CTC仿真列车运行模型研究
2020-10-29 09:43王兴利
铁路通信信号工程技术 2020年10期
王兴利
(1.卡斯柯信号有限公司, 上海 200071;2.上海市铁路智能调度指挥系统工程研究中心,上海 200071)
1 概述
铁路调度指挥人员在理论学习和技能训练过程中,行车调度指挥是一个重要环节。CTC仿真实训系统可以给调度指挥人员提供与实际运营行车环境相一致的模拟仿真CTC系统,作为调度指挥人员的培训仿真平台,进行正常和非正常行车条件下的应急演练和仿真培训,可大大提高行车指挥人员对CTC系统掌握的熟练程度,同时可以提高行车指挥人员在突发情况下的应急处理能力,在实际发生突发事件时能做到规范、有序、合理、稳妥地处置。
CTC仿真实训系统整体逻辑结构如图1所示,其中列车运行模拟是其他接口系统的数据来源,列车仿真效果直接影响整个系统的使用效果,而模拟列车速度曲线的计算是列车仿真的核心。

图1 CTC仿真实训系统结构图Fig.1 Framework of CTC simulation and training platform
2 仿真列车运行模型
仿真实训系统需要实时计算仿真列车的速度和位置,也需要根据仿真现场信号条件变化进行运行模式切换,对信号机灯位变化、列控发码的变化和限速光带变化进行实时响应,通过运行模式制动或加速来达到和真实系统一致的效果。
2.1 CTC模拟列车数据结构
模拟列车数据定义如下:


2.2 速度和运行距离计算方法
模拟列车运行采用固定加速度启动或制动,根据《铁路技术管理规范》的规定,120 km/h列车紧急制动距离为800 m,140 km/h列车紧急制动距离为1 100 m,160 km/h列车紧急制动距离为1 400 m,200 km/h列车紧急制动距离为2 000 m,250 km/h列车紧急制动距离为3 200 m,300 km/h列车紧急制动距离为3 800 m,350 km/h列车紧急制动距离为6 500 m。
根据假定启动/制动时间是速度的一次线性函数,如图2所示,线性拟合后可得到经验公式(1)。

其中Δt为从0到vexp速度的加速时间,或从速度vexp到速度为0的制动时间。
列车加速运行时,当前速度V,当前时间t,期望加速到最高速度vexp,前一时刻t0,前一时刻速度v0,如图3所示,按照经验公式(1)可得到当前速度v公式(2):
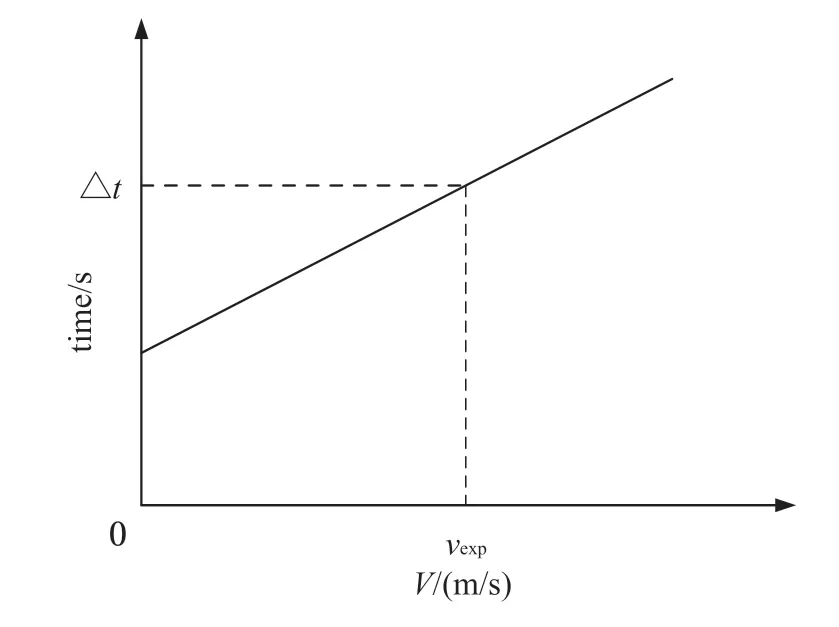
图2 制动时间和速度Fig.2 Curve of braking time with speed
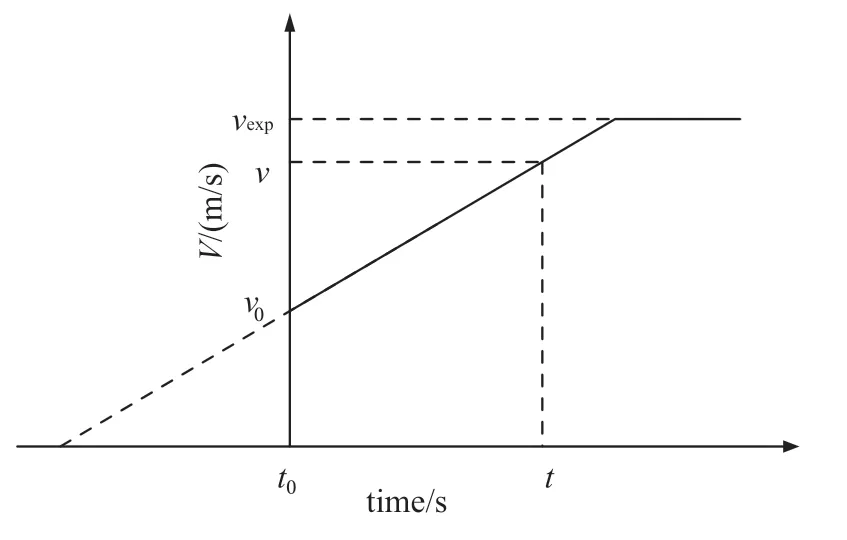
图3 匀加速和时间Fig.3 Curve of constant acceleration with time

也可得到当前时刻相对于前一时刻运行距离L:

列车制动时,制动距离△L和列车加速过程类似,如图4所示,推导制动距离△L公式(4):

其中v为当前速度。
对于前方有限速区段,从当前速度v运行到限速值为vtsr限速区段时,如图5所示,所需要限速制动距离ΔLtsr:
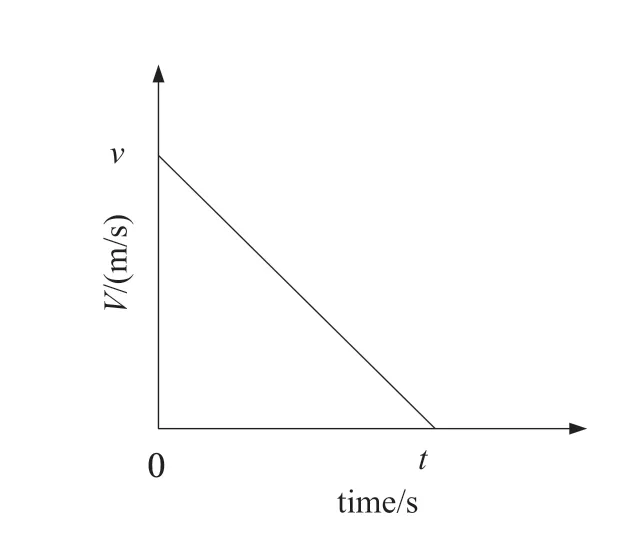
图4 制动时速度和时间Fig.4 Braking speed with time
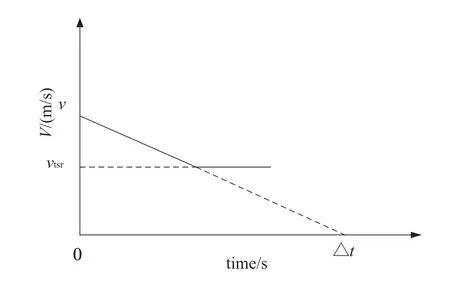
图5 限速制动速度和时间Fig.5 Limited speed braking mode and time

通过以上公式,可以依据前一时刻的速度计算出当前时刻的速度、运行距离,实时更新当前列车的位置和速度,而且可以计算出制动距离和运行到某一限速区段的运行距离,作为列车运行模式切换的依据,比如红灯前停车或低于限速值进入限速区段。
2.3 列车运行模式逻辑
列车根据定义的4种运行模式运行,匀速、加速、制动和紧急制动。
如果当前列车距离前方授权信号点的距离Lma小于制动距离ΔL,则列车进入制动模式;如果当前列车距离前方限速区段的距离Ltsr小于限速制动距离ΔLtsr,列车则进入制动模式。
如果当前列车距离前方授权信号点的距离Lma小于紧急制动距离,则列车进入紧急制动模式 。如果当前列车距离前方限速区段的距离Ltsr小于紧急制动到前方限速值的运行距离,列车则进入紧急制动模式。
一般情况下,加速运行到设计最高速度后,保持匀速运行,具体列车运行模拟切换如图6所示。
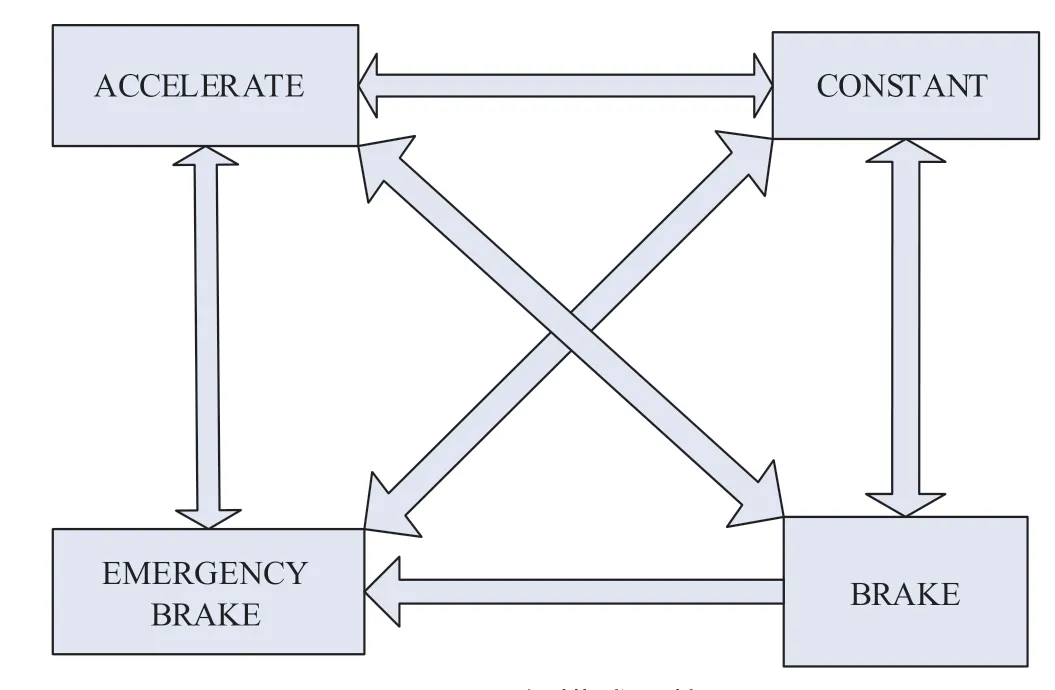
图6 运行模式切换Fig.6 Operation mode switching
3 结束语
紧急制动模式下的一次制动计算模型是最基本的速度曲线模型,在实际使用中,采用二次或多次制动的方法会取得更好的模拟效果,使到开点更准确,更符合实际情况,目前这一方法已广泛应用于CTC仿真实训系统的列车运行模拟仿真,该系统已部署于上海局、南昌局、沈阳局、武汉局、济南局和青藏公司调度所,包括多条高铁线路和既有线线路,经过实际使用和验证,列车运行参数与实际列车运行参数基本一致,给调度指挥人员提供了完全真实的仿真实训系统,具有良好实用意义。
猜你喜欢
铁路计算机应用(2022年5期)2022-06-08
华东交通大学学报(2022年1期)2022-04-06
云南画报(2021年11期)2022-01-18
控制与信息技术(2021年2期)2021-07-23
科技视界(2020年8期)2020-05-18
汽车与安全(2017年11期)2017-12-15
汽车与安全(2016年5期)2016-12-01
新民周刊(2016年20期)2016-05-25
汽车维修与保养(2015年12期)2015-04-18
现代企业(2015年4期)2015-02-28