
基于STM32的智能皮影戏设备
2020-11-06 02:47王懿品杨斌耿方建华任宇戚本正
物联网技术 2020年10期
王懿品 杨斌 耿 方建华 任宇 戚本正


摘 要:文中针对非物质文化遗产—皮影戏如何融入新时代、如何传承和保护的问题,设计了一套智能皮影戏设备。该设备硬件部分由三支基于STM32的六自由度机械臂及亚克力外壳组成,软件部分利用PC端上位机实现与智能皮影戏设备的连接,再配合声、光实现对皮影戏的还原、记录和保护。首先,使用者利用PC端上位机将每支机械臂的6个舵机根据需要调整出不同角度,并将不同角度自由组合,设计出皮影戏人物的分解动作,将每一场皮影戏需要的动作编成一个动作组,点击运行即可完成表演。实验及调研结果表明,本设备可结合声、光、电完成对皮影戏表演的高度还原,执行过程较为简单,且系统性能稳定,皮影戏录入设备使用方便,受到传承人及大众的一致好评。
关键词:智能皮影戏设备;STM32;上位机;机械臂;非物质文化遗产;皮影戏
中图分类号:TP242;TP368文献标识码:A文章编号:2095-1302(2020)10-00-04
0 引 言
随着科学技术的飞速发展,越来越多的青年人更关注着事物的娱乐价值,而非物质文化遗产。皮影戏因传承人减少、趣味度低等原因正濒临消失[1-2]。
智能设备是当下的热门产品,也是万物互联时代广大群众关注的重点,尤其体现在人们生活水平日益提高,消费重点由柴米油盐、日常起居转移到如何提高生活质量上。据调查,市场上少有专为非物质文化遗产设计的智能设备,智能设备与传统文化相结合是非遗保护的必然趋势[3-4]。
文中设计的基于STM32的智能皮影戏设备是迎合现代社会发展潮流,将传统非物质文化遗产与电子技术、物联网技术、软件开发、机械构造、人机交互等多种技术相结合,用以记录、传承和发扬非物质文化遗产—皮影戏的一种智能设备。该设备在硬件方面做到对皮影戏进行高度还原,也可以通过上位机操控,让更多人亲自体会皮影戏创作的乐趣。
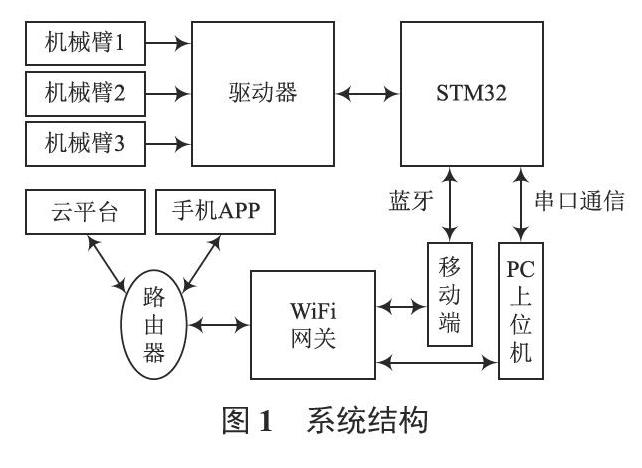
1 系统整体设计
系统整体设计如图1所示。该设备选用STM32单片机作为核心处理器,其每一支机械臂均基于STM32单片机设计,当设备接入电源后,所有舵机复位到指定角度。将皮影的三根挑杆分别固定在机械臂首端特殊设计的卡槽内,通过串口通信与PC端连接、通过蓝牙与移动端连接。通过上位机改变每支机械臂6个舵机的角度,三支机械臂每一帧共同的动作构成一个动作组,通过使用者编码的不同动作组完成皮影戏表演。
2 机械结构设计
本设备内部由三支六自由度的机械臂、皮影箱(63 cm×63 cm×78 cm)、幕布(78 cm×63 cm)、蓝牙播放器及一套LED照明装置构成,设备模型如图2所示。
控制皮影的3支六自由度机械臂使其在二维平面及三维空间内灵活、自由的活动,3支机械臂配合,使皮影人物摆出操作者想要表现的姿势。每个机械手的6個自由度分别为肩关节的旋转和弯曲摆,大臂的弯曲摆,小臂的弯曲摆,手腕和手握的旋转。
机械手的底座固定,连接到底座的肩部可以360°旋转,连接到肩部的手臂可以90°摆动,手腕可以旋转180°或摆动90°,爪子末端可以-90°摆动,爪子部分通过一对齿轮旋转。通过爪子的打开和关闭可以实现夹紧操作。
机械臂的驱动方式为电机驱动,响应速度快,且均为180°电机,便于控制。3个机械臂V字型固定在皮影箱内,使得机械臂上固定的皮影可在幕布上自由活动而不受前后距离的影响。
皮影箱中央为LED照明装置,可高度还原皮影戏真实表演时的灯光状态,使幕布前尽可能呈现出最真实的皮影戏表演,蓝牙播放器为皮影戏表演播放音乐。
3 系统硬件设计
本设备以STM32F103系列芯片为控制核心,该单片机具有高性能、低成本、低功耗的优点,芯片为3.3 V供电。
该单片机共有64个引脚,可以保证机械臂正常运行;有128 KB的闪存存储器,能够在单片机中下载230种不同类型的动作组文件。控制板的正常工作电压范围为6.4~8.4 V,低于6.4 V时蜂鸣器会发出低压报警信号,提醒使用者及时充电。CH340实现了USB转串口与PC端的串口操作。USB接口用于下载程序、动作组及调试机械臂,只需连接电脑打开上位机即可,为调试提供了极大便利。同时也可以通过蓝牙连接手机(下载配套APP),操控机械臂正常运行动作组文件。在控制板上,预留了3.3 V,5 V端口,控制板可为外接设备提供电源[4-7]。系统主要电路如图3所示。
4 系统软件设计
4.1 系统软件流程介绍
皮影表演方式:当选择图形界面操作时,可通过拖动图像界面皮影的各部位按照规定方向进行表演,或通过图像的参数变化,将参数传递给舵机进行表演。软件使用流程如图4所示。
当选择使用舵机表演时,可以选择导入已有动作,或手动改变舵机参数控制舵机进行皮影表演。
从FLASH中对应位置读出动作数据,然后调用ServoSetPluseAndTime函数实现动作运行。这中间还添加有判断数据,用以判断操作是否被正确处理,防止数据出错后的错误动作。为能够执行一个完整的动作组,就需要让程序在执行一个动作后延时该动作的执行时间,当超过执行时间后,则认为该动作执行完毕,开始执行新的动作(函数检查动作组运行标志为真则执行动作组,否则不执行)。
SystemTickCount是程序开始运行到此刻所经过的时间(ms)。当下时间加上动作运行的时间即为动作运行完成的全过程时间。当到达该时间时,则认为动作运行完成或动作组运行完毕。
4.2 系统软件实测
通过鼠标或移动端触摸屏拖动皮影的关节控制皮影进行动作表演。皮影身上共有6个固定点,对应皮影的6个可动部位,ID1~ID6分别对应皮影的右小臂、右大臂、左小臂、左大臂、左腿、右腿。软件界面如图5所示。
每当皮影的部位发生变化后,ID都会从起始点更改为终止点,可通过改变ID的数值进行皮影表演。
皮影每个部分对应不同的按钮,通过不同的串口连接机械臂进行控制。记录皮影不同部位改变时的各部位坐标点,实时调用函数,将参数传递给不同机械臂的舵机,实现图像界面皮影控制。
根据上位机的ID顺序给机械臂的每个舵机标注ID,通过调节舵机位置范围来控制舵机和机械臂运动。软件设置包括在线运行功能、循环运行功能等。
当编辑好皮影的表演动作后,可以将动作文件保存到上位机,或者从上位机导入已编辑好的动作进行在线表演。
5 系统实测运行
将设备接通电源后,各机械臂复位到指定位置,打开在上位机中提前编辑好的动作组,点击运行,经多次测试,设备可以按照动作组的设置进行皮影戏表演,配合实录的正宗皮影戏唱腔和暖黄色灯光,高度还原了传统的皮影戏表演,实现了皮影戏记录和保护的目的。设备实物如图6所示。
6 结 语
本系统设计并实现了一个基于STM32的智能皮影戏设备。该设备可以还原、记录、传承、保护非物质文化遗产—皮影戏。经实地调研及多方考察,该设备能够为传统的皮影戏艺人提供与时代背景相符的保护和记录方法,将非物质文化遗产的保护落在实处。通过借力大数据、云平台、人工智能等技术,非物质文化遗产的保护形式将更加丰富。
注:本文通讯作者为杨斌。
参考文献
[1]杨明骁.中国皮影戏的现状与发展途径[D].上海:上海师范大学,2017.
[2]崔笑.关中皮影戏的文化传承研究[D].西安:西安文理学院,2013.
[3]施雨岑,吴晶,胡浩.文明之光照亮复兴之路:以习近平同志为核心的党中央关心文化和自然遗产保护工作纪实[EB/OL]. [2019-06-09]. www.xinhuanet.com/politics/leaders/2019-06/09/c_1124599401.htm.
[4]隋笑飞,吴晶晶,周玮.留住历史根脉传承中华文明:习近平总书记关心历史文物保护工作纪实[EB/OL].[2015-01-09]. www.xinhuanet.com/politics/2015-01/09/c_1113939176.htm.
[5]周江.STM32單片机原理及硬件电路设计研究[J].数字技术与应用,2015,33(11):1.
[6] YANG L M. CHEN Reduced DOF modular robot configurations [C]//IEEE.International Conference on Control,Automation,Robotics and Vision.Singapore:IEEE,1998.
[7]崔小玲,侯思祖,张璇,等.基于STM32的智能终端的设计与实现[J].电力系统通信,2012,36(5):76-79.
[8]黄晓运,田学友,杨涛,等.基于STM32的智能服务型多功能多足机器人[J].中小企业管理与科技,2018,27(7):143-144.
[9]程欣宇.基于STM32单片机皮影戏机器人的设计与实现[J].数码世界,2016,27(1):32.
[10]李颖卓,梅志辉.基于STM32单片机皮影戏机器人的设计与实现[J].信息技术与信息化,2015,40(9):179-180.
猜你喜欢
大灰狼画报(2022年6期)2022-08-06
小学生优秀作文(低年级)(2020年11期)2020-12-14
小学生优秀作文(低年级)(2018年9期)2018-09-10
计算机教育(2016年7期)2016-11-10
创新作文(小学版)(2016年29期)2016-02-28
