基于DTW算法波形相似性的GIS内隔离开关运行可靠性评估方法研究
2020-11-11 07:19曹双鹏许晓峰
沈阳工程学院学报(自然科学版) 2020年4期
曹双鹏,许晓峰,王 亮,许 东,姚 晔
(1.沈阳工程学院a.研究生部;b.电力学院,辽宁 沈阳 110136;2.国网辽宁省电力有限公司检修分公司,辽宁 沈阳 110003;3.国网辽宁省电力有限公司实业分公司,辽宁 沈阳 110004)
目前,隔离开关的机械性能缺陷的检测方法仍然不能令人满意,需要对隔离开关机械缺陷进行检测诊断。本文提出了一种基于改进动态时间弯曲算法(Dynamic Time Warping,DTW)的行程波形相似性的GIS 内隔离开关运行可靠性评估方法。利用改进DTW 距离衡量GIS 在故障运行时以及非故障运行时的行程曲线之间的相似程度,以区分故障。
1 隔离开关故障曲线特征分析
本文以山东泰开隔离开关厂中的252 kV 角型隔离开关和直线型隔离开关为例,采用角位移传感器采集的拐臂旋转角度经转换得出动触头所走行程,并与标准行程进行比对,以此作为判断隔离开关是否分合闸到位的依据。如图1 所示,横坐标代表时间,纵坐标代表拐臂旋转角度。
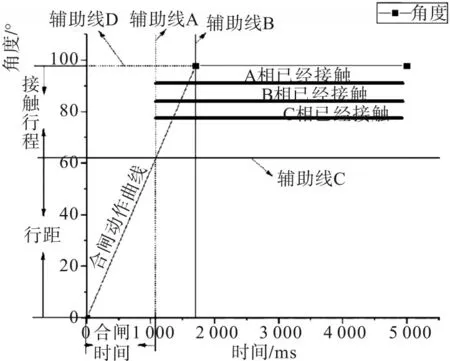
图1 隔离开关特性测试曲线
由图1 可以看出,在隔离开关状态改变时,动触头在电机的驱动下开始运行,动触头与静触头接触时对应的是行程曲线与辅助线C 的交点,这段距离称为开距;在触头接触之后,电机继续转动,动触头接触更加紧密,在曲线中对应的是辅助线C 与辅助线D 之间的距离,该段距离称之为接触行程,动触头的行程等于开距与接触行程的和。通过观察隔离开关机械特性测试曲线,可以直观的看出隔离开关动触头的运动状态。如果在曲线上升的过程中波动比较严重,坡度较为平缓,那么隔离开关内部可能出现摩擦力增大或出现部件卡阻的问题。
除了对比动触头行程数据,还可以通过观察在分合闸过程中每个动作所对应的时间量,进而为故障诊断提供更为有效地判据。如图2 所示,当二次信号状态线分合闸信号回路、分闸信号回路和隔离开关合闸控制回路通电流时,隔离开关触发合闸动作,当动静触头刚接触不久,辅助开关合闸信号回路闭合,发出合闸信号,而隔离开关机构继续转动输出功率,当触碰到行程接点时,断开合闸控制回路,实现隔离开关合闸。
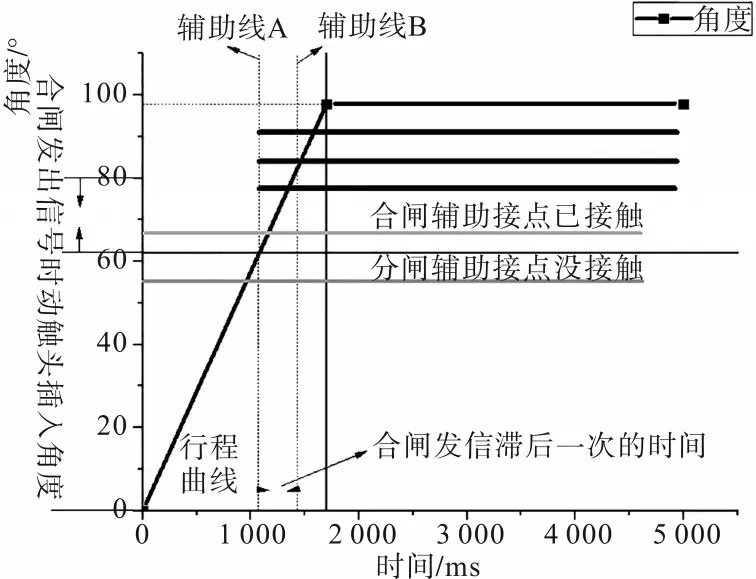
图2 分合闸辅助接点状态
通过合闸辅助接点的变化点对应的时间和行程,可以判断二次信号回路中的辅助开关接点是否正常,或者通过二次回路的状态监测隔离开关机械动作部分是否正常。反之,分闸动作也是同样道理。
综上可知,隔离开关发生故障后其触头行程曲线有明显的差异。采用相关系数法能简单的判定故障区段,但无法判断故障发生的具体位置。由此提出基于动态时间弯曲距离的可靠性评估方法,该方法是通过求解DTW 距离值来衡量两组隔离开关触头行程曲线的相似程度。
2 基于动态时间弯曲距离的状态评估
动态时间弯曲距离是一种度量两个序列相似度的方法,其能够在两个时间序列发生偏移时仍能刻画出两序列相似程度,相比于相关系数法,DTW算法具有较强的耐同步特性。
2.1 DTW算法原理
用DTW 算法实现两个时间序列的相似性度量,它是通过运用动态规划思想来调整两个时间序列元素之间的对应关系,从而得到其最佳弯曲路径并用此路径上的值来度量时间序列相似程度。假定两个时间序列M={m1,m2,…,mp} 和N={n1,n2,…,nq},其维数分别为p和q,为求解其最佳弯曲路径,需构造两序列元素的距离矩阵Tm×n。
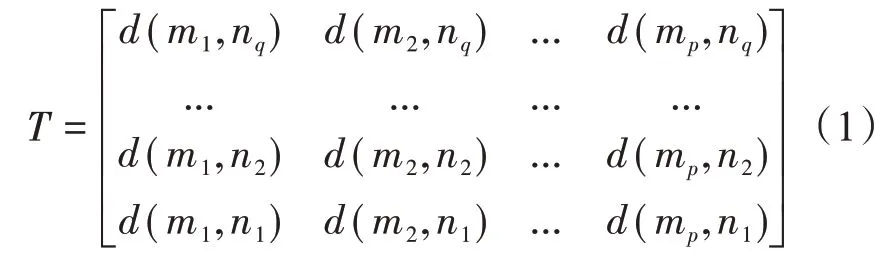
其中,距离元素d(mi,nj)表示点mi和nj之间的匹配关系;矩阵T中所有满足约束条件的弯曲矩阵元素则构成了时间序列M 和N 整体的匹配关系,即弯曲路径。其路径的约束条件为
1)路径的始末位置必须为d(m1,n1)和d(mp,nq)。
2)弯曲路径上的元素必须是沿着相邻点往下进行的,即保证位置连续,距离大小单调增加。
实际上,能够满足以上约束条件的弯曲路径有很多条(假定有X条),需在诸多可能路径中寻找出最优路径,使得该路径上的距离元素之和最小。
采用动态规划寻找最佳时间弯曲路径,可通过计算累积距离矩阵:

使得弯曲路径距离元素之和最小,即:
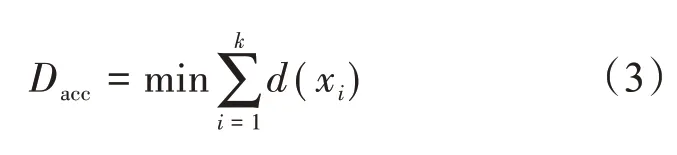
式中,xi为某一路径上的第i个点坐标;d(xi)为坐标对应的距离元素;k∈[max(p,q),m+n-2]表示路径上元素的总数。
2.2 故障行程曲线特征与DTW距离关系
故障发生时,非故障点隔离开关各检测点的触头行程曲线相似。在各检测点求取故障发生时的各区段的DTW 距离归一化值,如图3 所示。图3表明区段的幅值差越大,其DTW 距离值越大;而对于其中一种幅度衰减情况而言,越接近故障点的区段,其求得的DTW 距离值反而越大。
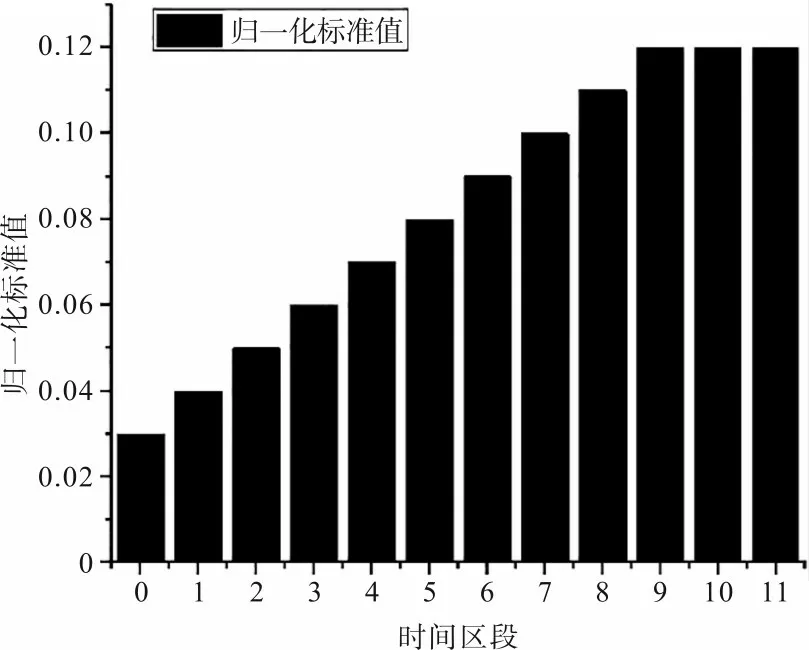
图3 非故障点区段DTW 距离归一化值
故障区段两端的检测点波形不相似,主谐振频率差别较大,幅值差别较大。由图4 可清晰的看出故障区段为6,其DTW 距离归一化值远大于其他区段。

图4 故障时各区段DTW 距离归一化值
DTW 距离是通过度量两个序列各元素间的距离,进而表现这两个序列的相似性。为了说明分合闸状态不同时的DTW 变化,特选取故障隔离开关具有相似特征的检测点数据[11]。求取两组各区段触头行程的DTW 距离归一化值,如图5 所示。当分闸时,DTW 距离归一化值远大于合闸相同时的情况,因此,完全可以通过基于DTW 距离定位判据区分分闸故障或合闸故障。

图5 分合闸状态与DTW 距离值的关系
3 算例仿真
本文以ZF9-252 三工位隔离开关为例。该三工位隔离开关的工作原理是整合了隔离开关和接地开关两者的功能,并由一把刀来完成,一把刀的工作位置某一时刻是唯一的,这样就可以实现机械闭锁,防止主回路带电合地刀。ZF9-252 三工位隔离开关原理示意图如图6所示。
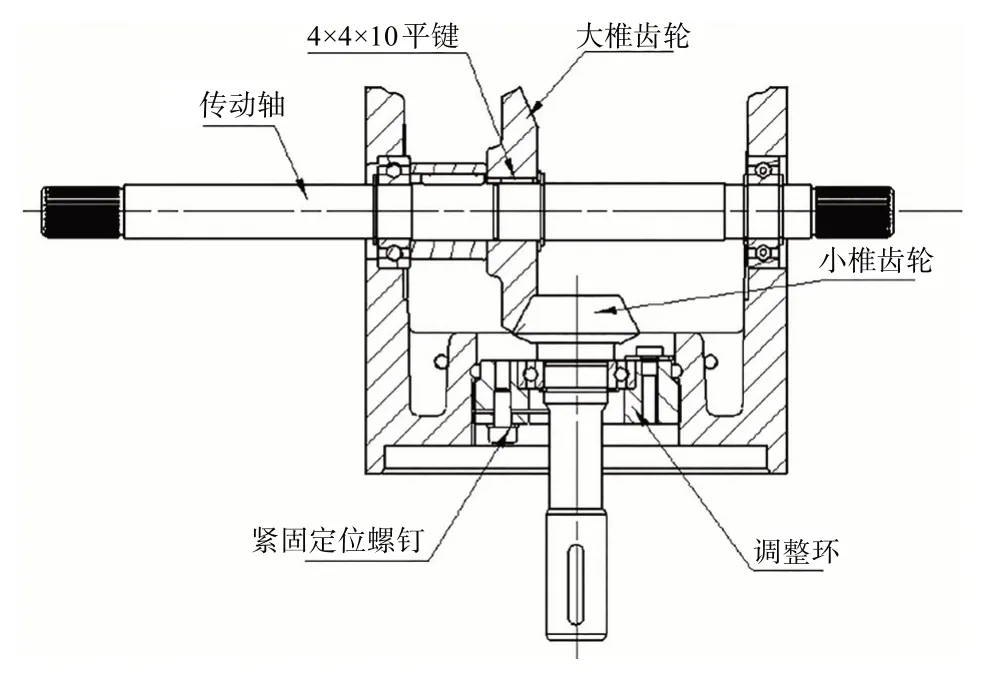
图6 ZF9-252三工位隔离开关原理
该隔离开关主要参数有主轴转动n0=170°±3°,行程L0=145±3 mm,开距k0=125±2 mm。
该隔离开关行程计算方法为
超程:

利用弧长定理,可得小齿轮等效半径为r1=24 cm,大齿轮等效半径为r2=48.96 cm;假设实测主轴转动的角度为n,则触头的行程为

下面以分闸为例,模拟三工位隔离开关在故障时行程曲线归一化值的变化。在分闸过程中,模拟隔离开关在合闸初期触头行进中摩擦力增大,行程曲线会出现抖动上升的波动,分闸故障行程曲线如图7所示。

图7 两组数据曲线对比
通过限定约束条件,采用DTM 算法对比两组曲线得出归一化结果,如图8所示。
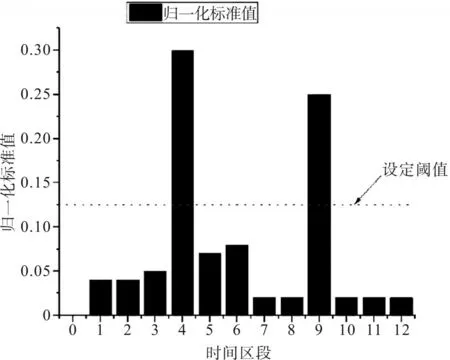
图8 故障曲线归一化对比
根据图8 可以清晰的看出在第4 段以及第9 段归一化的值均大于设定阀值,由此可以得出,在分合闸曲线初期,角度变化较为缓慢,曲线坡度较低,可以判断出动触头在状态改变初期可能存在内拐臂连接处虚位或者是有部件存在卡阻现象;在分合闸曲线中期,角度平稳上升,可以判断出在该区段,隔离开关并无机械故障;在分合闸曲线末期,曲线呈抖动上升趋势,由此可以推断出动静触头接触之后存在较大阻力,造成的原因可能是因为动触头不在箱体中间位置或经过长时间的运行后缺少润滑油。
4 结语
针对故障隔离开关与非故障隔离开关在触头行程曲线上存在明显的不同,本文提出了基于DTW 隔离开关运行可靠性的评估方法。该方法在判断GIS 内隔离开关机械故障时,能够充分的利用故障区段和非故障区段的相似性差异,在特殊故障时(即故障区段和非故障区段相似性特征重叠时),该方法借由自身刻画相似性的优越性,能够将故障特征包含进来,进而扩大故障区段和非故障区段特征差异。由于不同机械状态下的触头行程-时间曲线在时域上有显著差异,因此利用DTW 算法判断不同时域的机械状态。当DTW 用于优化离散曲线时,它必须全面考虑所需的约束条件。该方法在实际工作中,需先采集隔离开关外拐臂旋转角度,形成角度与时间曲线,通过DTW 算法对比采集曲线与经典曲线(也就是测得的无故障运行隔离开关角度与时间曲线)的相似度,如果相似度超过事先的估算阈值则认为该隔离开关存在机械故障,若未超过则认为该隔离开关运行状态良好。通过实验证明,该方法适用于直线型隔离开关、角型隔离开关以及三工位隔离开关的运行可靠性评估。
猜你喜欢
科技与创新(2022年11期)2022-06-14
云南画报(2021年11期)2022-01-18
青海电力(2021年2期)2021-07-21
农村电气化(2021年7期)2021-07-19
电子制作(2021年4期)2021-06-16
设备管理与维修(2020年23期)2021-01-04
水电站机电技术(2019年1期)2019-01-22
铁道通信信号(2018年8期)2018-11-10
铁道通信信号(2018年8期)2018-11-10
铁道通信信号(2016年4期)2016-06-01