航空电动机构机械、电气限位的匹配性设计
2020-10-30 06:35肖高忠
设备管理与维修 2020年18期
肖高忠
(航空工业贵阳万江航空机电有限公司,贵州贵阳 550018)
0 引言
作为动力输出源或动作执行单元的航空电动机构,具有可操控性好、响应快、智能化、体积小、重量轻、在飞机上布局方便等优点,随着飞机向多电甚至全电方向的发展,其可替代传统的气动、液压装置等,在航空领域的应用越来越广。
根据输出运动的方式,电动机构分为直线运动和旋转运动两种类型,而后者又可依据其功能分为关断类和调节类两种类型。航空工业贵阳万江航空机电有限公司研制的往复式旋转运动电动机构,是需进行机械限位和电气限位设计的机电一体化设备,多数情况下作为执行单元用于飞机环境控制系统、燃油系统、操纵系统。本文介绍航空旋转类电动机构的结构特点、工作原理、主要构件的作用,重点介绍减速器装置中机械、电气限位装置以及两者之间的关系,根据电动机构的不同功用进行配机械、电气限位匹配性设计,以保证电动机构的成功开发和减少机构故障,提高航空装备的完好率、提升军用飞机作战效能。
1 航空旋转类电动机构的结构和工作原理
1.1 电动机构的结构
电动机构主要由接插件、电机、减速器装置三大部分组成(图1)。其中,接插件主要是上位机给电动机构提供电源和控制信号的结构单元;电机作为电动机构的驱动源、一般采用28 V直流电源,大力矩的电动机构也可采用270 V 的高压直流电源,根据输出力矩大小和转换时间以及寿命和控制精度要求可选择它激式直流电机、永磁直流电机、直流永磁无刷电机或直流伺服电机;减速器装置是电动机构的核心单元,由减速器壳体、传动装置(行星架、齿轮)、机械、电气限位装置、离合器装置及输出轴等组成,主要作用是通过减速放大力矩(图2)。
1.2 工作原理
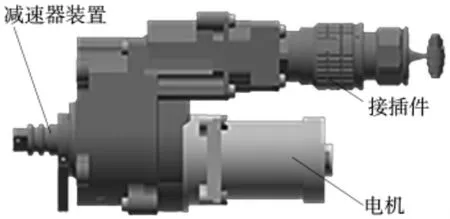
图1 电动机构外部结构
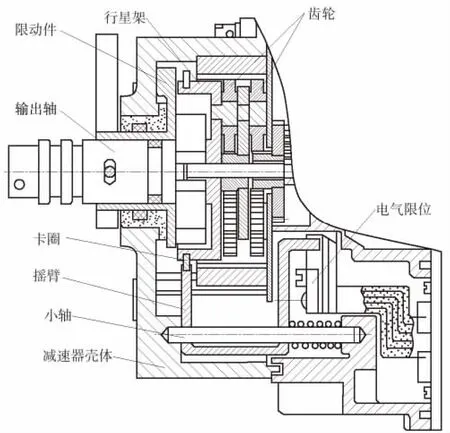
图2 减速器装置内部结构
电动机构主要由电机、减速器装置、离合器装置、电气限位装置、机械限位装置、输出轴等组成。当电源接通时,电机转动带动减速器旋转:关断类电动机构减速器装置中离合器装置的限动件(与输出轴为一体)带动摇臂的按压装置按压电气限位装置中的微动开关切断电源,断电后减速器的传动装置在惯性作用下带动限动件与减速器壳体的机械限位凸台接触,最终实现机械限位,离合器脱开,产品停止工作;调节类电动机构在电动机构输出轴到达机械限位后离合器脱开,减速器中传动装置中限动件(与输出轴为分体式)继续运动带动摇臂的按压装置按压电气限位装置中的微动开关实现电气限位并断电,产品停止工作。
2 机械限位和电气限位装置的结构、工作机理
机械限位和电气限位装置是电动机构的主要组成部分。旋转类航空电动机构在航空领域一般作为控制类或关断类的动力输出执行单元,多为往复式工作制,旋转角度一般为90°。往复式旋转类电动机构机的机械限位装置主要用来保证电动机构输出轴可靠的输出角度,主要由两构件组成,分别为减速器壳体和限动件。电动机构最大可旋转角度为限动件上凸台在减速器壳体两个凸台之间的运动角度,机械限位角度的大小依据实际需求进行设计。
电气限位装置的作用是对电机的电源进行可靠地接通或切断,是其核心控制单元,较机械限位装置结构复杂、设计难度大。电气限位装置分两部分,一部分是电气限位机械转换装置,另一部分为电源的接通和断开装置。机械转换与传动装置进行联动,减速器的行星架转动时带动卡圈同步运动,旋转到一定角度时拨动摇臂沿小轴旋转。电源的接通和断开构件主要由微动开关和按压装置组成,弹簧片铆接在摇臂上构成按压装置,按压装置随摇臂转动按压微动开关的按钮完成电源的切断或接通。
3 机械限位和电气限位装置设计影响因素及匹配性原则
3.1 设计影响因素识别
机械限位装置主要根据电动机构输出轴所需的旋转角度进行设计,结构简单,重点控制好减速器和限动件凸台的设计和加工精度即可。电气限位装置结构相对复杂、构件较多,限位角度计算复杂且误差较大,影响限位角度设计计算误差的因素多,如卡圈的开口角度、摇臂的可旋转角度、按压装置上弹簧片的弹性变形不可精确计算,微动开关的动作行程(开关按钮自由状态到开关内部关弹簧装置完全脱开所运动的位移)的差异等都会影响限位角度的准确性。随着设计手段的不断进步,可采用三维动态仿真进行电气限位角度的设计,模拟弹簧片在不同压力下的变形量以及微动开关在不同动作行程下摇臂的可旋转角度,再根据设计经验进行修正。利用仿真得到的摇臂可旋转角度再加上卡圈和摇臂间空的行程即为电动机构的电气限位角度。
3.2 匹配性设计原则
机械限位和电气限位有两种匹配性设计,一种为先电气限位再机械限位,即电气限位角度小于机械限位角度,产品先切断电源电机停止工作,依靠传动装置的惯性滑移最终实现机械限位,以保证输出轴所要求的输出角度;另一种为先机械限位再电气限位,即机械限位角度小于电气限位角度,电动机构输出轴到达继续限位后,输出轴同离合器装置脱开,传动装置机械旋转带动电气限位按压装置按压微动开关切断电机电源,产品停止工作。具体选择哪一种匹配设计,应依据电动机构所需实现的功能来确定:关断类电动机构转换时间较短,一般选择先电气限位再机械限位的匹配关系;而调节类电动机构转换时间相对较长,一般选择先机械限位再电气限位的匹配关系。
先电气限位再机械限位的电动机构工作原理是,电气限位装置切断电源后电机停止工作,传动装置在惯性作用下带动输出轴继续转动至机械限位凸台,输出轴停止转动,离合器脱开,传动装置继续运动直至能量消耗完毕。此类电动机构转换时间较短,输出轴及传动装置运转角速度大,转动惯性大,惯性滑移量大(可达到30°以上)。如果电气限位角度设计过小甚至电气限位角度大于机械限位角度,因惯性滑移量大,传动装置对减速器壳体的机械限位凸台产生巨大的惯性冲击,对传动装置的运动构件和减速器壳体的限位凸台产生机械损伤,影响产品使用寿命,严重时会导致产品功能丧失。
先机械限位再电气限位的电动机构工作原理为,输出轴到达机械限位后电机继续工作,电动机构输出轴同离合器脱开,传动装置继续运动带动电气限位装置中按压装置按压微动开关切断电源,电机停止工作。此类电动机构转换时间相对较长,输出轴及传动装置运转角速度低、转动惯性小,惯性滑移量相对较小,电机断电后传动装置机械冲击小,对传动构件和减速器壳体机械损伤不大。同时作为调节类电动机构,产品接受上位机的指令随时断电和接通,输出轴到达机械限位的概率较低。
3.3 匹配性设计的注意事项
采取先电气限位再机械限位匹配关系设计的电动机构,如果两者的角度匹配不好会带来以下两个问题:①角度差过大,如果惯性滑移量不够,电动机构的输出角度则达不到规定所需角度,影响控制精度;②如果设计角度相差太小,可能会因电气限位角度计算的误差导致产品的电气限位角度大于机械限位角度,发生电动机构输出轴到位后电机不断电的故障现象。因此,在进行电动机构设计前,应借鉴以往的设计经验和开展同类产品的惯性滑移量的摸底测试工作,在满足电动机构输出轴能到达机械限位位置的条件下,尽可能放大机械限位角度和电气限位角度两者的角度差。另外,在产品实现功能和机械限装置位能得到有效保护的前提下,应尽可能选择先机械限位再电气限位的方案。
4 结束语
随着我国综合实力的不断增强,航空工业势必会得到蓬勃发展,军用飞机朝着多电、全电飞机的发展已经成为必然,电动机构在航空领域的运用会越来越广泛。往复式旋转电动机构的机械限位、电气限位设计匹配性设计非常重要,设计是否合理将直接影响电动机构的工作性能、工作可靠性及产品的质量。在电动机构的设计开发中,应依据其所需实现的功能合理选择两者之间的匹配关系。
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20
哈尔滨轴承(2020年4期)2020-03-17
铁道通信信号(2019年10期)2019-11-25
铁道通信信号(2019年1期)2019-03-21
军事文摘(2018年24期)2018-12-26
猪业科学(2018年4期)2018-05-19
电子制作(2018年2期)2018-04-18
凿岩机械气动工具(2016年2期)2016-11-11
现代商贸工业(2016年35期)2016-04-09
科技与创新(2015年8期)2015-05-06