基于无人机遥感的水质监测信息集成与应用
2020-10-28 13:17:40姚文才
江苏水利 2020年10期
闻 亮,李 胜,陈 清,姚文才
(1.江苏省水文水资源勘测局,江苏 南京 210029;2.南京金水尚阳信息技术有限公司,江苏 南京 210014)
水污染是阻碍人类社会发展和自然环境保护的重要难题,伴随着社会的进步与发展,环境保护的重要性逐渐提高,而水质监测提供的水环境监测数据是有效实施保护措施以及控制水污染的决策依据。因此,实现对湖泊水功能区水体大范围快速、有效的监测对保障国民用水安全、切实实施水资源管理制度以及推进水生态文明建设具有重要意义[1]。目前,我国各地方环境保护部门和水利部门大部分采用的是定点定时的监测模式[2],即在水域内定点定剖面地进行定时监测。但是这种方法存在一定的局限性。如,水质样品基本上都是在固定站在某一固定时间采集获得,很难真实地反映出水质的时空连续性和动态分布的特征[3];无法对以排污口为代表的分散式污染和各类突发性污染的事件进行实时的监控等,这些实际问题在平原河湖的水质监测中尤为突出。在此背景下,改进水环境监测手段、采取更加有效的数据集成管理方法已显得尤为重要。
近年来,随着3S(GIS,RS,GPS)、无人机与遥感等技术的快速发展,产生了多样化的实时水质监测方法。考虑到设备成本、监测效率、应用范围等多种因素,无人机与遥感技术结合产生的无人机遥感技术是目前比较流行的信息采集手段,该方法具有高时效、高时空分辨率、云下低空飞行、高机动性等优势,可以对实现连续性的在线水质监测起重要的辅助作用[4-5]。本文在无人机遥感技术研究的基础上,提出了一种空地协同的多源水质监测信息集成技术,并选择太湖作为实验区域,旨在寻找高效的水质数据采集、集成管理方法,进一步提高水质信息分析结果的准确度与广泛度,为内陆水体采取合适的防治手段提供可靠的决策依据。
1 无人机遥感监测平台
1.1 无人机遥感的优势
遥感技术,即非接触遥感技术,通过其搭载的传感器来捕获地表信息,进而进行数字化提取来获取所需要的产品[6],目前正被广泛应用于水质动态监测领域,包括水质要素(总磷、总氮、浊度等)的参数反演以及浓度空间分布图的建议等,取得了较多的成果[7-9]。但是卫星遥感影像易受大气云层影响,存在影像数据获取周期较长以及时间分辨率约束等问题,无法及时检测水质污染等状况[10]。随着无人机技术的日益普及,无人机遥感技术应运而生。
无人机遥感技术是指以无人驾驶飞行器为搭载平台,搭载数码相机、多光谱成像载荷等数字遥感设备来进行空中拍摄和记录,捕获地表信息,并通过遥感技术对影像数据进行数字化处理来提取所需要的监测信息。与传统的以卫星为平台的航天遥感相比,无人机遥感具有可在云下低空飞行的能力,可以实现云层下成像,弥补了卫星光学遥感和普通航空摄影经常受云层遮挡获取不到影像的缺陷。同时,无人机不仅能够从地面几米高处获取足够高分辨率地面影像(可达到厘米级),还能第一时间获取资源变化数据,实时传输影像到地面终端或在较短时间内完成整个目标区域的调查,其高时效、高时空分辨率特点,也是有固定重访周期且离地几百公里的传统卫星遥感所无法比拟的[11]。此外,机动灵活、体积小、消耗低、监控范围广、运行成本低、能大量节省人工监测时间等也均为小型无人机遥感的优点。无人机遥感作为卫星遥感和有人机航空遥感的有益补充,是多尺度遥感家族中的重要成员,为水质参数的监测提供了新的技术手段。
1.2 监测平台构成及应用
无人机遥感监测平台是指以无人机为飞行平台、以各种光学影像传感器为任务设备的航空遥感信息获取平台,一般由无人机平台、机载系统与地面数据中心三大部分组成[12],具体构成如图1所示。
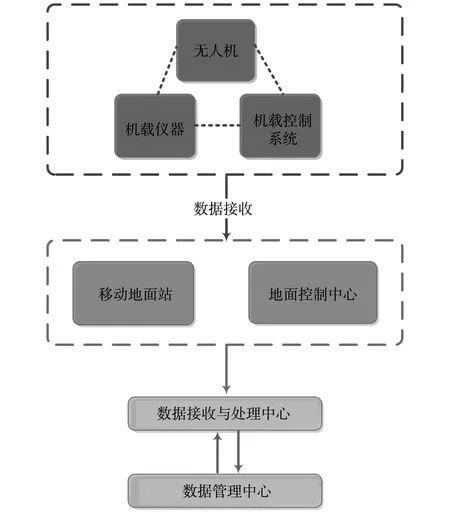
图1 无人机遥感监测平台的构成
其中,无人机属于飞行平台,是进行遥感监测的载体工具;机载系统包括机载仪器和机载控制系统,用于监测信息的采集与传输;地面数据中心包括地面控制站、地面数据接收与处理中心、数据管理中心与数据处理中心。该监测平台可以完成水质遥感信息的自动化、智能化获取,以及水质数据的处理、建模、应用分析。
通过无人机遥感监测平台能够实现在城市复杂电磁环境下的安全飞行,在适应城市河道与内陆湖泊水体的各种复杂环境的基础上进行无死角飞行监测,同时利用机载系统中的各种光学设备可以获取表层水体污染情况、沿湖两岸的各类污染源等信息[13-14]。其具体应用方式为:根据监测需求以及测区地形等资料,在监测区域设置采样点,并对相应的控制点、飞行高度和航摄区域以及航线等进行拟定,利用无人机搭载多光谱传感器等光学设备沿指定线路拍摄监测区域的遥感图像,对所获取的图像进行辐射校正处理得到光谱反射率数据,之后可以根据需求,一方面对获取的区域光谱数据与水质要素(总磷、悬浮物浓度、浊度等)实测数据做Person相关性分析,并拟合构建反演模型,使模型可以将获取的拍摄图片转换成水质要素浓度值(总磷、悬浮物浓度、浊度等);另一方面可以通过常规监测与光谱测试的结合,通过分析藻类等污染物在不同浓度下的光谱曲线及其光谱特性相应于聚集密度的变化规律,实现多光谱成像载荷对于藻类的覆盖范围等指标信息的提取。
2 多源水质监测信息集成体系
无人机遥感作为水质监测的手段之一,在应用中也存在一定的局限性。通过无人机遥感监测可以对水体藻类的覆盖范围与密度分级等进行判断,但难以单单依据监测结果判定藻类的引发因素,需要结合地面调查数据进行进一步分析。而且,为了高度实现无人机巡检遥感的自动化程度,也需要由平台依据对水质实测数据分析得到的重点观察区域来自动划定计算无人机巡检范围。因此,在无人机遥感技术的基础上,通过构建空地协同的水质监测信息集成体系实现多源水质监测信息的集成,进一步提高水质遥感信息的监测与分析质量,为采取合适的防治手段提供可靠的决策依据。
构建空地协同的水质监测信息集成体系,即通过互联技术实现空基(无人机多光谱监测信息)与地基(传统地面监测信息)的集成,包括数据共享、数据联动等,其体系结构及数据传输流程如图2所示。
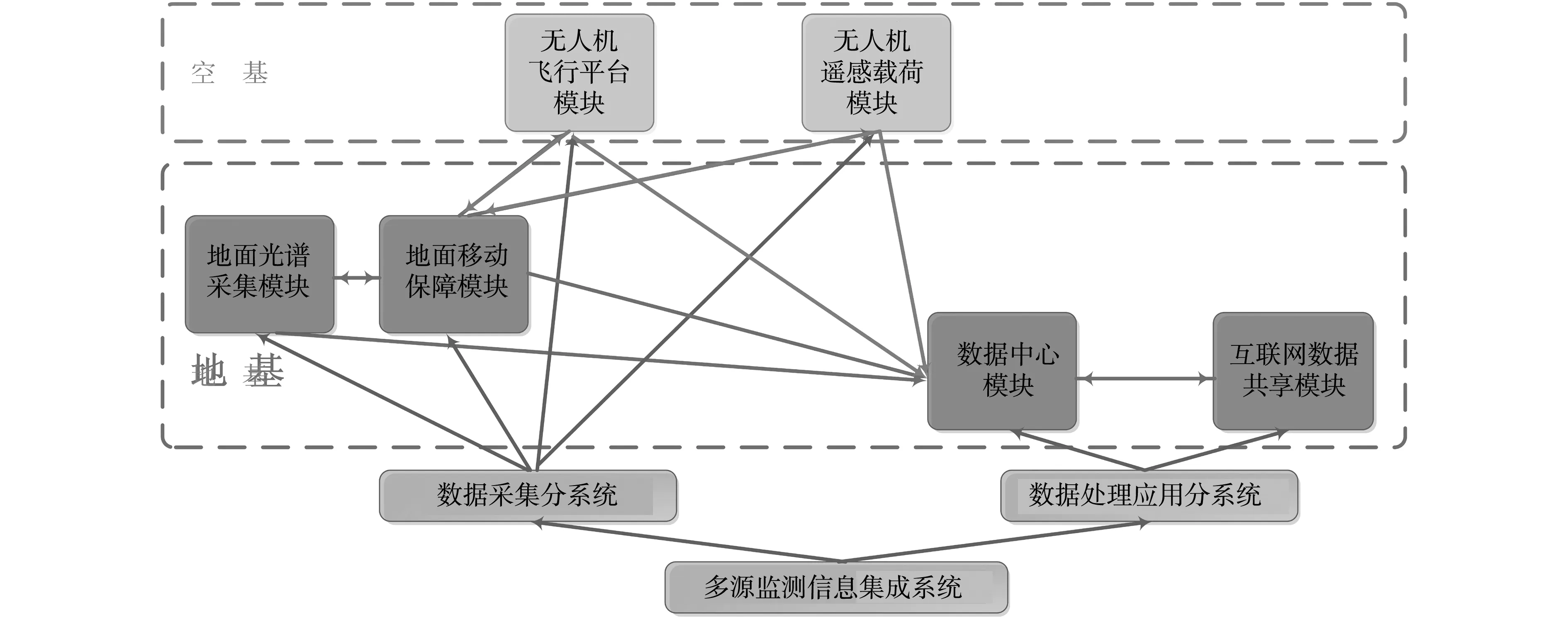
图2 水质监测信息集成体系结构
2.1 空基
包括无人机飞行平台模块和无人机遥感载荷模块。无人机飞行平台模块:搭载有GPS系统、计算机、传感器、伺服作动等飞控设备,确保无人机飞行姿态的稳定与控制;无人机遥感载荷模块:根据水质监测的任务需求,搭载有空中拍照单元、空中摄像单元、多光谱载荷等遥感载荷。
2.2 地基
包括地面光谱采集模块、地面移动保障模块、数据中心模块与互联网数据共享模块。地面光谱采集模块:用于地面光谱实测数据的采集与传输;地面移动保障模块:用于维护数据移动通信设备的正常运行,保证遥感数据的传输与处理;数据中心模块:用于存储、管理采集到的空基与地基遥感数据;互联网数据共享模块:用于地面监测数据、网络气象数据等查询、采集,以及利用互联技术实现地基数据中心模块与网络数据中心的数据共享、交换与联动。
该水质监测信息集成体系利用互联技术对航空(无人机)、地面(人工采样设备、自动监测站等)等多种多尺度全空域监测手段进行信息集成,实现场地辐射定标和交叉定标结合、同步测量气象参数等多源数据的共享与分析。通过建设共享交换数据库(数据采集分系统与数据处理应用分系统),把各类水质数据按定制的交换规则同步推送到共享交换数据库,通过应用服务平台(数据交换接口)实现多源水质监测数据的集成与交换,从而提高无人机遥感数据的辐射质量,进一步保证多尺度监测数据的高精度要求,实现空地协同监测。
3 应用案例分析
3.1 应用区域特点与需求
太湖位于长江三角洲的南缘,流域面积3.69万km2,其中江苏省境内占约53%[15]。作为全国五大淡水湖之一,太湖在淡水供给、水产品养殖等各个方面具有重要的作用,是长江三角洲地区的重要水源地。近10多年来,随着太湖地区经济的快速发展,太湖水体受到了不同程度的污染,尤其是水体富营养化程度日益严重,如太湖北部的梅粱湾湖区暴发过的大规模的蓝藻水华现象,为当地的生产和生活造成了非常大的影响,为此内陆水体的监测和治理得到了越来越多的重视[16]。江苏省到2011年已完成太湖防治工程1 050个,根据国家防治太湖的总体方案及江苏省制订的实施方案,到2020年,江苏共要实施近1 800个太湖防治项目。除水体防治工程外,太湖水质监测也是重要环节,湖泊和河流的监测不仅可以帮助更好地理解环境变化对淡水生态系统的影响,而且能够为环境预测提供丰富的信息。因此,提高太湖水体监测的范围和效率成为当前的重要需求。
目前太湖的水体监测和湖泛巡查单纯依靠船只巡湖模式进行定点定期现场采样,采集来源于手段过于单一化,且巡查过程中的水质信息采集标准化程度低等,导致太湖水体监测工作存在着水质信息源头工作复杂度高且水质信息处理、管理模式封闭而复杂的问题。在此背景下,改进水环境监测手段,采取更加有效的数据采集、集成管理方法已显得尤为重要。鉴于太湖的水质情况与藻类监测需求,参照《水质采样方案设计技术规定》,采用本文提出的基于无人机遥感的水质监测信息集成体系实现多源水质监测数据的获取与同步分析。
3.2 无人机的选型及飞行
考虑到太湖区域的地形地貌特征,选择小型无人机为飞行平台,搭载多光谱相机,低空飞行获取小范围、高分辨率、高覆盖率的多光谱图像。其中,考虑到国内太湖蓝藻卫星遥感监测中公认的特征波段范围[17],多光谱相机选用的是美国Mica Sense公司生产的Mica Sense Red Edge。无人机的飞行控制器采用全套惯性传感器,包括磁场传感器、陀螺仪、三维加速传感器等,拥有精准的控制能力,负责处理接入信号,完成航向控制,保障飞行器稳定飞行,并控制相机吊架以及相机快门等,其主要性能指标如表1所示。
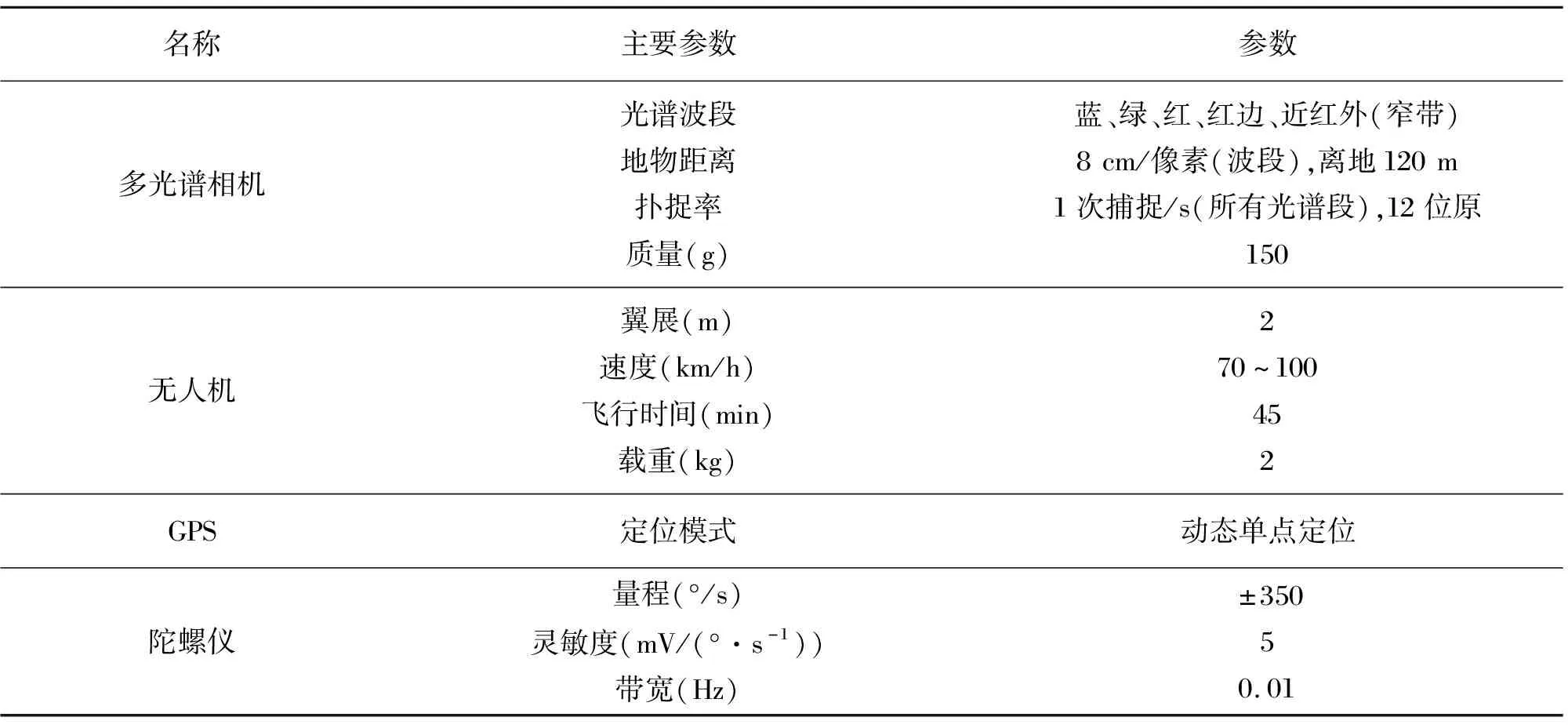
表1 无人机监测平台主要性能指标
监测数据采集区域位于太湖,根据地面观测到的水质参数,在设定的监测区域内设置了7个水质实测点以及相应的起降点与航行路线。在晴朗无风且视野较好的试验时间中,利用无人机在监测区域上空拍摄影像数据,采用70°向下视角进行飞行拍摄,巡航速度最快可以达到100 km/h。为确保影像较高重叠度及清晰度,预设飞行相对航高为120 m,航向重叠为90%以上,旁向重叠为50%以上,两次航飞,南北向共飞行68条航带。在飞行过程中,为提高无人机影像的清晰度,搭载的相机快门速度设置为1/1 500 s。
3.3 监测数据的集成与分析
需要进行处理、分析的水质监测信息主要分为无人机遥感数据与地面监测数据两部分。无人机遥感数据采用与多光谱传感器配套的软件对影像进行导出,进行辐射校正后即可得到光谱反射率数据[18]。地面监测数据主要包括水质自动监测站数据与人工探测仪器采集数据,自动监测站的综合性在线监测系统能够在线连续监测、存储并远程传输各项水质数据,而人工测点采集数据主要依托物联网+技术,利用嵌入式物联网化采集模块,实现水质采集仪器的数据存储与上传。基于无人机遥感的水质监测信息集成体系主要通过TCP/IP将采集的无人机遥感数据与地面监测数据实时传送到监测控制中心,监测控制中心将接收到的水质数据经过一定的分析处理后在应用平台等界面显示,以达到实时监测的作用。水质监测数据的集成由数据采集、数据处理、网络通道、平台系统共同完成,监测中心通过网络向终端发送一个立即传送命令,平台系统对命令进行处理后发出消息,激活数据处理任务,接着发消息激活网络,TCP/IP开始发送数据。这种集成方式不仅实时性好,而且不会占用太多的系统资源和网络资源。
基于无人机遥感的水质监测信息集成体系可以应用于对太湖水体中藻类的覆盖范围等指标的提取。通过对所监测的太湖水体在红光、绿光、蓝光波段的波谱分析可知,由于叶绿素a的原因,如表2所示,含蓝藻水体在绿光波段具有很高的反射率,而在红光和蓝光波段差别不大。同时,通过先验知识可知生长在水体中的蓝藻在540~560 nm、690~720 nm波长的波段具有很明显的反射率,在430~470 nm,630~660 nm波长的波段具有明显的吸收[19]。在此理论基础上,直接采用主流的波段区间和成像方法进行遥感数据分析与藻类提取。

表2 太湖监测点部分水质要素实测数据
图3为太湖水体遥感信息的蓝藻提取图像,由于矿物质离子的原因,水色本身偏绿,在真彩色图像中,蓝藻水华并不明显,如图3(a);利用近红外波段对于叶绿素高灵敏度的特性,合成彩红外假彩色图像,发现蓝藻清晰可见,呈亮红色,与水体明显分隔,如图3(b);运用光谱信息差异进行图像分割,并分类后,得到蓝藻的覆盖区域,如图3(c);将提取的覆盖范围与真彩色图像进行叠加,可以观察水华覆盖的真实区域,如图3(d)。结果表明,多光谱载荷对于对于藻类的覆盖范围等指标有较好的提取能力。通过无人机遥感数据确认藻类覆盖范围后,根据互联技术获取相应地点的自动监测站、人工采样点等数据,将水质要素(总磷、悬浮物浓度、浊度等)实测数据与相应的光谱反射率数据结合进行相关性分析,对水质要素浓度值(总磷、悬浮物浓度、浊度等)以及蓝藻引发因素进行进一步分析与确定。

图3 水域的蓝藻提取图像
4 结 语
水质监测是水质评价与水污染防治的主要依据,尤其对于内陆水体,准确、快捷的水质监测显得尤为重要。本文在目前应用日益广泛的无人机遥感技术的基础上,一方面充分利用无人机遥感在水质监测方面的优势,一方面又考虑其数据分析成果的局限性,提出了多源水质监测信息集成体系,重点实现无人机遥感信息与地面采集信息的数据集成、交换。选择太湖作为应用实验区域,研究表明,该体系不仅能够提高无人机遥感数据的辐射质量,进一步保证多尺度监测数据的高精度要求,还可以对水质监测中的水质要素浓度值、藻类的覆盖范围及成因分析等信息有较好的提取效果,可以广泛应用于内陆水体的水质动态监测与污染预警巡查。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31 08:58:58
建材发展导向(2022年2期)2022-03-08 01:43:38
建材发展导向(2021年14期)2021-08-23 00:57:44
玩具世界(2017年4期)2017-07-21 13:27:24
中国环境监察(2017年3期)2017-05-14 06:19:02
宝藏(2017年2期)2017-03-20 13:16:42
中亚信息(2016年3期)2016-12-01 06:08:24
中国光学(2015年5期)2015-12-09 09:00:28
金融经济(2015年16期)2015-08-21 11:23:58
食品工业科技(2014年23期)2014-03-11 18:18:54