
基于AHP-TOPSIS的果园作业平台舒适性评价及优化
2020-11-13 08:57高喜银白新瑀
图学学报 2020年5期
高喜银,王 贺,宋 强,白新瑀
(河北农业大学机电工程学院,河北 保定 071001)
2007年,国家农业部启动了现代苹果产业技术体系建设,果园机械装备是产业体系建设的重要物质基础。近些年,果园机械装备设计制造水平明显提升,但仍存在“有机难用”、“无好机用”的问题。果园作业平台能提供给果农多角度工作台,保障人手的活动范围能全面覆盖整棵果树,满足果农修剪整枝、花果管理、果实采收等作业要求。人、果园作业平台和工作环境构成了复杂的人机交互环境,当人机交互环境舒适性低时,人体极易产生生理的不适感和消极心理,造成认知时间加长、操作效率降低、错误率提高,严重时造成安全事故[1]。舒适性评价成为开发安全易用的果园装备的重要理论依据。其常用定量、定性的客观评价和综合评价3种方法,经过确定评价指标、获得数据、数据处理、评价结论4个步骤[2-3]。层次分析法(analytic hierarchy process, AHP)、Delphi主观评价方法具有易操作,成本低的优点,在农机装备舒适性评价中运用较多。AHP的优点是可靠性强、误差小,缺点是当评价指标过多时,易产生判断模糊,给出的判断矩阵很难满足一致性[2]。Delphi的优点是简单、有效,缺点是调研周期长[2]。张乐[4]运用AHP确定了元胡收获机的最优人机设计方案,邱变变[2]运用Delphi构建了农机装备全生命周期的人机综合评价指标结构。逼近理想解法(technique for order preference by similarity to an ideal solution, TOPSIS)
综合评价法常应用于人机界面的重要性排序,王金武等[5]利用TOPSIS法对联合收割机的操纵元件、指示灯元件、仪表元件进行重要性排序,确定人机界面的合理布局。
1 果园作业平台舒适性评价层次模型
1.1 果园作业平台的分类及特征分析
文献[6]从国内外市场搜集到64个果园作业平台样本,包含控制台、工作台、运输装置、动力来源、升降机构、梯子、轮胎等,根据动力来源不同分为牵引式和自走式2大类。工作台是满足果农全方位接触果树要求的主要部件,依据工作台的不同可将果园作业平台分为4类:①一字型是一体式平台,统一控制工作台的上下、左右2个自由度的移动幅度;②U字型是分体式平台,能独立控制每个工作台上下、左右2个自由度的移动幅度;③半控制型也属于分体式平台,可以独立控制部分工作台上下、左右2个自由度的移动幅度,但另外一部分工作台是固定的,不能控制;④Z字型属于台阶式平台,根据果园的作业高度要求和人体尺寸设定好平台的不同高度,只能调节工作台的水平移动幅度。见表1。
1.2 果园作业平台舒适性评价层次模型
果园作业平台的舒适性影响因素主要为发动机、悬梁、轮胎、传动系统、排气系统、发动机、梯子、工作台、操控台、运输装置等[6],自走式果园平台是站姿驾驶,没有座椅。评价指标较少,适合选用AHP进行舒适性评价。
AHP是20世纪70年代由美国学者SAATY[7]教授提出的一种定性与定量分析相结合的决策方法。该方法将决策相关的元素划分为目标、决策、方案或指标等若干层次,通过求解各层指标对上一层指标的权重关系,进而实现定性与定量决策[8]。果园作业平台舒适性影响因素比较少,易于选择为了获得果园作业平台舒适性影响因素之间的权重差异,需要建立舒适性评价层次模型。
基于对果园作业平台舒适性的理解和AHP的要求,本文邀请农业机械设计专家、人机工程学专家各5名构建了果园作业平台舒适性评价层次模型,如图1所示。

图1 果园作业平台舒适性评价层次模型Fig. 1 The hierarchical model of the comfort evaluation of the orchard work platform
果园作业平台的目标层为舒适性。舒适性目标层指标进一步细分为工作环境、操作舒适性2个决策层指标;其中工作环境指标由空间、振动、噪声3个一级指标层组成,操作舒适性由梯子、工作台、操控台、运输装置4个一级指标层指标组成。各一级指标层指标再进一步细分为若干个二级指标层指标。例如操控台的二级指标包括位置、尺寸和人机界面[9]。
2 基于AHP的果园作业平台舒适性评价
2.1 构造判断矩阵
判断矩阵是表示对上一层次的某个指标,本层次与其相关的若干指标之间相对重要性比较。通常判断矩阵的数值需向多位专家询问,将判断要素两两进行比较,并按重要性标度1~9进行赋值,得到判断矩阵的元素值aij(aij为因素i相对于因素j的重要性量化值,aji=1/aij),进而得到判断矩阵A=(aij)n×n[10]。其中,AHP判断矩阵标度及含义见表2。
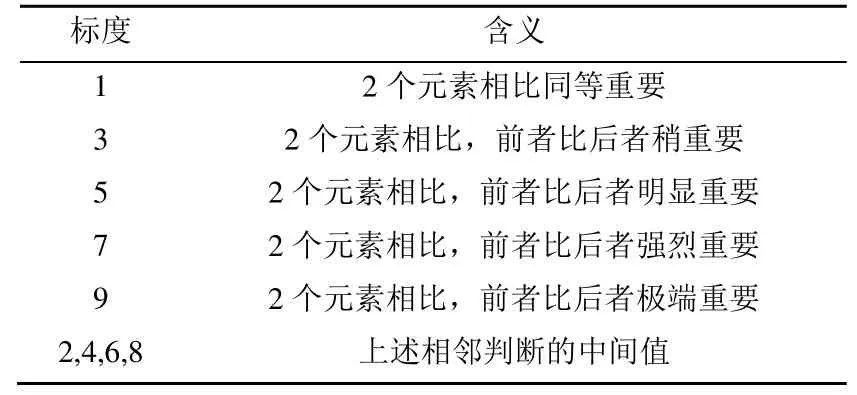
表2 判断矩阵标度及含义Table 2 Judgment matrix scale and meaning
根据图1所示的层次模型可知,A为目标层为舒适性;Bi(i=1,2)表示决策层用;Ci(i=1-7)表示一级指标层;Cij(i=1-7,j=1,2,3,4)表示二级指标层。统计得出各层的判断矩阵如图2~10所示。

图2 舒适性判断矩阵AFig. 2 Co mfort judgement matrix A
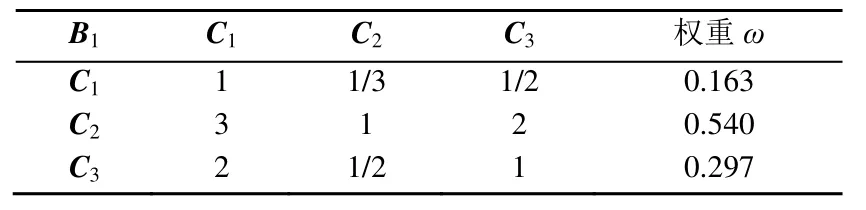
图3 工作环境判断矩阵B1Fig. 3 Work environment judgment matrix B1
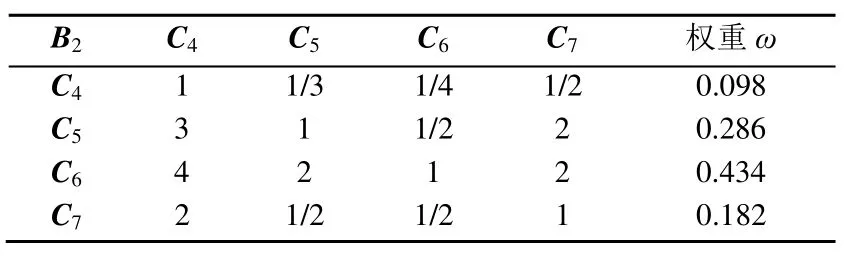
图4 操作舒适性判断矩阵B2Fig. 4 Operational comfort judgment matrix B2
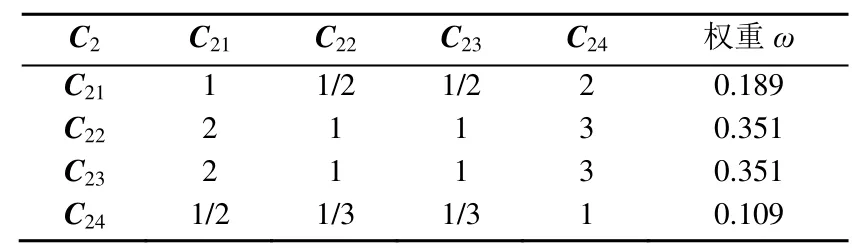
图5 振动判断矩阵C2Fig. 5 Vi bration judgment matrix C2

图6 噪音判断矩阵C3Fig. 6 N oise judgment matrix C3
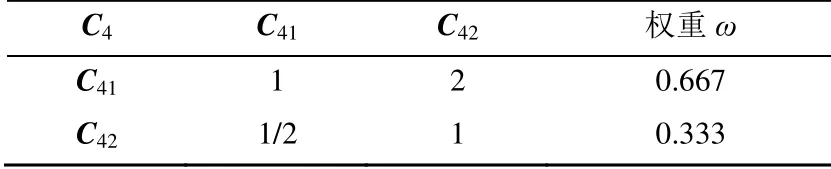
图7 梯子判断矩阵C4Fig. 7 Ladder judgment matrix C4

图8 工作台判断矩阵C5Fig. 8 Workbench judgment matrix C5
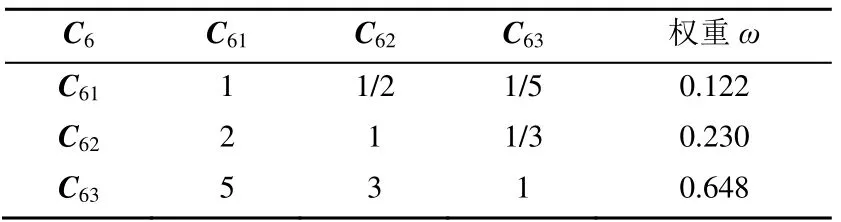
图9 操控台判断矩阵C6Fig. 9 C ontrol panel judgment matrix C6

图10 运输装置判断矩阵C7Fig. 1 0 Transport device judgment matrix C7
2.2 权重计算
AHP计算权重向量的常用方法有几何平均法、算术平均法和特征向量法[9]。本文采用几何平均法计算判断矩阵的权向量。将判断矩阵的行向量几何平均,然后归一化,得到的行向量即为权重向量。设A的最大特征根为λmax,其对应的特征向量为W,则有AW=λmaxW。具体的计算过程如下:
(1) 判断矩阵每一行元素做乘积,记为Mi,即

其中,aij为判断矩阵中的元素;n为判断矩阵阶数。
(2) 每行元素的几何平均值,记为ai,即

(3) 归一化处理,计算相对权重值为

(4) 计算判断矩阵的最大特征根为
2.3 一致性检验
在构造判断矩阵中层次指标进行两两对比时,由于人的认识存在片面性和主观性,在估计的过程中难免存在误差,影响可信度。因此需对判断矩阵进行一致性检验,即
其中,CI为判断矩阵的一致性指标;λmax为最大特征值;n为判断矩阵阶数。

其中,RI为平均随机一致性指标。当CR<0.1时,一致性检验通过;当CR≥0.1时,需要对判断矩阵进行调整。表3列出了1~8阶矩阵的平均随机一致性指标RI值[10]。

表3 1~8阶平均随机一致性指标RITable 3 1~8 order average random consistency index RI
对图2~10的判断矩阵进行一致性检验,具体数值见表4,可见各矩阵CR值均小于0.1,均通过一致性检验。
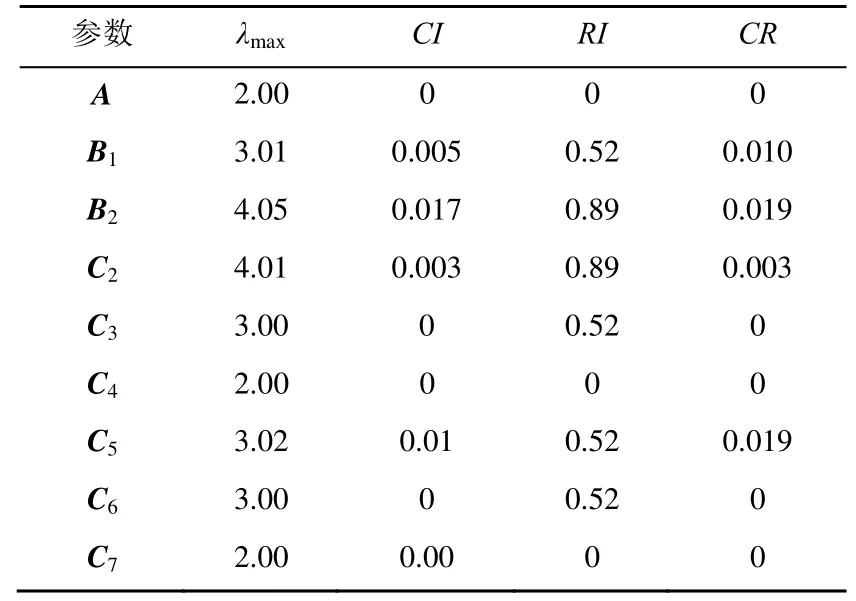
表4 各判断矩阵一致性检验Table 4 Consistency test of each judgment matrix
2.4 权重综合排序
各判断矩阵通过一致性检验后,便可对各指标进行综合权重的计算,进而直观地看出各指标相对于舒适性的权重占比,表5~7分别表示决策层、一级指标层、二级指标层占目标层(舒适性)的权重比较。
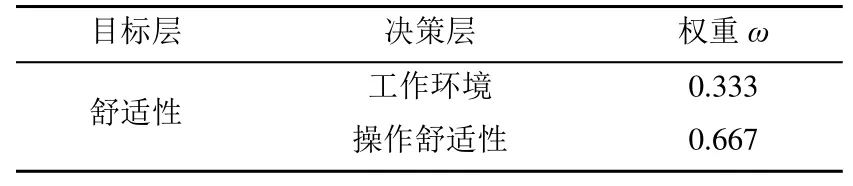
表5 决策层权重占比Table 5 Proportion of decision-making layer weights
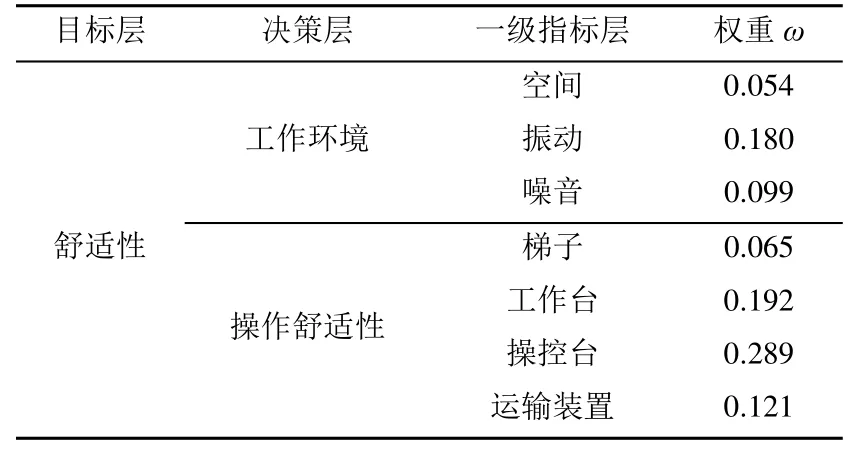
表6 一级指标层权重占比Table 6 Proportion of the weight of the first-level indicator layer

表7 二级指标层权重占比Table 7 Proportion of weights of secondary indicator layer
2.5 果园作业平台的舒适性评价结果
根据几何平均法算出各指标权重见表7,为验证计算结果的合理性,本文使用算术平均法和特征向量法进行权重计算,将3种计算结果进行汇总(表8)。
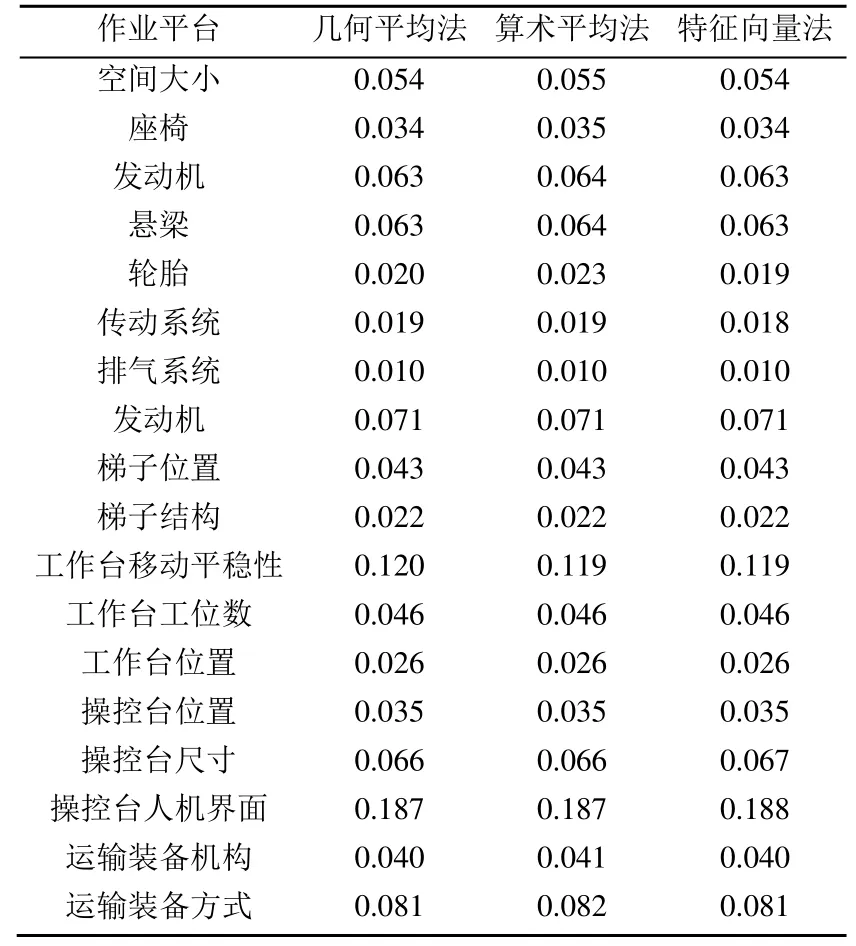
表8 3种算法计算的各二级指标权重值Table 8 The weight values of the secondary indicators calculated by the three algorithms
评价结果显示,工作台的移动平稳性是影响平台舒适性的重要因素,主要涉及起降机构设计;操控台的人机界面是影响果园作业平台舒适性的显著因素,操控台是操控作业平台的主要部件,其人机界面的合理布局涉及到驾驶员的操作舒适性和安全性。
3 基于TOPSIS的操控台人机界面舒适性优化
本单位研制的3GP-160自走式果园作业平台的操控台如图11所示[11]。操控台是果农驾驶平台、调节平台的主要工作场所,主要包括仪表、开启、指示灯3类,共17个元件[12]。优化前的操控台如图11所示。其中,起升、下降4个开关类元件处在一条水平线上,具有统一的颜色、形状和尺寸,不易识别;且放于方向盘的左下方,不符合右手操作习惯、同时存在视线遮挡等人机不合理问题。

图11 3GP-160自走式果园作业平台的操控台Fig. 1 1 3GP-160 self-propelled orchard operating platform console
3.1 基于TOPSIS的操控台元件的优先排序
元件间的重要性、使用频率、操纵顺序、相关性和相容性等内在逻辑关系是操控台人机界面合理布局的关键因素[13]。TOPSIS是多目标决策分析的一种常用方法,可以求解最接近理想解的元件权重,通过量化各元件的重要程度,对界面设计中元件的优先序布局起到指导的作用[13-15]。基于TOPSIS的要求构建了人机界面层次,如图12所示。其中,迈速表等各个元件是评价的第1层因素;仪表、指示灯、开关为该人机界面构成的第2层因素;操控台人机界面为第3层因素,也就是目标层因素。
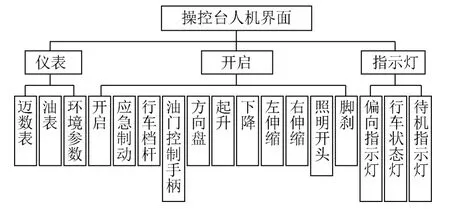
图12 操控台的人机界面系统Fig. 1 2 HMI system of the console
操控台的评价因素包括第1~2层级,评价顺序为从第2层级到第1层级,第1层级因素的评价结果受第2层级因素的影响。本文利用此方法对操控台人机界面的元件进行优先排序,具体计算过程如下:
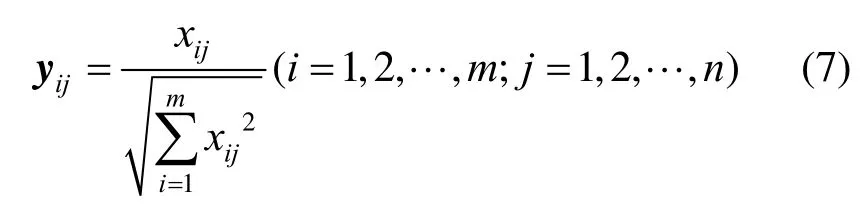
(1) 通过原始数据构造决策矩阵X=(xij)m×n。其中i为工况类别,共m个;j为评价指标,有n个;xij为评价指标在某个工况下的使用人数。
(2) 计算标准化矩阵Y=(yij)m×n,即
(3) 计算加权标准化矩阵Z=(zij)m×n,即

其中,ωj为权重。
(4) 设理想解为
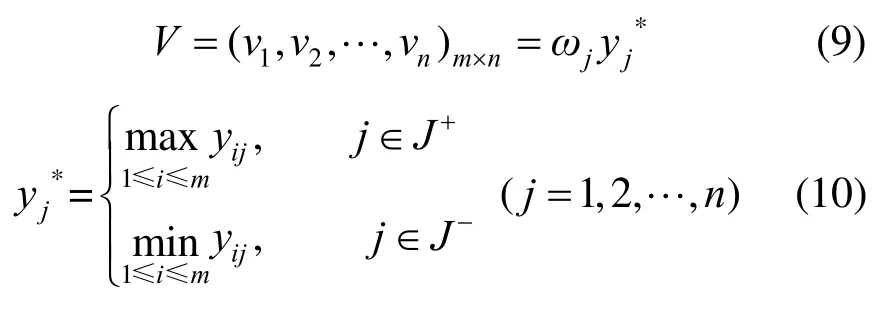
其中,J+为效益型指标;J–为成本型指标。
(5) 计算各对象到理想解距离的平方,记做di,且di越小,越接近最优解,即
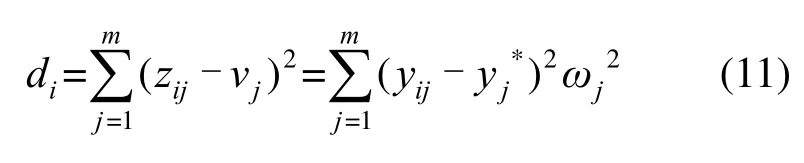
(6) 构造最优化模型为
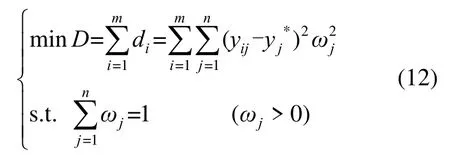
并构造拉格朗日函数进一步求解,即


下面对开启类元件进行计算,根据15名果园作业平台操作员和5名设计人员对启动和停止、紧急情况、正常作业3种工况下各元件的使用次数建立初始决策矩阵X,即
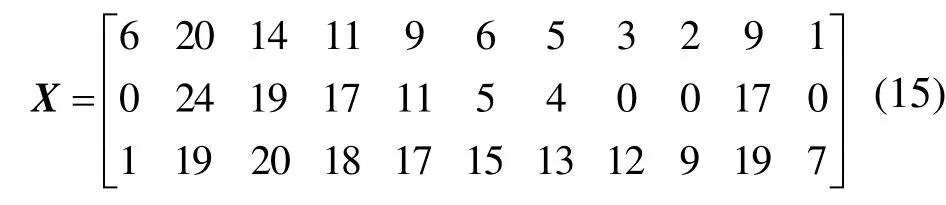
根据专家对上述3种工况重要性进行评估,给出相应权重分别为0.30,0.38,0.32。利用式(8)计算加权标准化矩阵Z,即

最后根据式(14)计算出各元件的权重为W=(0.0068, 0.3641, 0.2896, 0.1642, 0.0549, 0.0177,0.0162, 0.0076, 0.0073, 0.0651, 0.0066)。
类似的,可以用同样方法计算仪表类元件和指示灯类元件的权重值,见表9。
3.2 操控台人机界面优化设计及评价
依据国家标准50百分位男性人体尺寸和立姿作业空间、作业高度、控制台作业面布置区域等数据分析,操控台的重要元件应置于地面以上1 100~1 250 mm,视距保持在380~760 mm,双眼视野约为60°,垂直视平线以下30°,手-眼配合协调区域半径为266~535 mm内的范围内[16]。视觉元件的屏幕需与垂直线成20°夹角,按键与水平面成35°角。依据表9的综合权重值量化各元件的优先序结果,将应急制动、迈速表、行车状态显示灯等重要元件排放在视野最优、手最容易到达的区域,将行车档杆、油门控制放在最佳操作范围内,将起升、下降4个按钮按移动方向排列在右手易操作的范围内。操控元件本身的大小、形状、颜色、符号等结合人机界面设计原则进行优化设计,最终得出操控台人机界面优化设计方案如图13所示。
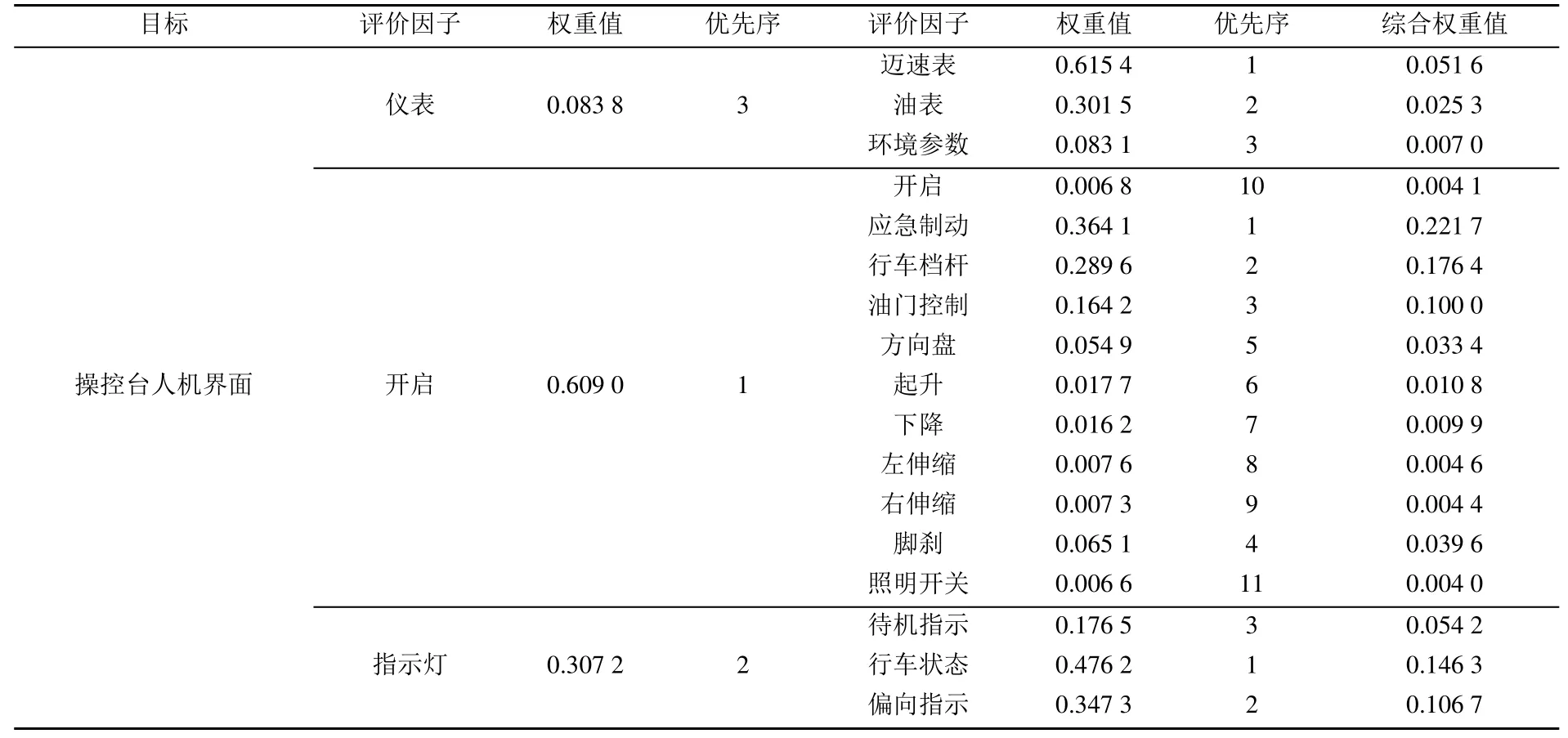
表9 操控台人机界面各元件权重值和优先序Table 9 Weight values and priorities of the components of HMI of the console
为了综合评价优化设计结果,采用RAMSIS客观评价方法和量化主观评价方法对操控台的优化结果进行舒适性评价。首先利用CATIA软件进行操控台的建模,并导入RAMSIS中,采用中国男性50百分位人体模型进行仿真[17],分析得出操控台的尺寸、布局设计结果满足人体模型的可视区域、可达区域要求;以方向盘操作姿态为例进行人体模型的上肢姿态评估结果显示,男性P50人体模型在操作方向盘时上臂比较轻松、舒适。
以合理性、易读性、简洁性为评价指标邀请驾驶员和设计人员各5人,采用0~5分的量化表分别对优化前后的方案打分评价[13]。结果表明,优化设计后的方案平均分高于原有方案,更具有合理性、易读性、简洁性,有利于安全操作。
4 结 论
本文以4类典型果园作业平台为例,总结了果园作业平台的舒适性影响因素,提出了AHP和TOPSIS在果园作业平台舒适性评价、设计中的应用方法,优化后的设计方案提高了果园作业平台的舒适性,为果园农机装备设计提供了参考。
(1) AHP主观评价法应用于果园作业平台舒适性评价,能分析出果园作业平台舒适性的重要影响因素,从而为舒适性优化设计提供指导。
(2) 通过TOPSIS求解出各操控台元件最贴近理想状态的权重值,得出操控台各操作元件的优先顺序;为操控台的人机界面设计提供科学、有效理论依据。
(3) 采用RAMSIS客观和量化主观评价方法对优化后的设计方案进行评价,评价结果显示优化设计后的方案优于原有方案,从而验证AHP和TOPSIS法在果园作业平台舒适性评价、设计中的有效性。
猜你喜欢
中国特种设备安全(2022年1期)2022-04-26
载人航天(2021年5期)2021-11-20
现代仪器与医疗(2021年2期)2021-07-21
电子乐园·下旬刊(2021年3期)2021-02-08
汽车文摘(2019年3期)2019-03-04
电子技术与软件工程(2017年19期)2017-11-09
中学生数理化·中考版(2016年7期)2016-12-07
消费者报道(2016年3期)2016-02-28
汽车维修与保养(2015年8期)2015-04-17
汽车零部件(2014年6期)2014-09-20
