
五峰山长江特大桥北锚碇锚固系统安装定位测量方案及精度分析
2020-11-06 02:53周亚军赵鹏飞周海生
中国水运 2020年8期
关键词:精度
周亚军 赵鹏飞 周海生
摘 要:五峰山长江特大桥北锚碇位于冲积平原上,地势低、沉井基础存在下沉,锚固系统与锚体同步施工,故而给锚固系统安装定位测量增加了难度。本文依据现场实际施工情况,采用了合理的测量方案,并进行了精度分析,可为今后类似项目的施工测量提供一定的参考。
关键词:锚固系统;测量方案;精度;中误差
中图分类号:TV522 文献标识码:A 文章编号:1006—7973(2020)08-0120-03
1引言
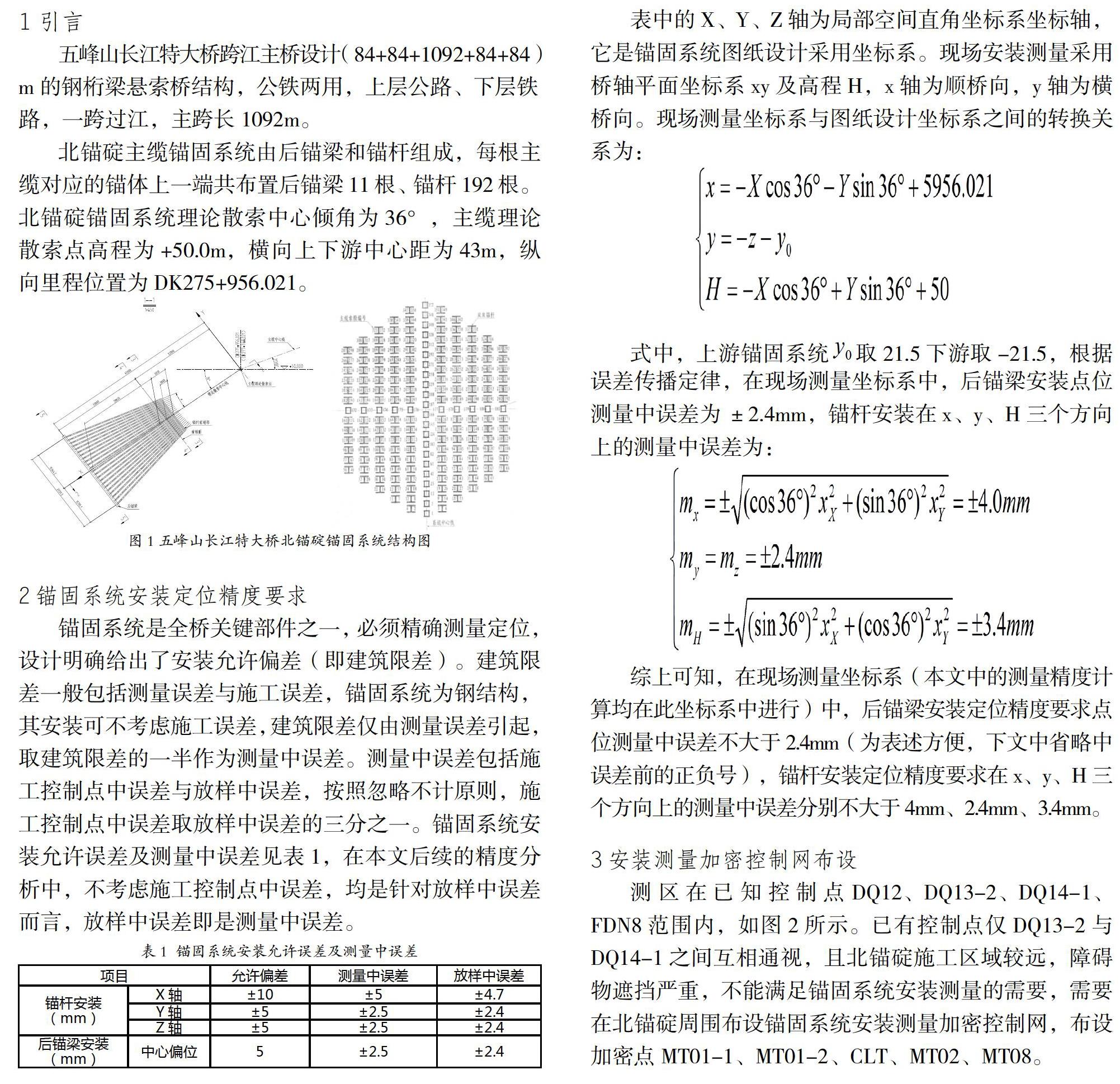
五峰山长江特大桥跨江主桥设计(84+84+1092+84+84)m的钢桁梁悬索桥结构,公铁两用,上层公路、下层铁路,一跨过江,主跨长1092m。
北锚碇主缆锚固系统由后锚梁和锚杆组成,每根主缆对应的锚体上一端共布置后锚梁11根、锚杆192根。北锚碇锚固系统理论散索中心倾角为36°,主缆理论散索点高程为+50.0m,横向上下游中心距为43m,纵向里程位置为DK275+956.021。
2锚固系统安装定位精度要求
锚固系统是全桥关键部件之一,必须精确测量定位,设计明确给出了安装允许偏差(即建筑限差)。建筑限差一般包括测量误差与施工误差,锚固系统为钢结构,其安装可不考虑施工误差,建筑限差仅由测量误差引起,取建筑限差的一半作为测量中误差。测量中误差包括施工控制点中误差与放样中误差,按照忽略不计原则,施工控制点中误差取放样中误差的三分之一。锚固系统安装允许误差及测量中误差见表1,在本文后续的精度分析中,不考虑施工控制点中误差,均是针对放样中误差而言,放样中误差即是测量中误差。
表中的X、Y、Z轴为局部空间直角坐标系坐标轴,它是锚固系统图纸设计采用坐标系。现场安装测量采用桥轴平面坐标系xy及高程H,x轴为顺桥向,y轴为横桥向。现场测量坐标系与图纸设计坐标系之间的转换关系为:
式中,上游锚固系统取21.5下游取-21.5,根据误差传播定律,在现场测量坐标系中,后锚梁安装点位测量中误差为±2.4mm,锚杆安装在x、y、H三个方向上的测量中误差为:
综上可知,在现场测量坐标系(本文中的测量精度计算均在此坐标系中进行)中,后锚梁安装定位精度要求点位测量中误差不大于2.4mm(为表述方便,下文中省略中误差前的正负号),锚杆安装定位精度要求在x、y、H三个方向上的测量中误差分别不大于4mm、2.4mm、3.4mm。
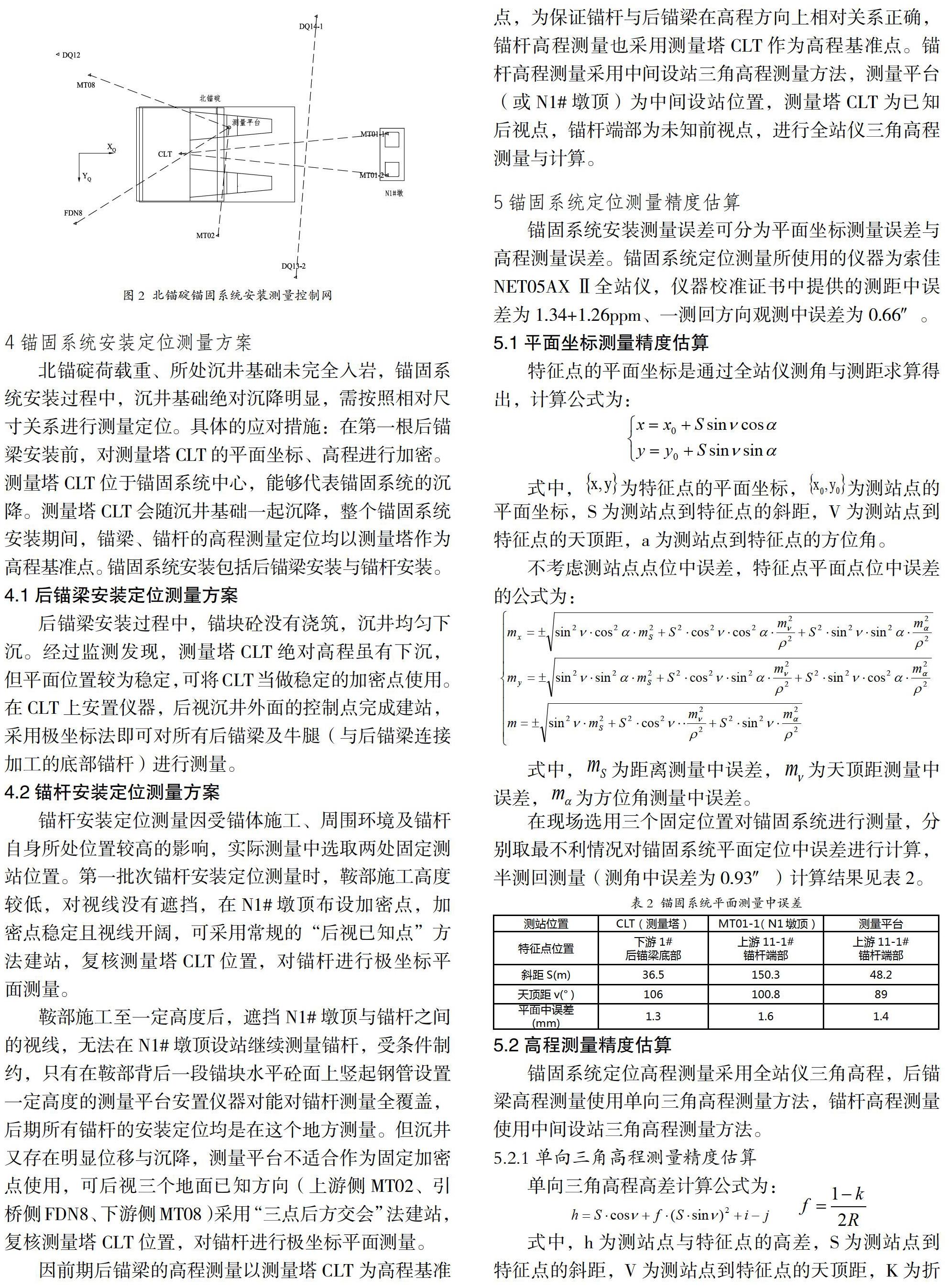
3安装测量加密控制网布设
测区在已知控制点DQ12、DQ13-2、DQ14-1、FDN8范围内,如图2所示。已有控制点仅DQ13-2与DQ14-1之间互相通视,且北锚碇施工区域较远,障碍物遮挡严重,不能满足锚固系统安装测量的需要,需要在北锚碇周围布设锚固系统安装测量加密控制网,布设加密点MT01-1、MT01-2、CLT、MT02、MT08。
4锚固系统安装定位测量方案
北锚碇荷载重、所处沉井基础未完全入岩,锚固系统安装过程中,沉井基础绝对沉降明显,需按照相对尺寸关系进行测量定位。具体的应对措施:在第一根后锚梁安装前,对测量塔CLT的平面坐标、高程进行加密。测量塔CLT位于锚固系统中心,能够代表锚固系统的沉降。测量塔CLT会随沉井基础一起沉降,整个锚固系统安装期间,锚梁、锚杆的高程测量定位均以测量塔作为高程基准点。锚固系统安装包括后锚梁安装与锚杆安装。
4.1后锚梁安装定位测量方案
后锚梁安装过程中,锚块砼没有浇筑,沉井均勻下沉。经过监测发现,测量塔CLT绝对高程虽有下沉,但平面位置较为稳定,可将CLT当做稳定的加密点使用。在CLT上安置仪器,后视沉井外面的控制点完成建站,采用极坐标法即可对所有后锚梁及牛腿(与后锚梁连接加工的底部锚杆)进行测量。
4.2锚杆安装定位测量方案
锚杆安装定位测量因受锚体施工、周围环境及锚杆自身所处位置较高的影响,实际测量中选取两处固定测站位置。第一批次锚杆安装定位测量时,鞍部施工高度较低,对视线没有遮挡,在N1#墩顶布设加密点,加密点稳定且视线开阔,可采用常规的“后视已知点”方法建站,复核测量塔CLT位置,对锚杆进行极坐标平面测量。
鞍部施工至一定高度后,遮挡N1#墩顶与锚杆之间的视线,无法在N1#墩顶设站继续测量锚杆,受条件制约,只有在鞍部背后一段锚块水平砼面上竖起钢管设置一定高度的测量平台安置仪器对能对锚杆测量全覆盖,后期所有锚杆的安装定位均是在这个地方测量。但沉井又存在明显位移与沉降,测量平台不适合作为固定加密点使用,可后视三个地面已知方向(上游侧MT02、引桥侧FDN8、下游侧MT08)采用“三点后方交会”法建站,复核测量塔CLT位置,对锚杆进行极坐标平面测量。
因前期后锚梁的高程测量以测量塔CLT为高程基准点,为保证锚杆与后锚梁在高程方向上相对关系正确,锚杆高程测量也采用测量塔CLT作为高程基准点。锚杆高程测量采用中间设站三角高程测量方法,测量平台(或N1#墩顶)为中间设站位置,测量塔CLT为已知后视点,锚杆端部为未知前视点,进行全站仪三角高程测量与计算。
5锚固系统定位测量精度估算
锚固系统安装测量误差可分为平面坐标测量误差与高程测量误差。锚固系统定位测量所使用的仪器为索佳NET05AXⅡ全站仪,仪器校准证书中提供的测距中误差为1.34+1.26ppm、一测回方向观测中误差为0.66″。
5.1平面坐标测量精度估算
5.2高程测量精度估算
锚固系统定位高程测量采用全站仪三角高程,后锚梁高程测量使用单向三角高程测量方法,锚杆高程测量使用中间设站三角高程测量方法。
5.2.1单向三角高程测量精度估算
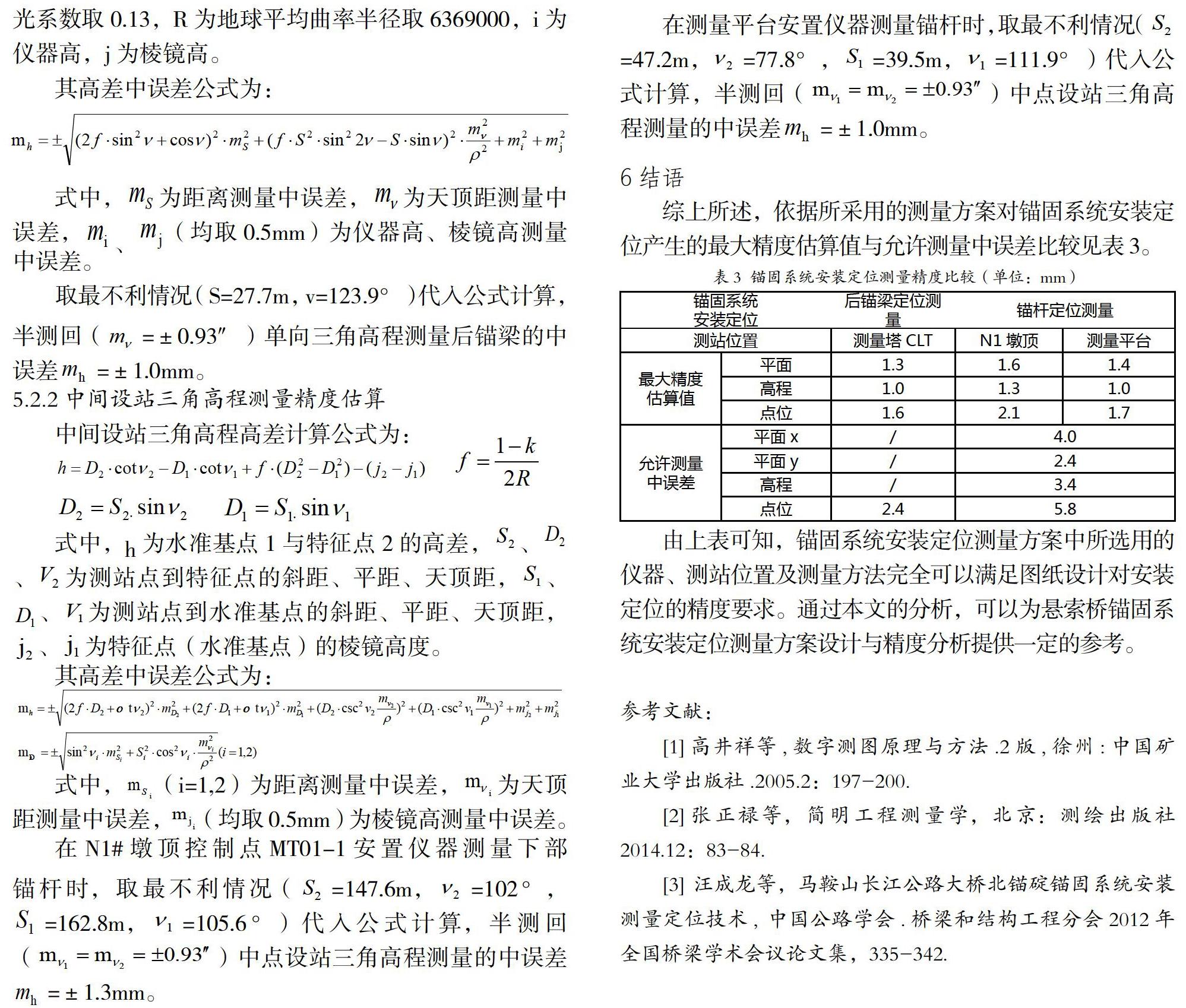
在N1#墩顶控制点MT01-1安置仪器测量下部锚杆时,取最不利情况(=147.6m,=102°,=162.8m,=105.6°)代入公式计算,半测回()中点设站三角高程测量的中误差=±1.3mm。
在测量平台安置仪器测量锚杆时,取最不利情况(=47.2m,=77.8°,=39.5m,=111.9°)代入公式计算,半测回()中点设站三角高程测量的中误差=±1.0mm。
6结语
综上所述,依据所采用的测量方案对锚固系统安装定位产生的最大精度估算值与允许测量中误差比较见表3。
由上表可知,锚固系统安装定位测量方案中所选用的仪器、测站位置及测量方法完全可以满足图纸设计对安装定位的精度要求。通过本文的分析,可以为悬索桥锚固系统安装定位测量方案设计与精度分析提供一定的参考。
参考文献:
[1]高井祥等,数字测图原理与方法.2版,徐州:中国矿业大学出版社.2005.2:197-200.
[2]张正禄等,简明工程测量学,北京:测绘出版社 2014.12:83-84.
[3] 汪成龙等,马鞍山长江公路大桥北锚碇锚固系统安装测量定位技术, 中国公路学会.桥梁和结构工程分会2012年全国桥梁学术会议论文集,335-342.
猜你喜欢
科学与财富(2021年33期)2021-05-10
科技研究·理论版(2021年20期)2021-04-20
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
电子技术与软件工程(2016年24期)2017-02-23
山东工业技术(2016年24期)2017-01-12
科学与财富(2016年18期)2016-12-22
商(2016年27期)2016-10-17
企业导报(2016年9期)2016-05-26
科技视界(2016年3期)2016-02-26
中国信息化·学术版(2013年7期)2013-09-03
