
巡检机器人在煤矿中的应用研究
2020-11-16 01:53罗菲
中国新技术新产品 2020年16期
关键词:智能
罗菲
摘 要:现阶段,我国煤矿业形势严峻,存在开采难度大、人员水平不到位且企业不重视安全隐患等问题,给煤矿作业带来了不小的压力。该文主要围绕巡检机器人展开讨论,分析了煤矿作业中常见的问题,介绍了巡检机器人在煤矿中的主要应用,旨在为相关工作人员提供建议。
关键词:巡检机器人;智能;煤矿作业
中图分类号:TP242 文献标志码:A
0 引言
智能巡检机器人可以应用于煤矿开采领域,而且在现阶段,使用巡检机器人已成为煤矿作业主要的发展趋势。因此,该文对巡检机器人在煤矿中的应用进行研究,无论是对学术还是现实都具有重要的意义。
1 在煤矿作业中常见的问题
1.1 作业环境特殊复杂且危险
多数煤矿为地下作业,条件相对困难,且我国井深平均在400 m以上的井工煤矿占比率为95%,工作环境有明显的特殊性。主要体现在以下5个方面。1)井下作业场所空间较小。采煤工作面由煤层厚度决定,中厚煤层空间偏大,薄煤层以及极薄煤层的作业空间区域十分狭窄,给行人和运输造成不便。除此之外,采掘作业的条件因交替连接的状态常出现于采掘作业面,导致其变化较大。2)进行井下作业时产生超标噪声。这主要是因为井下作业人员要靠矿灯来弥补作业场所没有自然采光的情况,但是使用矿灯照明就会在作业时采用大量设备运转声较大的采掘设备和各种运输设备。3)在进行作业时无法控制井下环境湿度。尤其是无法预测井下作业场所和巷道是否存在淋水、积水现象。4)在生产过程中,随时可能会产生粉尘、有害气体,采深大的矿井因其具有地热现象,作业的环境温度也比较高。5)如果地下作业场所高效完成“井深巷远”的高难度工作,就需要作业人员长时间、高强度地进行劳动。
由于煤矿开采的特殊条件和环境,大多数煤矿的灾害因素多且产生的原因繁杂。煤气、水、火、矿井瓦斯、矿尘、水、火、冲击地压及有毒有害气体往往会威胁到煤矿的安全生产,甚至出现重大安全事故,如果安全管理不到位,设备、材料处于不安全状态,违章指挥和违章操作也会造成严重的人为事故。
1.2 煤矿生产设备多且大多數较为陈旧
运输设备、通风压风设备、供电及电气设备、排水设备、采掘设备等常用于环节多、工艺复杂的煤矿作业中。此外,还需要有保障安全生产的安全监测监控及瓦斯抽放设备,以此确保设备多而杂的煤矿机电能够高效安全的运行。由于矿井的建设时期无法保持统一,现如今,有些矿井现已存在上百年,因而造成矿井的设备水平较低。例如,带式输送机系统的相应设备经过长期的使用必然会出现老化的情况,这就导致其已经无法适应现在重要运输任务的要求,还会多次出现漏检、故障的现象,更严重的情况是带式输送机在巡检周期内出现故障。人工检查,这些设备通常使用数量有限的永久性安装传感器和固定的监控摄像机进行监控(除人工巡检以外),很难全面准确地实时检测和维护设备的运行状态。
2 巡检机器人在煤矿中的主要应用
2.1 煤矿相关工作者对于智能巡检机器人的应用
我国的煤矿资源非常丰富,也是我国主要的消耗能源,煤矿开采目前仍是高危行业之一,煤矿安全巡检工作对保障煤矿安全生产至关重要,虽然传统巡检方式效率低,但是由于在生产中具有重要作用,必须进行有效巡检。
在煤矿作业环境的日常工作中,为了确保工作人员的安全环境,煤矿作业人员现已经采用了更加安全、高效、科学的管理模式。如今在部分煤矿作业中已经使用了智能巡检机器人代替人工安全的巡检工作,这主要是因为巡检机器人无论是在硬件还是软件方面都具有替代人工安全巡检的能力,并且与人工安全巡检相比具有更大的发展空间。以硬件技术为例,智能巡检机器人在硬件技术方面具有收集煤矿信息数据的基本功能,并且具备监控摄像的技术,进而能将预警内容及时汇报,是一种科学巡检技术。煤矿作业人员需要注意在使用巡检机器人前,要针对煤矿工作的特点和环境,分析巡检机器人以便于更熟练地使用巡检机器人,提高工作效率。基于此种情况,笔者认为机器人的研发人员要深入调查矿井的情况,并完善当前煤矿作业中巡检机器人的设计情况,保证煤矿作业人员能够更好地运用该技术[1]。
2.2 智能巡检机器人的应用
现如今,我国生产与建设的煤矿总产能为45亿吨~47亿吨左右,煤炭产量大概在37亿吨,预计到2020年末,我国煤炭企业集团总产能占全国总产能的44%左右,且其中大多数煤炭企业集团的生产能力可达到5 000万吨/年以上,而根据行业数据显示“2020年中短期内煤炭价格或将下降,行业利润总额或将小幅减少”。由此可见,人工巡检现已无法满足社会的需求,因而煤炭企业要争取在煤矿作业环境中逐步将智能机器人的利用率大范围提高,从而减少人工成本。
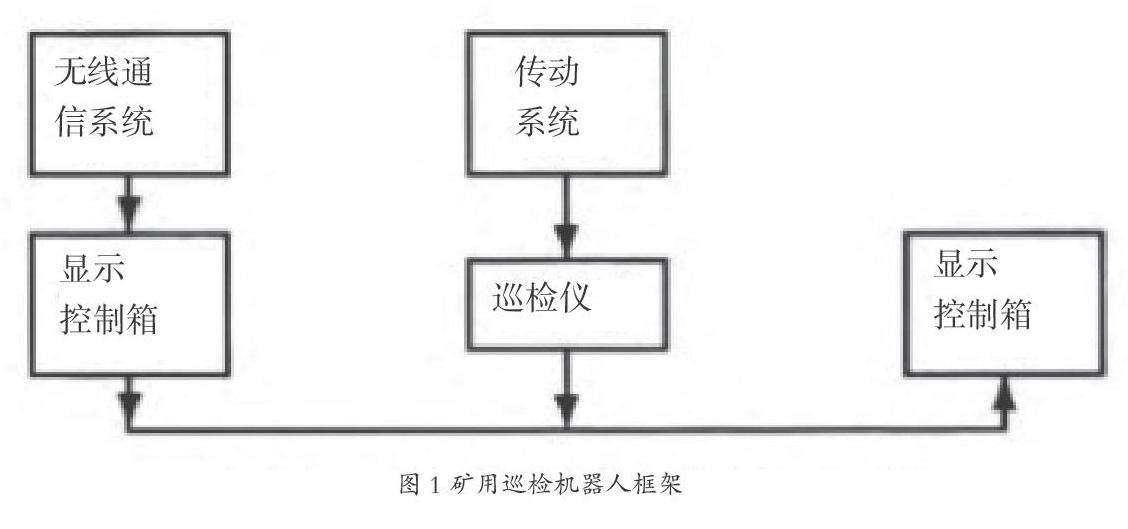
以某煤矿企业所应用的智能巡检机器人系统为例,在矿山生产过程中,带式输送机扮演了重要的角色,主要负责矿物的运输,结合上文可知,带式输送机运行环境极为复杂,很容易在环境的影响下受损,针对此类情况,某矿业企业依据高产高效、少人无人的建设目标,在带式输送机沿线安装了矿用巡检机器人,在了解后得知,巡检机器人安装的斜井巷道断面,其宽度为5.8 m,高度为4.6 m,腰线的高度为1.78 m。在巡检机器人应用后,移动巡检目标成功实现,究其原因,主要是巡检机器人会自动采集、存储矿井内的数据,并在此基础上,对数据进行分析,在此基础上发现和找出故障位置。与传统巡检方式相比,效率大幅度提升,同时不会对作业人员和输送机检修工作造成影响。矿用巡检机器人系统由多个部分构成,主要包括无线通信系统、传动系统、充电器、显示控制箱和巡检仪。在上述设备中,巡检仪的至关重要,在牵引系统的作用下,巡检仪会在通道内移动,且移动方向与带式输送机一致,在这一过程中会实时采集监控数据,并通过信号转换的方式,依托于无线网络向显示控制箱传输信号,工作人员可以利用可视化界面查看带式运输机的运行情况,在对比后得知,矿用巡检效率与传统巡检方式相比,巡检效率提升了80%。矿用巡检机器人的框架如图1所示。
在应用矿用巡检机器人的过程中,需要基于带式输送机的运行环境选择合适的安装方式,目前,常用的安装方式有2种,一种是传统系统安装,另一种是电气安装。该矿井所采用的安装方式为传动系统安装,究其原因,主要是这种安装方式可以在带式输送机支撑架或巷道顶部安装机器人,不会影响设备和人员安全,同时还能采集更多的现场数据[2]。
2.3 智能矿巡检机器人在工作过程中的应用
智能矿巡检机器人以自主或遥控的方式,在无人值守的皮带运输机对托辊滚筒和运输带四周环境进行巡检,可以及时发现设备的热故障、噪声异常现象,并对四周环境温测、气体探测分析预警,提高运行的工作效率和质量,真正起到减员增效的作用;以工业高速摄像头为视频采集工具,工业计算机运行的高速视频分析软件为处理工具,高速光纤以太网为传输介质,云数据平台由系统数据支撑。它能识别、报警和阻止输送皮带上威胁皮带安全的大型锚具、原木、铁管等物料,还可以对输送皮带机硫化的连接点(头)进行集中取样和分析,从而显著减少皮带机纵撕和皮带中断的事故发生,尤其是输送皮带机的监测、分析和故障指示,对于视频数据的自动检测和分析,错误诊断,报警数据的自动存储和上传,可对输送皮带机进行持续检测,实现连续且动态的记录皮带机设备的状态。在一定程度上确保固定式、离散式在线监测系统能够完全覆盖输煤系统,解决了一旦发生紧急情况,工作人员无法第一时间向监测中心收集汇报现场情况的难题,在必要时能够对输煤的特定部位采取有效的处理措施。而且可以在第一时间进入事故现场,将现场的视频、图像报警等数据发送回指挥中心,起到更好的防灾减灾效果[3]。
2.4 5G巡检机器人的应用
5G巡检机器人是一款智能型全自动巡检机器人,对作业区域执行巡逻、检查和警示等作业,并进行实时传输、保留现场信息。因新出现的5G智能巡检机器人在原有巡检机器人自身所具备特点的基础上,将5G大带宽以及低延时的传输能力进行有效结合,并在此基础上将智能机器人安防巡检的作用加以有效利用。那么对于大多数企业来说,可以在研发机器人时将5G通信技术融入,并结合自主研发能力(如智能驱动、SLAM导航、自主避障、智能识别、远程交互以及环境监测等技术),打造出属于企业自身的具有智能化、模块化、接口丰富等特点的巡检机器人。从物联网、AI、人工智能,再到5G时代,这些都是当下备受关注的热点信息,5G智能巡检机器人可谓汇集了以上所有热点信息。5G智能巡检机器人的出現以及日后会进行全方位的升级迭代,不仅为煤矿作业的工作带来方便,提高效率,也给家庭或者一些场所的安防工作注入了新的活力。
3 结语
综上所述,在煤矿生产和建设的过程中必须保持采掘平衡,从而使矿井能够进行持续生产。与此同时,相关工作人员还要运用智能巡检机器人,以保证各个环节能够顺利有效的进行,确保煤矿作业进行安全生产。
参考文献
[1]邵珠娟,邓晓刚,程豪杰.智能带式输送机巡检机器人在煤矿的应用[J].中国煤炭,2020,46(6):35-39.
[2]周静龙.巡检机器人在煤矿的应用分析[J].煤,2020,29(5):53,85.
[3]张旭辉,周颖,杨文娟.位姿检测技术在煤矿井下工作面巡检机器人中的应用[J].传感器与微系统,2020,39(5):152-155,160.
猜你喜欢
开放教育研究(2021年3期)2021-05-25
小学科学(学生版)(2020年12期)2021-01-08
装备制造技术(2020年4期)2020-12-25
表面工程与再制造(2019年6期)2019-08-24
中国设备工程(2017年1期)2017-03-09
中国卫生(2014年6期)2014-11-10
