
激光点云数据在建筑小品精细建模中的应用
2020-11-16 08:48王洪蜀汪仁银朱逍贤
四川建筑 2020年5期
王洪蜀,汪仁银,朱逍贤
(四川水利职业技术学院测绘地理信息系,四川成都 611231)
三维激光扫描技术又叫实景复制技术,能够快速、主动、无接触地获取目标物高精度、高密度的激光点云数据,基于激光点云数据的三维建模技术在文物遗产保护、建筑物监测、室内场景还原、灾害模拟预警、城市规划、城市数字化等诸多领域被广泛应用。在文化遗产方面,化蕾等人开展了客家土楼真实感、精细化三维建模的应用研究[1],为文物保护作出了重要的贡献;贾小凤等人利用三维激光点云数据对室内场景物体进行三维模型建立,并与基于几何测量数据建立的三维模型进行对比,表明点云数据进行室内物体精细建模更有优势[2]。孙杰等人提出了基于三维激光点云的矿区建筑物形变特征提取方法,通过实测数据验证了该方法的可用性[3]。朱曙光等人详细论述了基于 Leica Scan Station P40 三维激光扫描系统在建筑物精细建模中的应用[4]。以上是目前一些学者利用激光点云数据展开的三维重建方面的应用研究,而在建筑小品方面的应用研究涉及非常少。建筑小品作为一种独立的地物,是布置在街头、广场、绿地等处室外环境中的小型建筑设施,大部分除具有使用功能外,还具有观赏和装饰功能,造型独特,富有艺术性,比如常见的雕塑、石盆景。用传统的测量手段获取建筑小品表面三维数据难度大、工作繁琐、精度差,鉴于这个问题,本文主要研究以三维激光点云数据作为基础数据源,构建建筑小品(日晷)精细三维模型。
1 激光点云测量原理
三维激光扫描技术是一项高新测量技术,突破传统单点测量方法、能够快速海量地测量目标物体表面的三维空间坐标,海量点的集合,称为“点云”。三维激光扫描仪向目标物体发射激光,激光束按设定分辨率依次扫过测区,测量每个激光脉冲从发出经目标物表面返回仪器所经过的相位差(或者时间差)来计算扫描仪至扫描点的距离r;同时测量每个激光脉冲横向扫描角度值α和纵向扫描角度值β,最后根据获得的距离和角度值计算出每个扫描点相对于测站点的空间三维坐标。如图1所示,在这样的一个三维激光扫描仪器内部坐标系统中,坐标原点O为激光发射点,X轴、Y轴在仪器横向扫描平面内,X轴与Y轴相互垂直;Z轴在仪器纵向扫描方向面与横向扫描面垂直,构成右手坐标系[5]。每个点的三维坐标计算公式如下[6]。
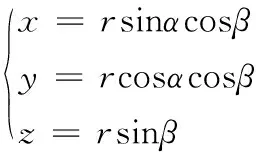
(1)
图1 仪器内部坐标系
2 激光点云数据采集和处理
2.1 激光点云数据采集
本研究利用Leica ScanStation C10三维激光扫描仪进行建筑小品(日晷)点云数据采集。Leica ScanStation C10是一种脉冲式扫描仪,可实现360 °×270 °范围的扫描,扫描速度可达50 000点/s,单点的测量精度可达 mm 级,点云最小间隔可达1 mm。
扫描前应踏勘现场情况,根据扫描目标物位置、形状及周围地物的分布合理设置测站位置和数量,测站位置应选在地势平坦、视野开阔、地基稳定的地方,尽量以较少的测站数获取目标物的全部点云数据。由于各个测站数据是各自内部独立的坐标系,为了统一在一个固定的坐标系中,在采集数据时,应根据实际情况和具体需求,考虑后期的配准方法。本研究采用公共标靶进行各测站数据的拼接,测站与标靶布设如图2所示。公共标靶应布设在各测站扫描范围的重叠区域,测站之间至少布置3个标准靶,且满足这3个标准靶不在同一高度线上,以免产生线性关系,降低软件解算的结果误差。现场布置好之后,通过设置扫描仪的视场范围、分辨率等参数依次进行目标扫描、标靶粗扫描、标靶精扫描、场景拍照完成对目标物(日晷)点云数据和影像数据的获取。

图2 测站点与标靶分布
2.2 激光点云数据处理
激光点云数据处理主要是利用Leica高清晰测量系列扫描仪配套的数据后处理软件 Cyclone完成,其处理过程包括点云配准、粗噪点的剔除、格式转换等内容。
点云配准是将多个不同ScanWorld向一个基准坐标系转换,此过程不同的ScanWorld通过同名点对约束条件旋转相应的三个方向坐标轴,合并到基准坐标上,其内部结构并没有改变,只是相对于位置有了变化。本研究是将标靶中心作为同名点对,通过自动添加约束条件,实现基于标靶的配准,研究所用数据配准最大误差为1 mm。由于仪器误差、物体表面、周围环境等因素的影响,扫描点云中必然存在许多与目标对象无关的点云,必须剔除,以提高数据处理效率和保证后期建模精度,Cyclone软件中主要是对一个肉眼可判的一些噪声点进行剔除。为便于后期建模软件Geomagic Studio的使用,可将IMP格式的数据库文件,输出为TXT、PTX、XYZ等多种数据格式。
3 三维精细建模
将Cyclone软件导出的点云数据,借助Geomagic Studio软件构建建筑小品(日晷)的三维精细模型,一般会经过点处理、多边形处理、曲面处理三个阶段。
3.1 点处理阶段
点处理阶段主要是对处理后的点云做进一步的处理,使之更为精简,完成后封装为可用的多边形模型。导入的点云数据默认显示为黑色,为了更加清晰、直观地查看点云数据需要对其进行着色处理。由于Cyclone软件是通过肉眼判读去除噪声点,在此可以设置系统经验值选择非连接项、体外孤点进行去除。“减少噪音”操作删除了移动偏差较大的点云数据,使其变得平滑,提高曲面精度,其中“棱柱形(积极)”方式适用于物体表面有尖锐边角的曲面模型,适合本研究对象的处理。“封装”实质是将散乱的点云数据在空间生成多个三角网,用来更加逼真呈现点云的三维模型。
3.2 多边形处理阶段
扫描仪获取数据时,由于遮挡或物体表面反射等因素存在一些地方点云数据不完整或缺失,封装后的多边形模型表面会出现孔洞、尖状物等,因此需要对其进一步处理,为后面的曲面阶段奠定基础。首先需要进行填充操作,对一些漏洞进行修补。修补完后,多边形模型表面有明显凹凸不平的区域应进行平滑处理,可使用“去除特征”、“删除钉状物”、“松弛”工具。平滑处理完成后,使用“网格医生”工具检测模型有问题的网格并对其进行修复。一般情况下多边形数据量大,为减少内存占用提高建模速度,在保证模型精度的前提下可简化多边形,通过使用“简化”工具用更少数量的多边形来表示模型载体。
3.3 曲面处理阶段
曲面处理阶段可探测多边形模型表面生成轮廓线,并对效果不好的轮廓线利用编辑轮廓线工具进行修复;然后根据轮廓线构造曲面片并进行编辑处理使曲面平滑;再对曲面片构建栅格将其处理为指定分辨率的网格结构;最后将曲面片拟合成NURBS曲面,完成点云数据的逆向曲面造型。本研究拟合日晷的曲面效果如图3所示。
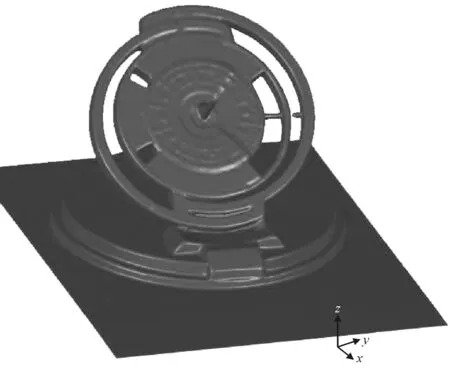
图3 日晷曲面模型
4 三维建模精度分析
在虚拟的环境下,为用户呈现逼真的现实环境,三维模型就必须精确地描述每个地物的真实三维尺寸,模型精度检验是三维模型重建中的一个重要环节。精度包括绝对精度和相对精度,本研究进行点位精度分析和距离对比分析。
4.1 点位精度分析
由计算式(1)可知,点的坐标直接受仪器系统的测距误差和测角误差的影响,此外仪器对中误差、标靶精度、点云配准等都会对点的坐标产生影响[7]。本文选取6个全站仪观测、且容易识别的特征点作为研究数据,将全站仪获取的坐标值与模型上点的坐标值进行对比分析。结果见表1。
分别计算X、Y、Z3个方向的坐标较差,然后由坐标误差计算式(2)得到点位精度。
(2)
由表1可以看出坐标点位最大误差4.3 mm,能够满足大多数三维建模工作的需求。
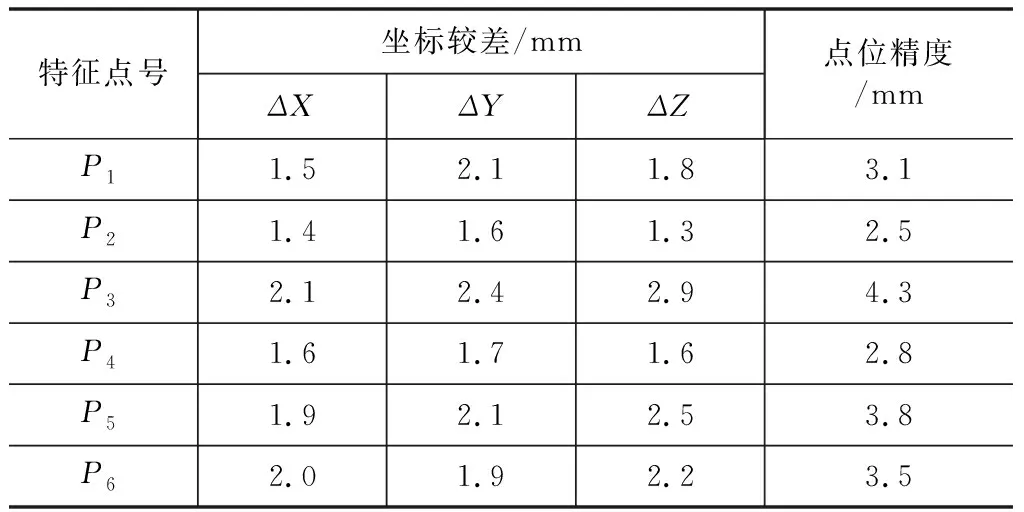
表1 点坐标对比
4.2 距离对比分析
本研究以钢尺量测的特征边长作为真值,在点云数据和模型数据上分别选取对应的特征边进行对比,并计算较差和相对误差,结果如表2所示。
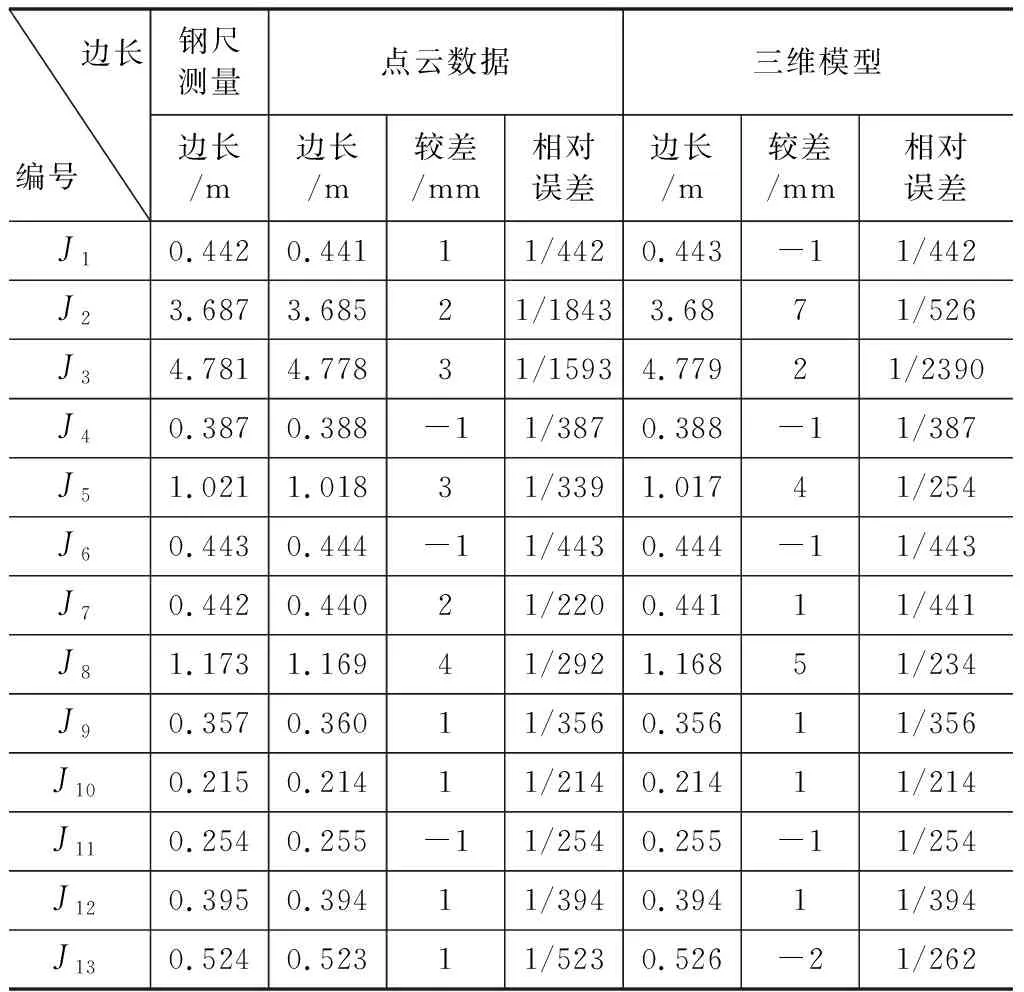
表2 距离对比
纵观表2可发现,经与钢尺测量的值对比,点云数据上量测的边长比三维模型上量测的对应边长与真值偏差较小,且分布稳定。点云数据边长变形检验最大偏差是4 mm,最小偏差为1 mm,最大相对误差是1/214,最小相对误差为1/1 843;由于点云数据点、多边形、曲面建模处理,三维模型对应边长变形检验最大偏差是7 mm,最小偏差为1 mm,最大相对误差为1/214,最小相对误差为1/2 309。
5 结论
本研究以建筑小品(日晷)为研究对象,利用三维激光扫描仪非接触、高效地获取激光点云数据,经点云数据处理后利用Geomagic Studio逆向建模软件建立了日晷的三维模型,并与全站仪实测坐标和钢尺实测距离数据进行了精度方面的对比分析。结果表明:利用三维激光扫描技术实现快速高精度、真三维模型的构建是可行的,且基于点云数据的模型构建更加形象直观。在未来的发展中,三维激光扫描技术可在精细模型构建等领域发挥重要的作业。
猜你喜欢
铁路技术创新(2022年3期)2022-10-27
现代仪器与医疗(2022年2期)2022-08-11
红领巾·萌芽(2022年6期)2022-06-27
文萃报·周五版(2021年45期)2021-11-17
数学大王·低年级(2019年12期)2019-08-14
模具制造(2019年3期)2019-06-06
文艺生活·下旬刊(2017年3期)2017-04-13
百科探秘·航空航天(2016年11期)2016-02-26
世界博览(2015年20期)2015-09-10
现代营销·经营版(2015年3期)2015-04-20
