
地面激光三维扫描技术在特高压线路工程中的应用研究
2020-11-04 01:22任立华刘永宽刘安涛
山西电力 2020年5期
任立华 ,康 勇 ,刘永宽 ,刘安涛 ,
(1.中国电建集团河北省电力勘测设计研究院有限公司,河北 石家庄 050031;2.国网河北省电力有限公司沧州供电分公司,河北 沧州 061000)
0 引言
地面三维激光扫描技术是近年来出现的一种新技术,又称实景复制技术,是一种建立在测量学科、仪器光电子学科、图形图像处理等多种学科基础上的综合性技术[1-3]。目前,我国特高压线路正处于建设高峰期,对于输电线路勘测设计要求也越来越高,而三维激光扫描技术能很好地应对这一问题。三维激光扫描技术可获取线路走廊的影像及点云数据,包括高精度数字高程模型(DEM)、数字表面模型(DSM)、数字正射影像图(DOM)以及建(构) 筑物和植被等形态高度信息,满足路径优化、平断面测绘、数字三维平台建立、三维可视化管理、施工验收及运维检修等输电线路相关工作要求,与传统测量方式相比,在质量、管理、效率等方面都得到很大的提高。
1 地面三维激光扫描技术原理与特点
地面三维激光扫描技术核心是高性能的激光测距仪,利用激光测距的原理,一次性获取成千上万个目标点的距离值,并利用其他辅助测量设备确定发射点的位置和姿态,进而获取目标点的三维坐标、反射率和纹理等信息,构建高精度、高分辨率的地表模型及真实三维建模。由于三维激光扫描系统可以密集地获取目标对象的数据点,打破了传统单点测量的测量方式,实现了面体测量的技术革命。
地面三维激光扫描技术具有以下技术特点:第一,扫描速度快,可达每秒几十万测点;第二,扫描精度高,可达到毫米级;第三,使用红外激光,无需灯光照明,可在黑暗条件下获取影像及坐标信息;第四,实现单点测量到面、体式测量的测绘革命;第五,快速获取空间三维数字化信息,方便三维建模,实现物体的三维测量、模拟和分析。
2 地面三维激光扫描技术作业方案的实施
地面三维激光扫描技术利用激光测距原理获得真三维几何结构形状的表面三维信息。外业扫描测量时,选择合适的扫描架站位置尤为重要。扫描架站选择的原则为架站点应空旷,地物尽量单一,易于获取地物点云数据。扫描角度范围可根据物体高度和距离而设定,控制反射棱镜匀速转动;尽量用最少架站数、最少的点云数据量实现物体的点云扫描,减少多余噪声数据。具体作业流程如图1 所示。
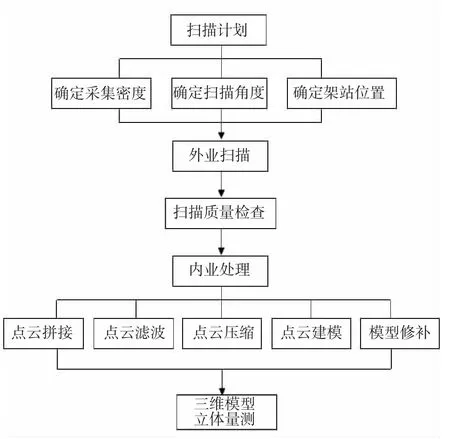
图1 三维激光扫描仪作业流程图
2.1 确定扫描计划
外业扫描前,先根据现场情况制订详细的扫描计划,确定恰当的采样密度,确定扫描角度;根据扫描仪的测程特点,选择合理的物体扫描距离和架站位置等;尽量用最少的扫描站数保证被扫描场景点云数据完整。
2.2 点云外业扫描
按照扫描计划,在预设的架站位置架设仪器。首先新建一个扫描项目文件,把预设的参数输入扫描仪中,根据效果进行调整;然后依次获取三维场景点云数据;扫描结束后,现场分析采集到的数据是否符合要求,进行初步的质量分析和控制。若发现有漏洞,应立即进行补测扫描工作,保证三维场景的完整性和一致性。
2.3 点云内业处理
2.3.1 点云拼接
所谓点云拼接,就是将不同坐标系下的多站点云数据纠正到统一的坐标系下[4]。常用的点云拼接方法有标靶拼接、特征点拼接及控制点拼接3 种。或根据标靶、或根据特征点、或根据控制点,利用多站点云数据间的重叠公共点云,进行点云整体纠正,完成多站点云的匹配拼接。
2.3.2 点云滤波
由于各种原因,三维扫描仪获取的数据可能存在噪声点,这主要是由扫描系统本身的误差、外界引起的偶然误差或扫描对象表面因素产生的误差等造成的。目前,点云滤波常用的方法为高斯滤波、中值滤波、平均滤波、鲁棒滤波、双边滤波等算法或是在此基础上的改进算法。
2.3.3 点云分类
三维激光扫描仪能获取地面、树木、房屋、架空管线等多种类别点云数据,点云分类主要基于点云高程突变或反射率值等进行,根据高程变化、坡度变化、分布形状等特征来判断分类。对于形状规则、空间特征明显的地物,可通过参数设置,利用软件自动提取分类,如建筑物、电力塔等;也可利用基于反射强度、回波次数、地物形状等的算法或算法组合,对点云数据进行人机交互方式辅助分类或自动分类。
2.3.4 模型建立
在点云建模过程中,点云分割是模型构建方面的热点,目前主要有基于边界的分割、基于表面的分割、基于扫描线的分割3 种方法[5]。通常使用平面、自由曲面、球面、圆柱面等几何面进行划分,根据需要把点云分割成不同的集合,以进行线性拟合、曲线拟合等模型构建。可采用Cyclone 软件,采用区域增长算法分割点云数据,或根据模型库的组件进行自动分割,完成曲面拟合,建立目标物的表面模型。
对曲率变化大的复杂点云实体数据进行拟合,即使专业软件处理也很困难,导致曲面数学模型和处理算法难以整体建立,无法准确、真实地表达精细的整体点云实体。针对复杂三维建模,可采用“先分割再拼接”的思路,最后进行整体匹配恢复原始实体的形状[6-7]。
2.4 三维模型立体量测
在点云三维模型中,通过构建辅助线、辅助面等手段,准确获取待求信息,包括导线对地、房屋、道路、电力线等跨越物的安全距离,铁塔与线路元件间的安全距离等,实现线路路径最优化,为线路施工检查验收和运维提供准确的信息,为后续解决方案提供可靠的基础数据支撑。
3 地面三维激光扫描技术的实际应用
在准东—华东±1 100 kV 特高压直流输电工程中,河北省电力勘测设计研究院利用地面三维激光扫描仪ScanStation P40,以100 万个/s 激光点的采集速度,对工程重要区段进行三维激光扫描测量,实现线路场景真三维可视化。工程主要对京广高铁、沪陕高速、京广铁路、500 kV 浉河—嵖岈线路、重要挡间树木等进行了扫描测量,构建了地物真实三维模型。后期项目投运前,对铁塔进行安全距离检查,包括耐张串下倾角度,跳线均压环距耐张串三角联板最小空间距离,软跳线平弧垂,跳线对塔身最小空间距离等的测量。
3.1 交叉跨越测量
地面激光扫描技术在计算架空线路等交叉跨越高度、距离方面有着天然的优势。通过对已建电力线点云数据进行分类处理,可获取该线路的平面位置、导线高度、地线高度、杆塔塔型等信息,并在此基础上,按照设计要求,对其赋予属性,提高勘测设计精度,方便开展后续计算、排塔与展示,实现勘测设计最优化。
3.2 树木最小垂直距离与最小净空测量
在线路建设的树木砍伐方面,尤其是砍伐许可、砍伐量等受限制的情况下,通过构建三维点云模型,可直观地判断需砍伐植被的位置,经空间计算分析,准确计算需砍伐植被的面积,从而避免不必要的植被砍伐,减少线路建设对环境的破坏,实现“不伐整株树木、砍伐零星枝杈”满足工程要求的目标。
施工验收阶段,项目对11 处紧张挡进行了最小垂直距离或最小净空测量检查。通过三维全景扫描,建立林木跨越段点云模型,并进行全站仪距离复测,最后结合检修部门的工测数据,进行对比分析(如表1 所示)。从表1 发现,全站仪、人工测量数值一般要大一些,这是由于这两种方法不容易确定点到线、点到面的空间关系,往往测量的不是空间最短距离。三维激光扫描仪能发挥点云高精度、高密度的特点,再现树木等真实实体,建立可靠、准确的空间关系,测量数值精度更高。
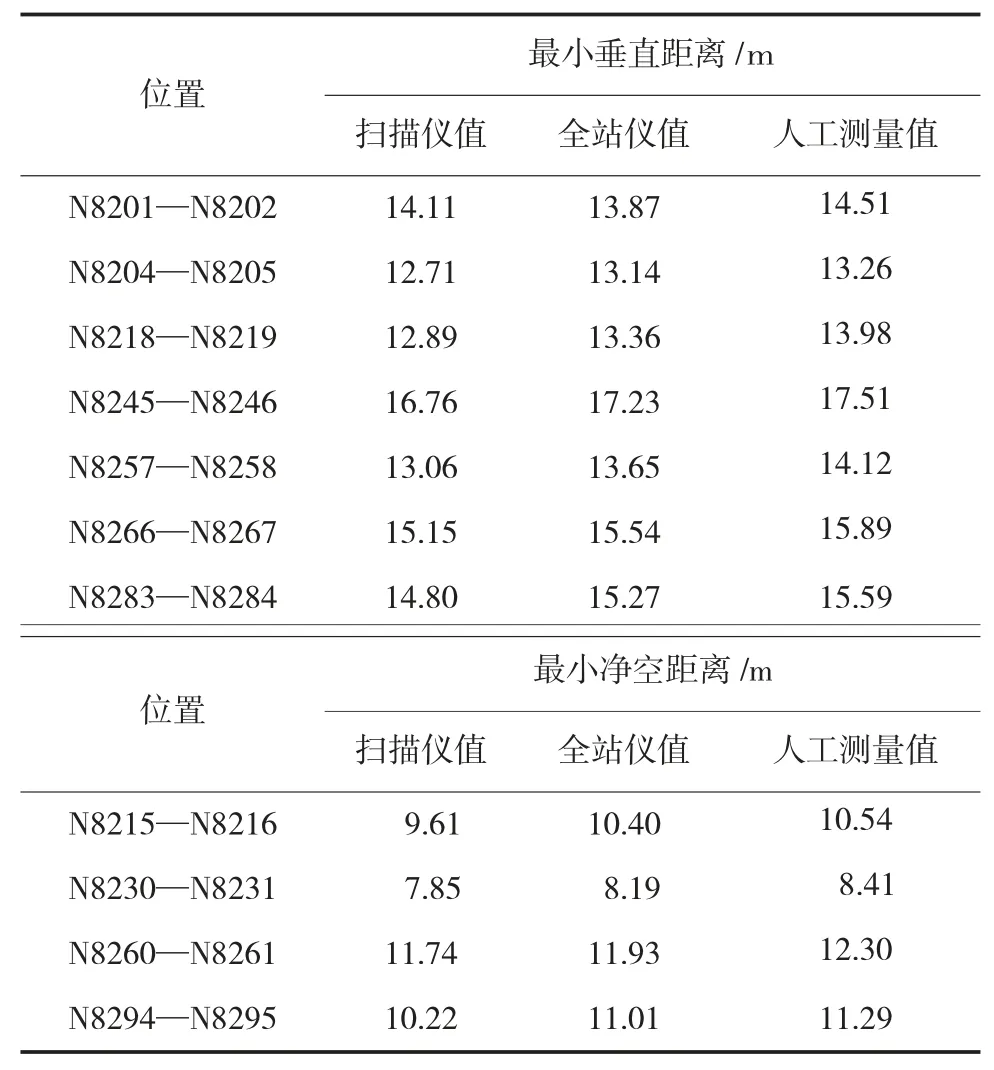
表1 测量数据分析统计
3.3 铁塔安全距离测量
项目投运前,利用三维激光扫描仪与全站仪对铁塔分别进行耐张串下倾角度、跳线均压环距耐张串三角联板最小空间距离、软跳线平弧垂、跳线对塔身最小空间距离、均压环至铁塔安全距离等检查工作,测量部分数据如表2 所示。经对比分析,全站仪在能准确确定点位的情况下,测量结果与三维激光扫描仪非常接近,误差在厘米级;而在点位判断困难的情况下,两者相差较大,这是由于全站仪可进行点到点的量测而无法满足复杂空间距离量测的缘故。
4 结束语
本文结合准东—华东±1 100 kV 特高压直流输电工程,利用地面三维激光扫描技术,对线路重要跨越进行三维激光扫描测量,构建高精度三维场景,相比全站仪、GPS 等传统测量手段,三维激光扫描测量打破了单点测量、建模困难的传统弊端,实现面状测量,发挥其智能程度高、非接触空间测量优势,可快速建立物体的三维点云模型,真实再现线路走廊场景,其距离量测更方便、快捷、可靠,空间距离量测精度达到厘米级,且能轻易实现传统方法很难完成的测量任务,极大地节省了外业工作时间与项目成本。

表2 扫描仪与全站仪安全距离量测对比
三维激光扫描技术可在线路勘测设计、施工验收与运维检修等阶段发挥很好的作用,既可有助于路径优化、线高测量、树木精确砍伐与房屋拆迁统计,又能在铁塔倾斜、安全距离检查等工况分析发挥优势,应用前景广阔。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
新型工业化(2022年5期)2022-06-17
表面工程与再制造(2019年1期)2019-05-11
电子制作(2018年12期)2018-08-01
居业(2017年5期)2017-07-24
现代职业教育·中职中专(2016年4期)2016-10-21
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24
中国动物保健(2015年4期)2015-10-21
现代营销·经营版(2015年3期)2015-04-20
科技视界(2014年11期)2014-12-23
