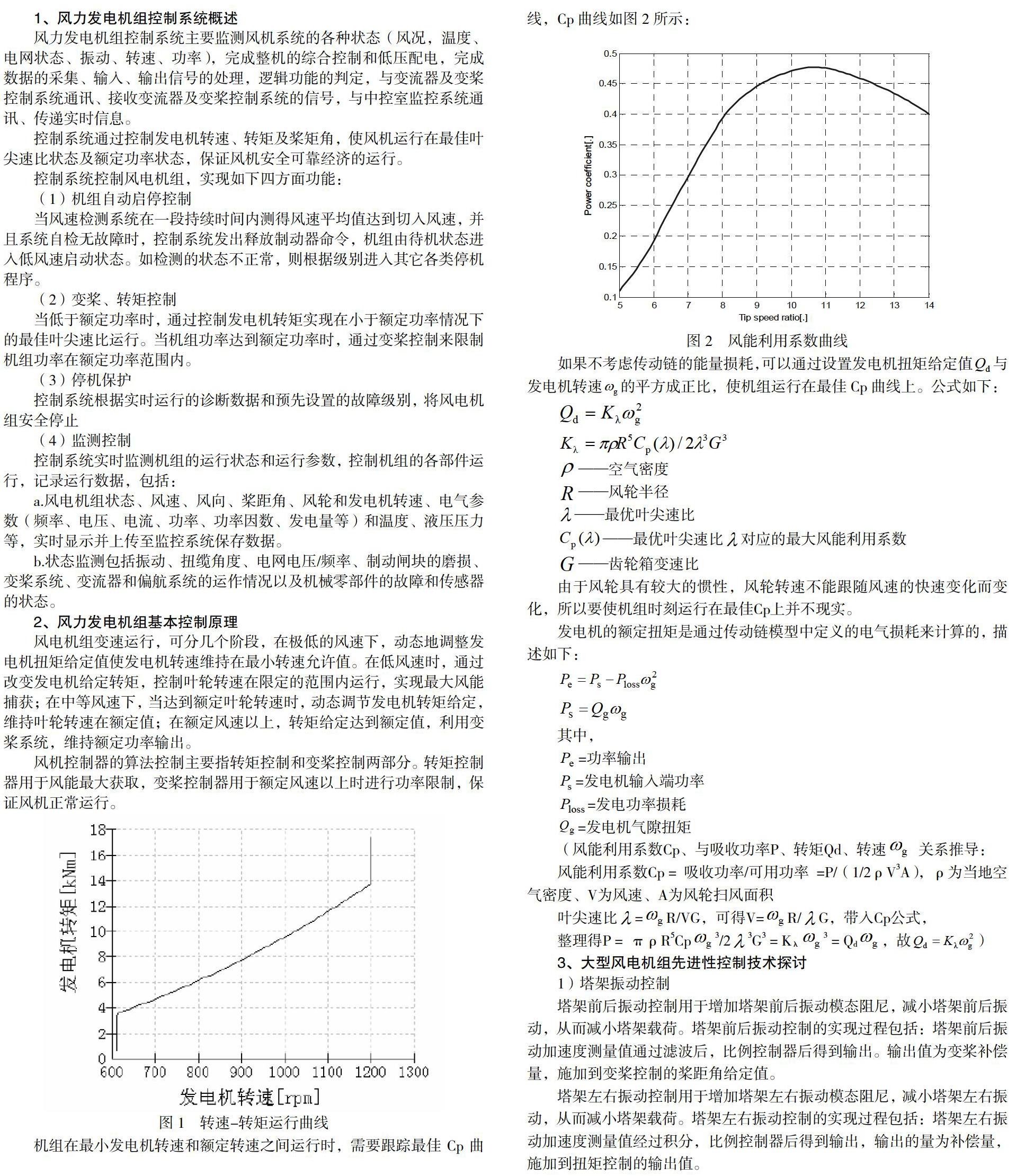
机组在最小发电机转速和额定转速之间运行时,需要跟踪最佳Cp曲线, Cp曲线如图2所示:
如果不考虑传动链的能量损耗,可以通过设置发电机扭矩给定值 与发电机转速 的平方成正比,使机组运行在最佳Cp曲线上。公式如下:
——空气密度
——风轮半径
——最优叶尖速比
——最优叶尖速比 对应的最大风能利用系数
——齿轮箱变速比
由于风轮具有较大的惯性,风轮转速不能跟随风速的快速变化而变化,所以要使机组时刻运行在最佳Cp上并不现实。
发电机的额定扭矩是通过传动链模型中定义的电气损耗来计算的,描述如下:
3、 大型风电机组先进性控制技术探讨
1) 塔架振动控制
塔架前后振动控制用于增加塔架前后振动模态阻尼,减小塔架前后振动,从而减小塔架载荷。塔架前后振动控制的实现过程包括:塔架前后振动加速度测量值通过滤波后,比例控制器后得到输出。输出值为变桨补偿量,施加到变桨控制的桨距角给定值。
塔架左右振动控制用于增加塔架左右振动模态阻尼,减小塔架左右振动,从而减小塔架载荷。塔架左右振动控制的实现过程包括:塔架左右振动加速度测量值经过积分,比例控制器后得到输出,输出的量为补偿量,施加到扭矩控制的输出值。
2) 转矩控制与变桨控制的解耦
在大于和接近额定风速时,转矩和变桨控制器会同时参与,使转速达到同样的设定值,所以解耦这两个控制环节是非常重要的。所谓解耦也就是说,在低于额定转速时,保证只有转矩控制起作用,此时桨距角为最佳桨距角的限定值;在大于额定转速时,只有变桨控制器起作用,而转矩设定在限值上以保证额定功率输出。
转矩控制和变桨控制的解耦有多种实现方法。本控制技术中采用的方法为,分别对转矩和变桨控制器的输入偏差引入偏置值:通过偏置值的作用,转矩控制输出未达到额定转矩时,变桨控制输出被限制在最小角度值;而当变桨控制输出大于运行角度最小值时,转矩控制器输出一直被限制在最大转矩值。
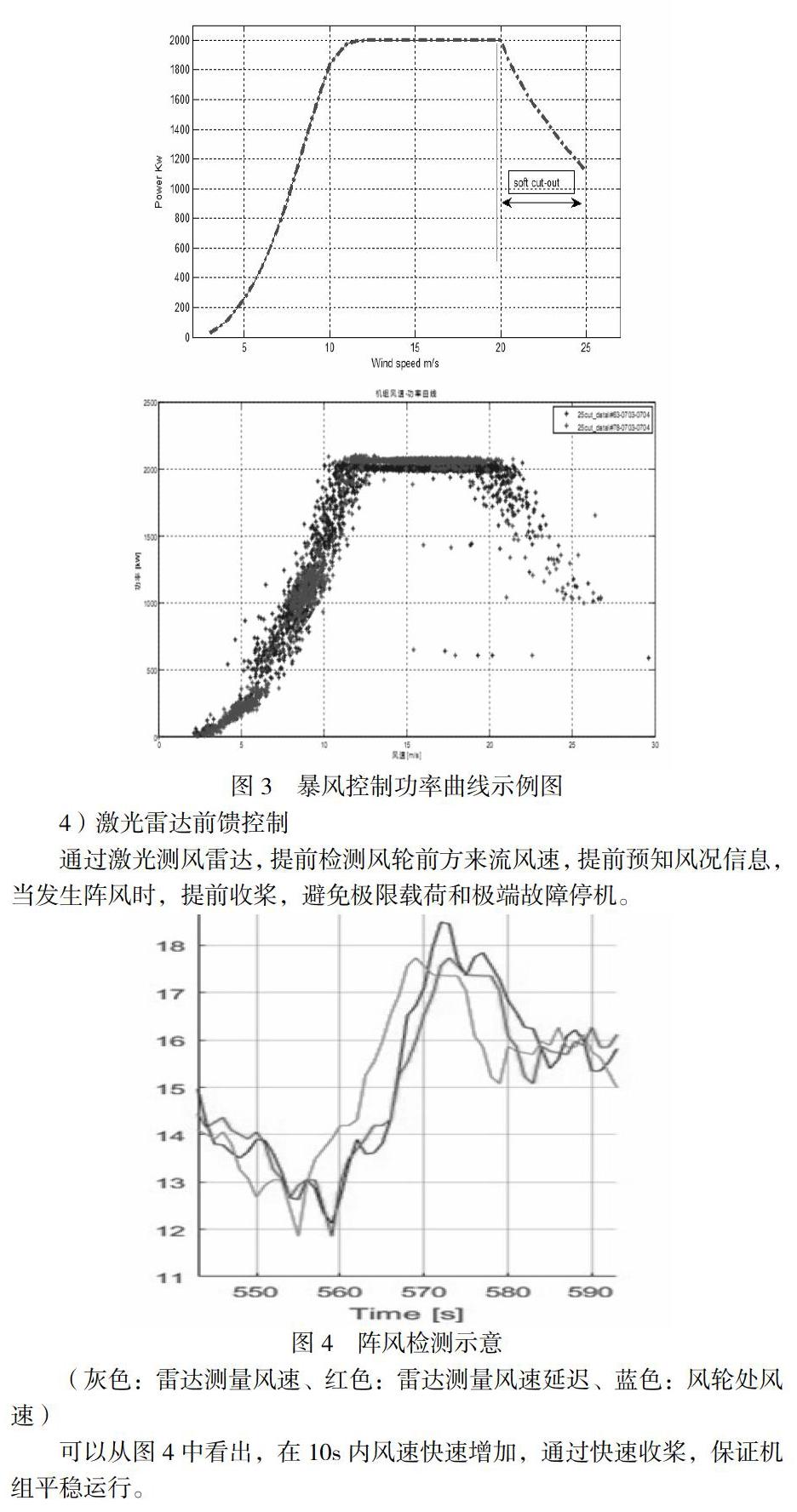
3)软切出控制(暴风控制)
目前一般机型设计切出风速为20m/s左右,根据项目实际风资源情况,可对风场超出设计切出风速的风频进行统计,若评估该风速段的发电收益可观(20~25m/s 风速段),那么可进行软切出控制,即将切出风速提升为25m/s或30m/s。为保证机组的载荷在设计包络范围内,在超出设计切出风速的风速段采用降转速和功率运行。
如下图所示,某风电场应用软切出策略的实际功率散点图,通过软切出的功率曲线和现场可研性的风频分布。若20~25m/s 风速资源较好,评估年发电量约能提升1%。
4) 激光雷达前馈控制
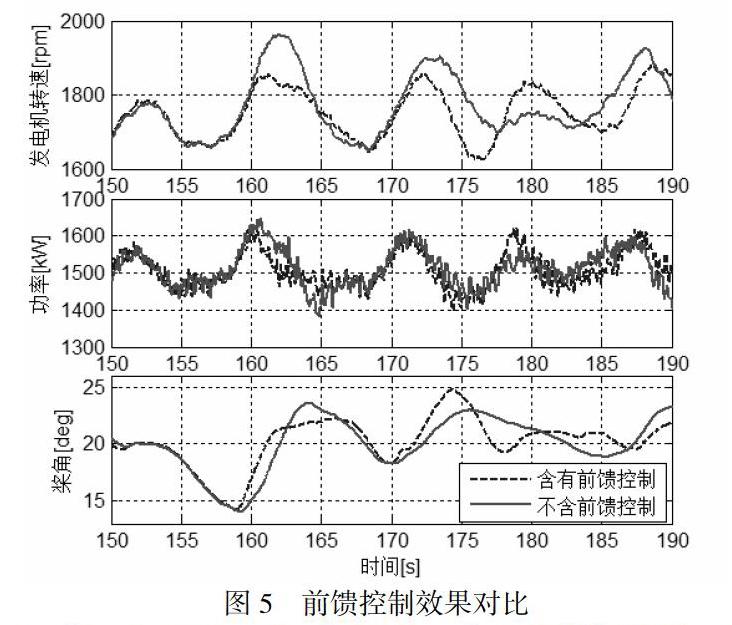
通过激光测风雷达,提前检测风轮前方来流风速,提前预知风况信息,当发生阵风时,提前收桨,避免极限载荷和极端故障停机。
可以从图4中看出,在10s内风速快速增加,通过快速收桨,保证机组平稳运行。
图5说明,加入激光雷达前馈控制后,当发生极限阵风时,转速、桨角、转矩控制更加平稳。
5) 偏航误差控制
由于风速风向测量设备实际运行过程中,存在测量误差,某些风力发电机组长期存在一定的偏航误差,影响机组发电量。激光雷达测风设备可以定期校正传统风向标的测量误差。
将一定时期的激光雷达测风数据记录在储存设备中,调取数据统计静态偏差值,自动校正传统风向标的风向偏差。
定期通过激光雷达校正传统风向标的偏差,从图6可以看出传统风向标存在5.146°的固定偏差,通过修正传统风向标的偏移参数,可提高机组对风效率,从而提升风力发电机组的发电量。
4、 总结
大功率、长叶片仍然会是未来大型风力发电机组的主流发展方向,另外风电平价并网也是未来发展趋势,通过先进控制技术来降低载荷、提升发电量、降低成本至关重要,是风电整机厂商核心竞争力;本文介绍了风电机组的控制基本原理,并对目前主流的关于降载荷、提升发电量先进性控制技术进行的简单探讨。
參考文献
[1]Morten H Hansen ,Anca Hansen ,Torben J Larsen. Cont rol Design for a Pitch-regulated ,Variable Speed Wind Turbine[ R] . A Report of Ris.2005
[2]Tony Burton ,David Sharpe ,Nick Jenkins , et al . Wind Energy Handbook[M] . John Wiley &Sons Ltd ,2001
[3]刘其辉,贺益康,赵仁德. 变速恒频风力发电系统最大风能追踪控制[J ] . 电力系统自动化,2003 .27 (20) :62 ~ 67
[4]邵桂萍,李建林,赵斌,等. 兆瓦级变速恒频风电机组变速控制策略的研究[J ] . 太阳能学报,2008 ,29 (9) :1167 ~1171
[5]张雷,李海东,李建林,等. 基于LQR 方法的风电机组变桨距控制的动态建模与仿真分析[ J ] . 太阳能学报,2008 ,29(7):781~785
[6]叶杭冶. 风力发电机组的控制技术[M] . 北京:机械工业出版社,2002
作者介绍:
彭先伟(1984.12-);男;湖北随州;汉族;硕士研究生;工程师;风机发电机组控制系统设计;东方电气风电有限公司。
猜你喜欢
今日自动化(2022年1期)2022-03-07
工业设计(2022年1期)2022-02-09
科技创新与应用(2020年15期)2020-05-21
中国新技术新产品(2019年5期)2019-05-21
现代农业科技(2018年11期)2018-08-14
吉林农业(2018年10期)2018-06-07
电机与控制学报(2018年9期)2018-05-14
科学家(2016年3期)2016-12-30
广东造船(2016年5期)2016-12-03
中学生数理化·八年级数学人教版(2016年4期)2016-08-23