
基于单片机的侧立轮式双轨山地运输系统★
2020-11-03 02:00张宝宏卞长青吕家乐何永明齐逸飞
山西建筑 2020年21期
张宝宏 卞长青 吕家乐 何永明 齐逸飞
(东北林业大学交通学院,黑龙江 哈尔滨 150040)
0 引言
随着国民经济的快速发展,我国水果的需求量不断激增。目前我国大量水果种植在地形复杂的丘陵地区,在果树种植、维护和水果采收过程中,树苗、肥料、农药等农资和水果的运输仍然以人力运输为主。人力运输劳动强度大,生产效率低,成本高[1],为了解决这些问题,论文研究了侧立轮式双轨山地运输系统。该系统主要用于山地果园中农资的运输,也可应用于森林旅游、自然保护区和湿地生态旅游,还可用于运送消防物资和消防人员,以及森林管护监督人员和科学考察人员[2]。侧立轮式双轨山地运输系统对我国农业机械化的发展及山地运输机械的发展都具有重要的意义。
1 系统总体结构
1.1 系统结构

侧立轮式双轨山地运输系统由轨道子系统、智能小车子系统和远程自动控制子系统组成。轨道子系统由轨道和立柱及其连接件组成,采用双轨侧立方式安装,两条轨道上下平行安装在立柱一侧,立柱处通过支座和连接板连接。上方轨道下侧有齿条,和齿轮配合驱动智能小车。智能小车子系统由蓄电池、电机、控制模块和车厢组成。根据载运量、地形等实际情况可以选择单个或多个车厢。智能小车子系统可接收远程控制子系统发出的指令,并通过单片机控制智能小车按照指令运行。远程自动控制子系统即手持式控制终端,由触屏显示器、处理器和发射天线等组成[3]。系统总体结构见图1。
双轨侧立式山地运输系统的运行通过手持终端和智能小车上的单片机实现[5]。控制系统结构见图2。

控制系统工作时,通过触屏显示器输入控制指令,经处理器处理后再通过天线发送给单片机控制器,最后传送到执行机构,实现前进、后退、加速和减速等操作。
1.2 系统设备
考虑到经济性和实用性,系统设备均采用价格低廉,性价比高的国产设备。该设计方案根据侧立轮式双轨山地运输系统控制模块的特点,综合考虑可靠性和经济性[6],并最大限度地提高控制精度。系统方案各部分组件选择如下:
1)单片机。控制模块采用型号为AT89C51的单片机。该单片机采用高密度存储器制造技术,与工业标准的指令集和输出管脚相兼容。
2)侧立式双轨。钢轨采用50 mm×50 mm规格的Q235镀锌方管。齿条采用3模无淬火齿条,齿距为9.42 mm,齿深6.75 mm。
3)无线数传模块采用亿佰特E62-433T30D。该模块采用全双工点对点高速传输方式,可同时收发数据,同时具有跳频扩频功能,抗干扰能力强。
4)电源状态监控模块选择RFPM系列AFPM3-2AV型号的三路监控模块,该模块具有灵敏度高、耗电省、可靠性好、造价低廉等特点。
5)电动机选择型号为MY1120ZXF的600 W尤奈特永磁直流有刷电机。该电机重量轻,发热少,动力强劲。
6)蓄电池采用骆驼牌型号为6-QWLZ额36 V铅酸电池。该电池续航时间久、使用寿命长,充电快,适用于各种环境。
2 远程单片机自动控制系统设计
2.1 多功能调压程序
单片机自动控制模块中嵌入了多功能调压程序,用来控制电源的输出功率,从而改变电动机转速,实现控制运输车的运行速度。调压控制元件一般采用晶闸管[7],变压器两端的电压通过晶闸管的闭合和断开来调节。晶闸管调压电路由交流电源、晶闸管VT1和VT2及负载RL组成。晶闸管交流调压原理和电压变化如图3a)和图3b)所示。

交流电方向为正时触发VT1闭合,方向为负时触发VT2闭合。如果正负周期均以α移相角触发两个方向的晶闸管,负载端电压的有效值将根据α移相角的变化而变化,从而实现交流调压。
2.2 电压调节电路
电压调节电路由晶闸管驱动电路和同步检测电路组成。晶闸管驱动电路工作过程:单片机发出触发指令号,经过光电隔离元件、晶体管、脉冲变压器进行处理,形成晶闸管触发指令。
同步检测电路由同步变压器、电压比较器和光电隔离器件组成,同步检测电路见图4。
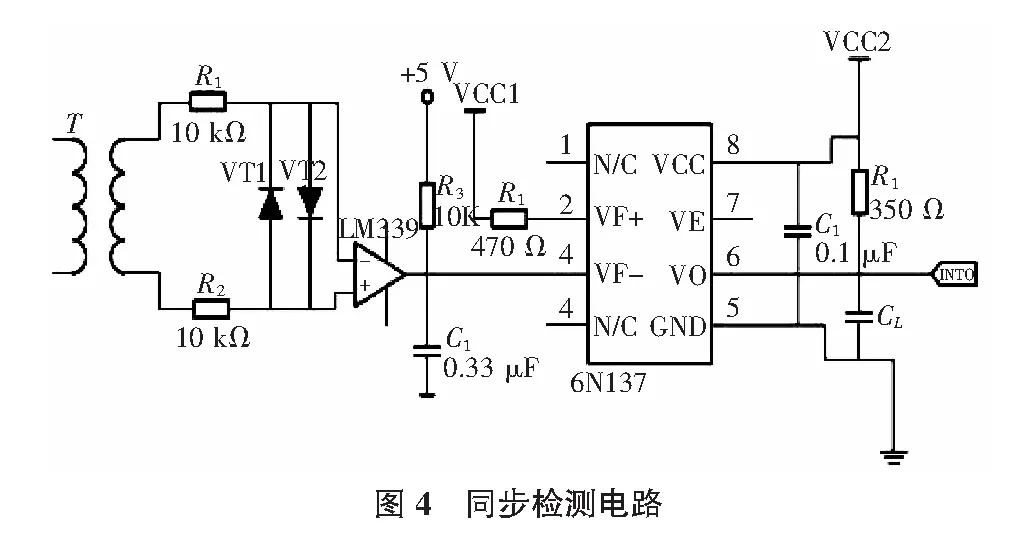
同步检测电路是调压电路的关键,它能够有效控制电压的大小和周期。
3 侧立式双轨运输系统设计
3.1 运输系统空间结构
由侧立式双轨、小车和无线传输模块以及远程单片机自动控制系统等组成。侧立式双轨道设计,小车的平衡性以及防侧翻性能大大提高。小车整体结构、蓄电池和电机左右对称设置。滚轮均采用夹持结构设计,确保小车沿单轨道行驶。
侧立式双轨上下平行安装在立柱一侧,通过支座连接板连接。电动机转动带动齿轮式驱动轮转动,齿轮式驱动轮与带状齿条啮合构成驱动系统。自动控制系统控制电动机的启动、停止以及加减速。
3.2 侧立双轨参数
确定齿轮式驱动轮和齿条式轨道的传动比只与齿轮式驱动轮分度圆直径有关。材料均为42CrMo,经过淬硬处理,齿轮式车轮直径不宜过小,否则影响转矩。也不宜过大,否则会导致齿轮式车轮和齿条式轨道整体体积过大,质量增加,不利于轨道的设计和系统轻量化的要求。齿条式轨道采用GB 1356-C型轮廓,齿条式轨道的分度圆直径为无穷大[8]。实际应用安装过程中,要对主要参数和几何尺寸进行校核,并对强度进行校验。满足应用的前提条件,是建立的工程模型要与实际工程一致,材料选择和尺寸大小与常规齿轮齿条没有区别,主要相关技术指标参数如表1所示。

表1 齿轮、齿条式轮轨主要参数
分度圆直径校验见式(1):
(1)
齿条式轨道宽度校验见式(2):
b2=μd1
(2)
齿轮式车轮齿宽校验见式(3):
b1=b2+10
(3)
其中,m1为齿轮式车轮模数;z1为齿轮式车轮齿数;β为齿轮式车轮螺旋角。
接触应力a的计算方法采用赫兹接触应力计算,见式(4)。
(4)
校核齿面接触疲劳强度计算见式(5)。
(5)
式中:Ze——弹性系数;
Zh——区域系数;
Zm——重合度系数;
u——齿数之比;
K——设计参数。
齿轮式车轮弯曲疲劳强度是指啮合齿根部达到弯曲应力极大点时的强度。齿轮式车轮弯曲疲劳强度验算,一般以齿根点计算弯曲应力是否大于允许弯曲应力来判断齿轮齿条能否满足使用要求。在计算时,要考虑所用的材料、工况及试件的尺寸与试验条件的差异。各种影响因素在计算公式中体现为一系列修正系数,修正模型见式(6)。
(6)
其中,YF为齿形系数;YS为应力修正系数;YA为使用系数;YV为动载系数;KFα为啮间分配系数;KFβ为啮间分布系数。
根据实际齿轮、齿条的参数,对式(6)涉及的多个修正系数进行赋值,可得到齿根弯曲应力为624 MPa。
上述所有计算过程,可通过Adams软件对齿轮式车轮和齿条式轨道的传动进行运动学仿真,验证理论分析的正确性,同时也验证其在实际应用的可行性。
4 齿轮式车轮和齿条式轨道啮合有限元分析
4.1 实体建模
对齿轮式车轮与齿条式轨道啮合实体建模,是采用ABAQUS有限元仿真软件进行齿轮式车轮与齿条式轨道啮合静态仿真的基础。根据《机械设计手册》和相关标准进行三维建模,生成的齿轮和齿条三维模型如图5a),图5b)所示。

该齿轮齿条模型为三维实体模型,其强度是否满足要求需要进行应力云图分析。
4.2 应力云图分析模型
齿轮齿条应力云图分析模型建立过程如下:第一步,生成模型齿廓为直线的齿条,并将车轮的齿廓面作为源接触面;第二步,将轨道齿廓面作为目标接触面,并设置接触面滑动摩擦系数和刚度系数;第三步,划分网格,该步骤对有限元分析的计算速度和精度有较大影响。网格越细,精度越高,但运行的速度越慢。因此需要对分析的关键部位实施细化处理,见图6。
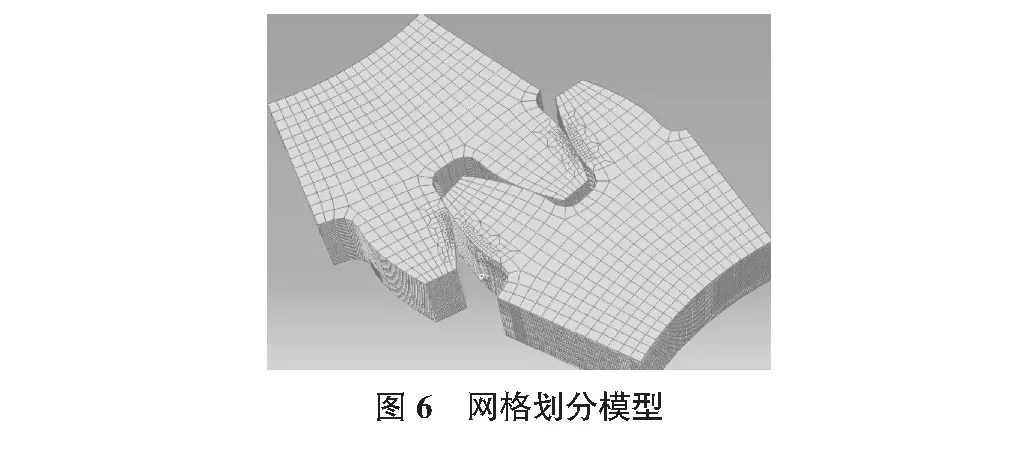
应力云模型建立过程实际上就是确定源接触面和目标接触面,以及网格划分的过程。
4.3 应力云图分析结果
完成应力云图分析模型后,将车轮轴处内表面设置为圆柱形约束,同时约束轴向和径向的位移,使车轮只有绕齿轮回转中心的转动自由度。然后对车轮轴内表面施加等同载荷的扭矩,可通过应力云图来展现应力和应变的分布,从而分析接触面的接触应力和等效应力。
通过分析应力云图能够得到,齿根部分的应力值最大。齿条受拉侧齿根弯曲应力沿齿根不均匀分布,应力最大点出现在靠近齿轮端部的齿根表面。用此方法,齿根最大弯曲应力仅有574 MPa,而按照国家标准的方法进行计算的齿根弯曲应力可达到624 MPa,两种方法的误差为8.71%,小于国际标准10%,符合要求。
5 结语
本文主要设计了侧立轮式双轨山地运输系统的总体结构和控制系统,并用ABAQUS软件建立了驱动模型,并进行了有限元分析。系统建模和有限元分析表明,系统齿轮齿条驱动结构力学性能满足使用和规范的要求。
猜你喜欢
化工设计(2022年2期)2023-01-04
中国储运(2022年11期)2022-11-30
现代信息科技(2022年20期)2022-11-17
工具技术(2022年8期)2022-10-13
航空发动机(2022年3期)2022-10-13
现代机械(2022年4期)2022-09-05
物流技术与应用(2022年8期)2022-08-26
电气传动自动化(2022年1期)2022-03-24
国际太空(2021年8期)2021-11-05
物流技术与应用(2020年4期)2020-05-06
