一种船舶组合导航系统混合误差模型及应用
2020-11-04 09:39庞玺斌梁成程张闯
船海工程 2020年5期
庞玺斌,梁成程,张闯
(大连海事大学 航海学院,辽宁 大连 116026)
支持向量机(support vector machine,SVM)作为一种线性和非线性建模的回归算法已经得到了广泛应用,但是这种方法忽略了可能导致系统整体误差增长的误差派生滤波器。SVM能够基于较少的训练数据定义模型,具有实时性。对过度拟合问题的鲁棒性表现出优越性,并且不需要噪声模型的先验知识。基于此,考虑建立一种混合模型,利用SVM对线性误差的KF输出进行建模,并且应用FOS作为自回归(autoregressive,AR)建模算法对非线性误差进行建模。利用SVM对多个候选集进行检验,得到在GPS失效条件下可以替代KF的最优训练模型。此外,基于AR思想,将计算出的非线性方位误差传递给FOS[1-3]。当GPS失效[4-5]时,算法开始预测阶段运行这两个模型。SVM开始估计线性方位误差取代KF[6-8],而FOS自回归估计方位角的非线性误差。
1 GPS/RISS组合导航
船舶的纵倾角(β)和横摇角(γ)表示为
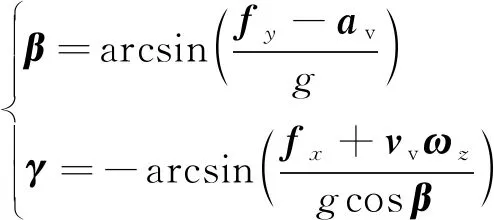
(1)
式中:av为船舶的实际加速度;fx和fy分别为横向加速度量测量和前向加速度量测量;ωz为垂直陀螺仪量测量;g为重力加速度。
为了给出方位角(Az),需要对垂直倾角和地球角速率(ωe)的影响进行补偿,以计算船舶相对于北向的方位角。
(2)
式中:ve为东向速度分量;φ和h分别为纬度和高度,RN为地球椭球曲率半径。速度分别沿东向、北向(vn)和垂向(vu)的分量为
(3)
其中:vv为船舶速度。根据式(4)计算位置的纬度、经度和高度。
(4)
式中:RM为地球椭球曲率的子午线半径。
3D-RISS使用2个加速度计代替陀螺仪来获得纵倾角和横摇角。加速度计产生的误差比陀螺仪小,累积位置误差随时间变化与惯性误差参数之间的关系如下。


(5)
式中:δp(t)为时间t位置误差漂移;δp(t0),δv(t0)为初始速度误差;ba(t0)和δSFa(t0)分别为初始加速度计偏移偏差和换算系数误差,δbg(t0)和δSFg(t0)分别为初始陀螺仪偏移和换算系数误差;δθr,p(t0)和δθA(t0)分别为纵倾/横摇和方位角误差引起的初始非正交误差;v为平均速度。
KF同GPS组合提供减少惯性误差所需的差值,但在GPS失效时,误差仍然存在。非线性误差的估计可以用来限制GPS失效期间误差的快速积累。
由于使用速度传感器读数代替加速度计,计算的速度对RISS有一定的改进。基于加速度计的速度计算引入了与t成比例的速度误差和与t2成比例的位置误差。另一方面,基于速度传感器的速度计算只需一次积分,最终提高位置误差。同样的关系也适用于GPS失效期间。因此,方位角误差是三维RISS中陀螺垂直对准误差的主要来源。误差非线性估计是限制GPS失效期间误差快速积累的方法之一。同时,失效期间KF辅助提供的解提高了KF的估计性能。
KF实现需要对系统误差模型进行辨识。由位置误差(δφ,δλ,δh)、速度误差(δve,δvn,δvu)、方位误差(δAz)和传感器误差(δav,δωz)组成的RISS误差状态矢量。利用RISS方程的Taylor级数近似,将这些误差表示为微分方程。误差模型可以表示为
(6)
(7)
(8)
式中:Δ(·)为相应的高阶误差。
由于所提出的系统具有GPS,因此,其测量可以用于初始化过程。如果船舶在初始化过程中是静止的,则速度矢量初始化为零。另外,在动态条件下,GPS测速量测量用于初始化速度矢量。
姿态对准分为2步。平台通过纵倾角和横摇角的初始化来调平,陀螺罗经用于初始化航向或方位角。当船舶静止时,加速度计通过纵倾和横摇来测量由于水平面倾斜而产生的重力分量。整个IMU的加速计量测量表示为
(9)

由于RISS中仅使用2个加速计,因此,定义纵倾和横摇为
(10)
纵倾和横摇需分开计算,定义方位角为
(11)
2 建模算法
2.1 支持向量机(SVM)
假设训练数据集D={(a1,b1),(a2,b2),…,(al,bl)}⊂Rn×R。其中,ai和bi分别表示输入矢量和输出矢量;下标l为训练集大小。支持向量机回归的目的是识别一个实数函数f(a),用于估计任何输入向量(a)的输出(b)。求解算法基于非线性映射Φ的高维空间F中执行回归,以保证输入向量(a)映射到该空间。
f(a)=WTΦ(a)+c
(12)
式中:Rn→F,W∈F。

(13)
式中:i=1,2,…,l。
用非负Lagrange乘子vi,ηi构造Lagrange函数(L)作为对偶公式,则式(13)可以写为
(14)
基于Karush-Kuhn-Tucker(KKT)条件识别式(14)中的参数v和c,利用核函数K(ai,aj),得到最终的近似解为
(15)
以处理后的数据为模型输入,采用SVM对KF估计的线性方位误差进行建模。选择高斯径向基函数(RBF)作为核函数,主要是因为其精度满足要求,而且易于实现。因此,f(a)表示线性方位误差,ai表示时刻i的模型输入数据集。
2.2 快速正交搜索(FOS)

(16)
FOS通过迭代搜索N个可用的候选基函数,选择M个最显著的函数,降低均方误差(MSE)。FOS算法利用(gram schmid,GS)正交化原理识别从pm(n)函数中生成的正交候选qm(n),并利用系数gm(n)降低量化误差。GS算法产生一个新的正交集,模型为
(17)
FOS通过GS系数的隐式确定降低了正交函数定义所需的时间,GS系数是使用平均时间而不是逐点计算得到的。通过正交展开权重和GS系数识别出原始权值km。当模型误差小于可接受值时,正交函数辨识的FOS迭代过程停止。由于FOS正交候选非直接计算,因此,模型的建立速度非常快。
本文非线性方位误差建模是FOS算法的任务。如图1所示,非线性方位角误差的自相关函数在整个测试轨迹中显示出高相关性。因此,对于非线性方位角误差的建模,采用AR概念使候选解表示先前计算的非线性方位角误差。这种方法降低了使用KF输出作为候选的不确定性。训练瞬间i的非线性方位角误差用y(n)表示,而pm表示由先前的非线性方位角误差(m=1,2,…,i-1)构造的模型候选解。
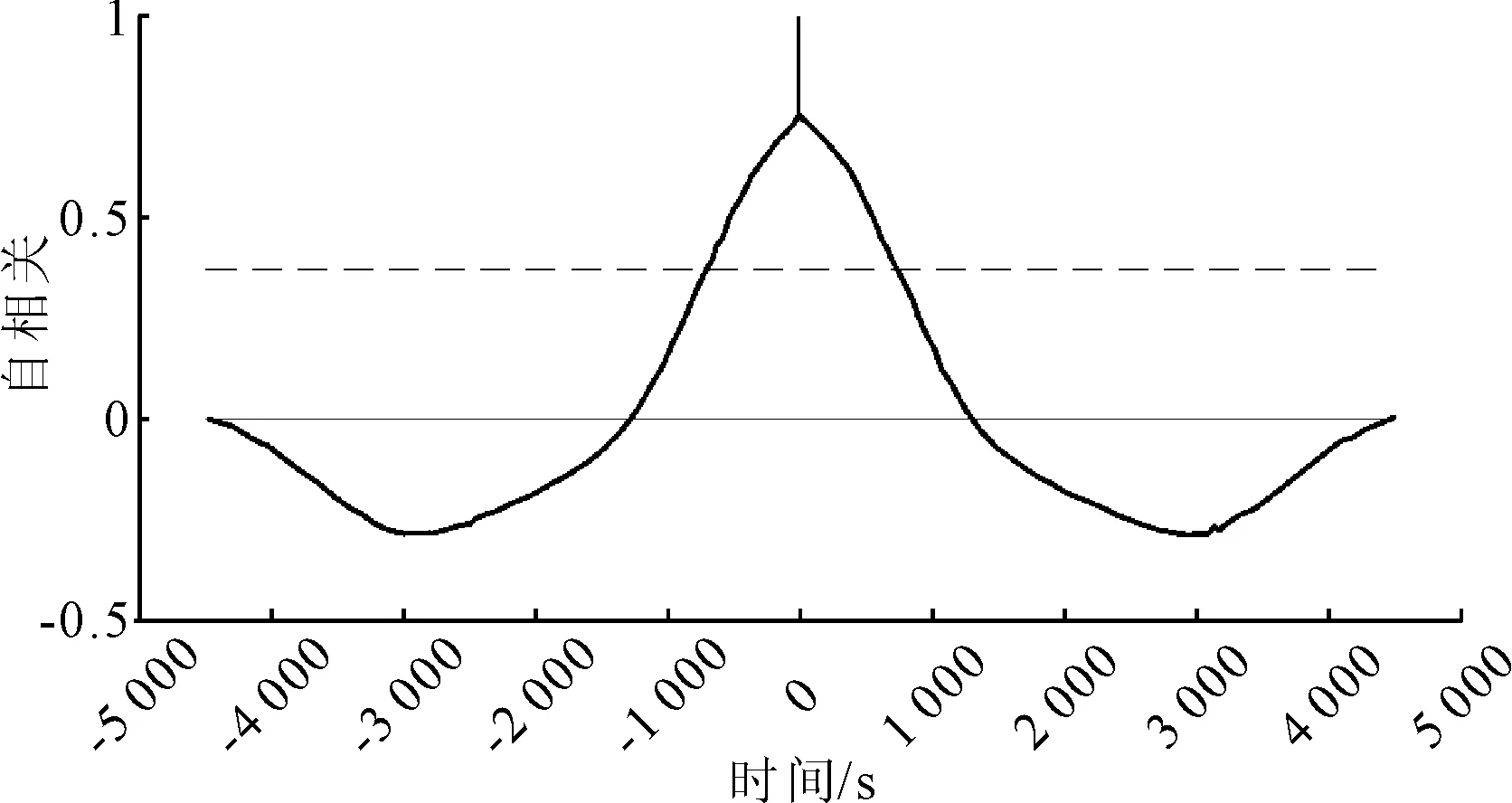
图1 非线性方位角误差自相关函数
3 混合误差模型
基于FOS的强化KF-FOS算法是对非线性方位误差进行建模,此方法使用KF估计的线性误差作为模型的候选。在模型训练过程中,将KF的输出传递给FOS来建立非线性模型。在GPS失效期间,用于估计非线性误差所需的模型线性误差在预测期间通过KF传递,但缺少GPS更新。此方法产生的模型具有影响定位精度的相关不确定性。
为了减小GPS/RISS组合系统的位置误差,提出SVM-FOS混合建模算法,分别对KF输出和方位残余非线性误差进行建模。当GPS失效期间,隔离独立KF输出对最终导航结果的影响。通过利用SVM对GPS辅助时的KF输出进行建模,并在GPS失效时替换KF而实现的。同时,在GPS失效时,基于AR概念利用FOS对非线性方位误差进行建模。考虑到KF输出为线性误差,本方法使得模型能够在GPS失效时不使用KF预测来估计线性和非线性误差。见图2。
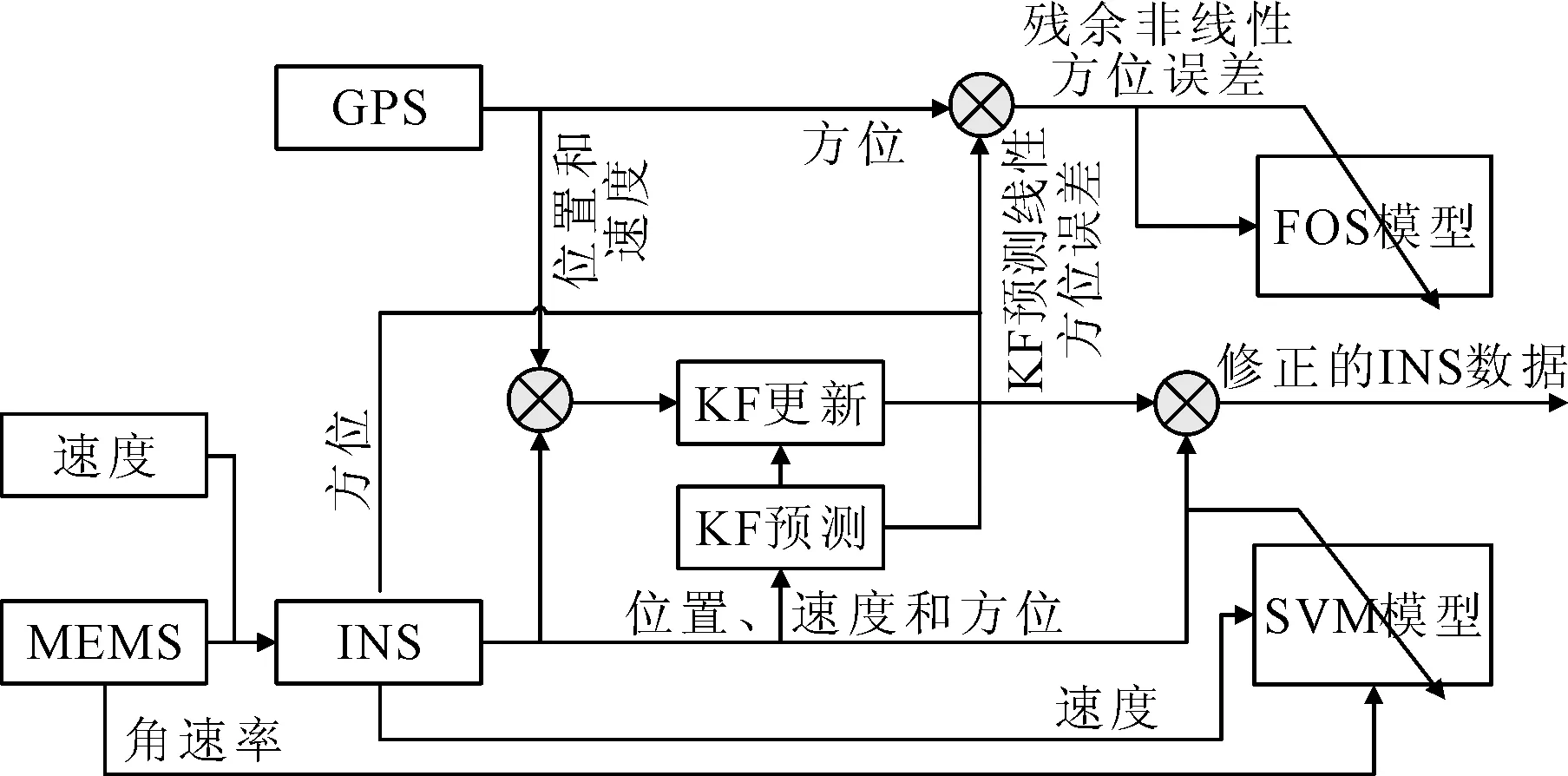
图2 SVM-FOS混合方法原理

(18)


(19)
估计方位将速度传感器量测量传递到另一个解算算法中(图3中的INS解算II)以计算校正的导航数据。由于本算法不依赖于GPS失效的KF输出,因此,KF在没有任何GPS更新的情况下仍预测。在GPS更新过程中,对于传感器误差而言,KF线性化模型取决线性随机模型,并不影响系统精度。在重新捕获GPS辅助信号后,KF预测能够加速收敛。
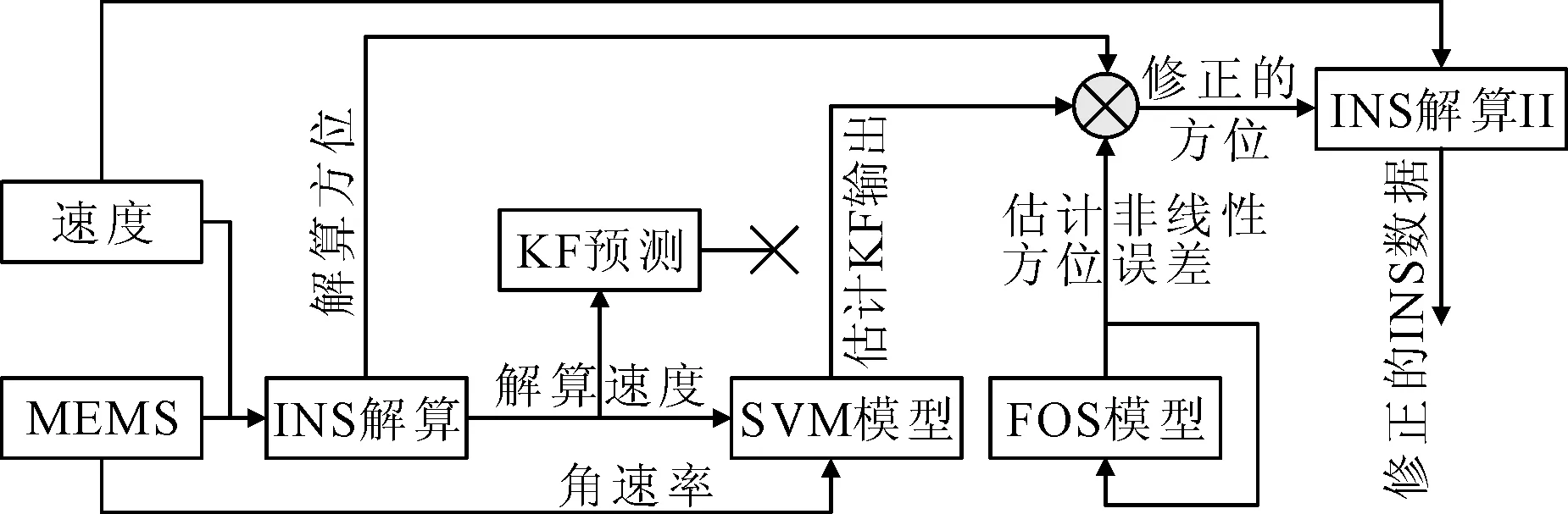
图3 GPS失效时SVM-FOS混合方法
4 仿真结果与实验分析
4.1 仿真结果
结合海试来评估所提出的导航解的性能。实验在大连港附近进行,天气晴朗,风力3级,微浪。从计程仪获取以1 Hz采样率采集的船速数据,从Crossbow MEMS级IMU 100陀螺仪(性能参数见表1)的垂直角速率得到方位量测量。
为了评估系统性能,采用NovAtel提供的G2 Pro-Pack SPAN装置提供参考导航解。通过与参考解比较,验证系统的整体性能。测试轨迹见图4a)。在后处理过程中,模拟8个300 s长的GPS数据丢失,以实现对系统定位精度的评估。模拟其中2、4、6和8号GPS失效时的轨迹,见图4b)。
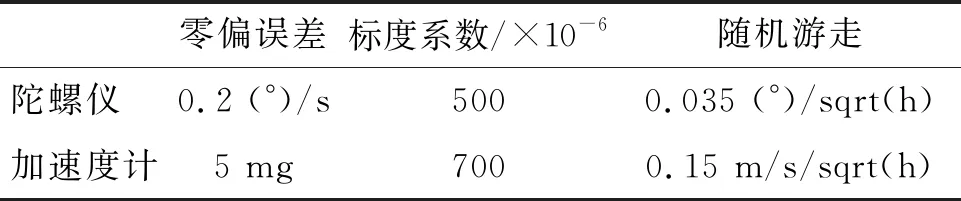
表1 IMU的性能参数
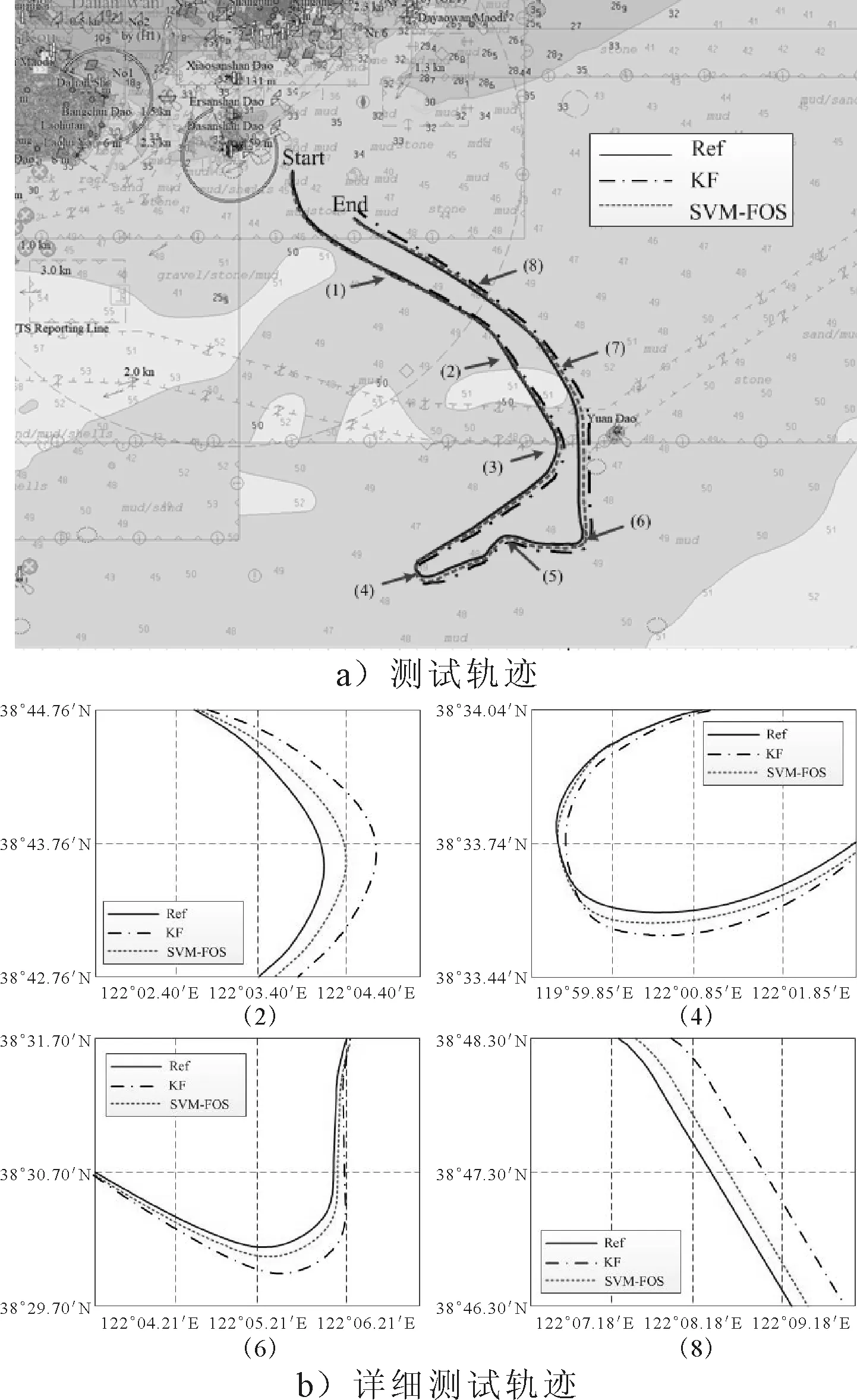
图4 测试轨迹
将提出的SVM-FOS混合方法的估计导航解与文献[16]提出的FOS方法进行比较,还包括每种方法相对于参考解的位置RMSE的比较,结果表明,增强KF-FOS方法提高了方位精度,获得了比仅使用KF更好的性能。
4.2 组合导航系统实船分析
为了在SVM训练过程中得到一个更精确的KF模型,在系统实现中对不同的候选解进行对比。由于SVM是建立在统计学习理论的基础上,因此,加入更多的候选对象目的是开发出更稳定的模型,特别是当这些候选对象描述了更多关于拟合参数的信息。整个训练期间,模拟失效以得出所需的结果。如图5所示,将不同的模型输出与KF输出作为模型数据进行比较,较好的训练结果来自第三模型SVM3。显然,SVM3模型跟踪了模型数据的变化,得到的模型与实际数据的误差最小。因此,SVM3所提供的最佳结果可用于描述线性方位误差的信息量更优的候选集。选择SVM3中的所有候选(ve,vn,wz)是因为其与线性方位角误差有直接和间接的关系。在对SVM3选项进行信任后,选择该选项以供提出的解使用。
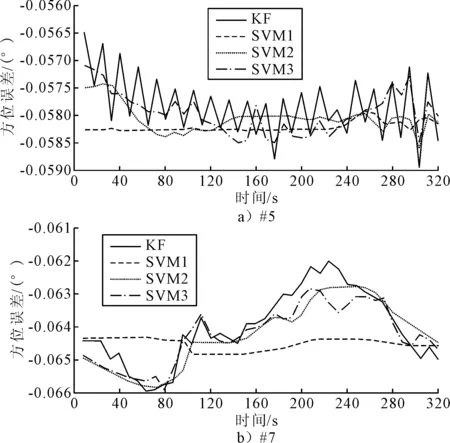
图5 SVM模型训练输出与实际KF输出的比较
将非线性方位误差的2种FOS模型与实际数据进行比较。利用基于AR思想的SVM-FOS方法构造非线性误差模型同以KF估计线性误差作为模型候选的KF-FOS增广方法进行比较。如图6所示,SVM-FOS比KF-FOS具有更好的训练性能,KF-FOS未能选择候选对象识别模型,而SVM-FOS方法成功地定义了模型。比较结果表明,在失效时,所提出的方法能够识别模型候选者,不仅有助于抑制方位误差,而且可以提高定位精度。

图6 FOS不同方法的培训输出
如图7所示,本文提出方法的总体性能与其他基于位置RMSE的方法进行比较。结果表明,SVM-FOS算法在定位精度上取得了较好的效果,提高了导航解性能。提出的算法RMSE可以与增广KF-FOS方法相媲美,对结果进行深入分析表明,该方法较好地抑制了一些峰值误差。
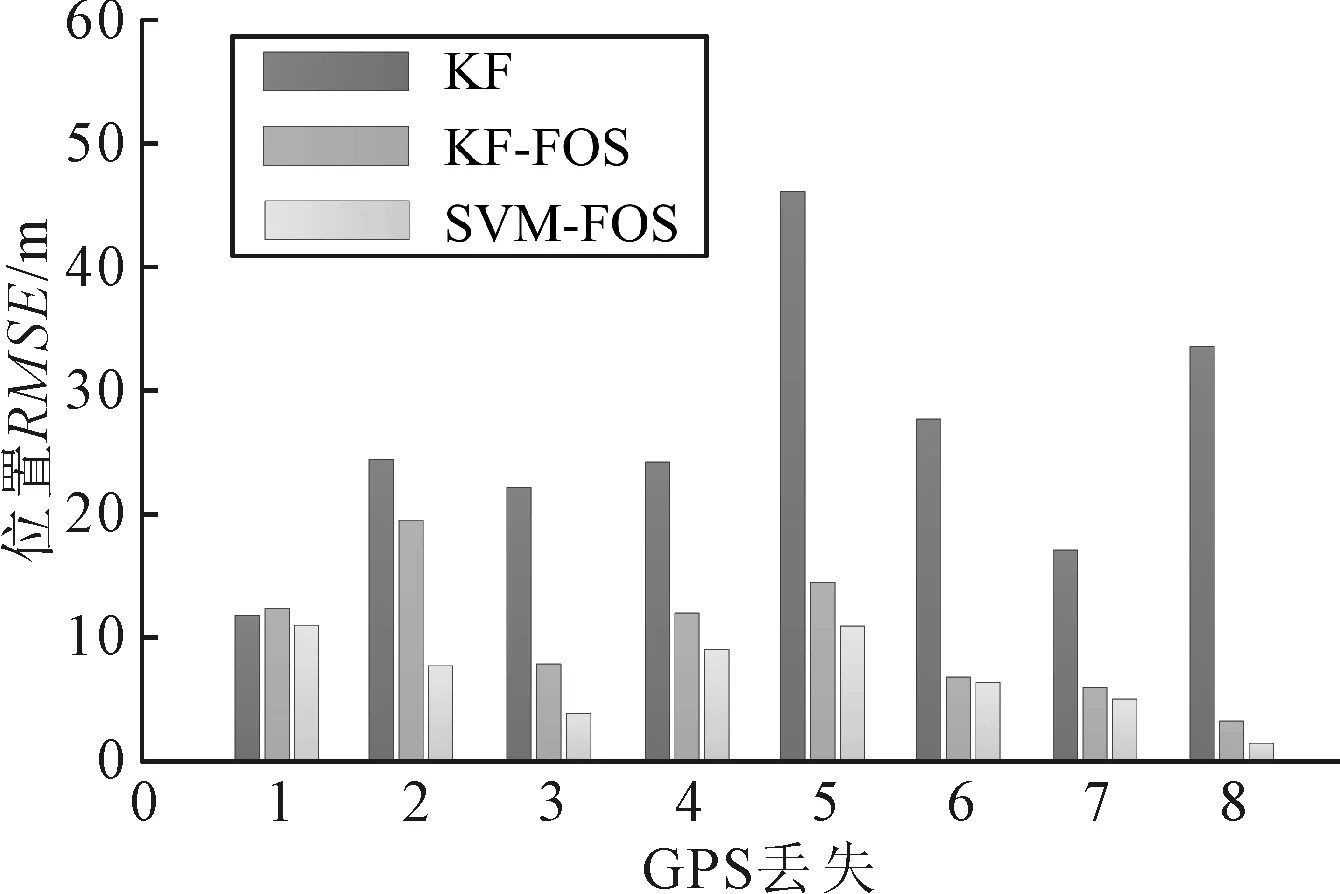
图7 FOS不同方法的培训输出
系统的总体性能表明了方位误差的重要性及其对位置误差的影响,并且在MEMS应用中,表明了非线性残余误差对位置误差的影响。利用MEMS惯性传感器处理常用的KF组合方法导致系统产生漂移。提出的混合SVM-FOS误差模型成功地替代了GPS失效时的KF模型,实现了基于SVM模型的线性误差估计。同时,基于AR思想的FOS给出了非线性方位误差的稳定模型。
混合模型在GPS失效期间获得的平均位置RMSE为6.2 m。将算法与强化KF-FOS进行比较,其平均位置RMSE降低了2.7 m。
GPS失效期间的船舶航行速度见图8。在第1次失效期间,混合建模方法在RMSE上比KF方法降低了约77%。而第6次失效期间,船舶转向,速度发生了变化,使用混合模型方法比KF算法的位置RMSE降低了约94%。此外,增强KF-FOS方法在第2、5、7和8GPS失效时不能有效选择模型的候选解。在GPS失效期间,本文算法能够识别非线性模型候选解,并且位置RMSE比增强KF-FOS方法降低约11%。
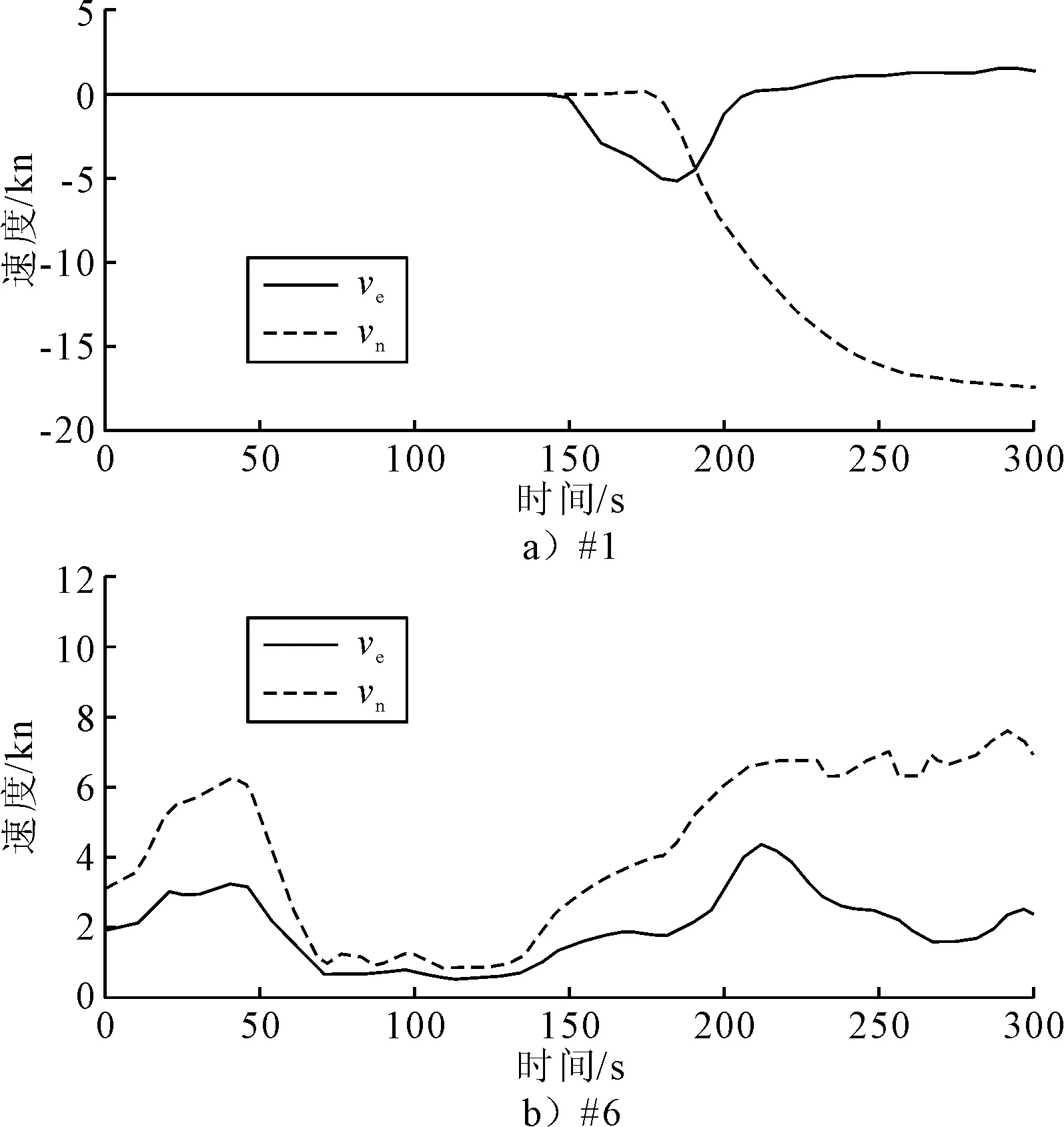
图8 北向和东向速度
5 结论
混合误差模型利用SVM和FOS两种方法来估计并消除GPS故障时MEMS陀螺仪的误差,而无需使用KF输出。成功地将GPS失效期间的位置RMSE最小化。此外,将AR方法和FOS方法结合,在候选的解选择和模型准确性方面都取得了较好的效果。
测试结果与理论预期相符,并证明了该算法在GPS失效期间的良好性能,其位置RMSE降低率约75%。此外,该算法通过获得更好的精度,显示出优于增强KF-FOS融合技术,并且位置RMSE降低了约30%。
猜你喜欢
读与写·教育教学版(2019年9期)2019-10-30
卷宗(2018年14期)2018-06-29
小资CHIC!ELEGANCE(2018年8期)2018-04-03
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
科技创新与应用(2016年9期)2016-05-14
小学生时代·大嘴英语(2015年7期)2015-11-23
山海经(2015年18期)2015-04-19
光学仪器(2014年6期)2015-01-22
为了孩子(孕0~3岁)(2009年6期)2009-07-15
阅读(中年级)(2009年4期)2009-04-16