基于双驱动DP-MZM的倍频双啁啾信号产生方法①
2020-10-28 08:08赵尚弘王国栋朱子行
空间电子技术 2020年4期
张 昆,赵尚弘,林 涛,王国栋,李 赫,李 轩,朱子行
(空军工程大学信息与导航学院,西安 710077)
0 引言
线性调频(LFM)信号具有大的时宽带宽积和优良的脉冲压缩特性,可同时提高雷达的测距和测速精度,以及距离和速度分辨率,被广泛应用到现代雷达系统中[1-3]。然而单啁啾LFM信号存在“刀刃状”的模糊函数,导致了雷达在探测运动目标时,存在位置-多普勒模糊问题[4]。为了解决这个问题,雷达可以采用双啁啾LFM信号。双啁啾LFM信号在时域中,波形由两个啁啾相反单啁啾LFM信号的波形干涉而成;在频域中,单个脉冲持续时间里存在两条啁啾相反的扫频直线。微波信号通常由电学方法产生,如LC振荡电路、石英晶体、高品质的射频微波腔及直接数字合成技术等。然而电子瓶颈导致了电学方案产生的双啁啾信号载频较低,通常受限于20 GHz,带宽也受限于 GHz 量级,从源头上限制了雷达性能的提升。随着毫米波、太赫兹(THz)技术的发展,信号的载频和带宽需求逐渐增加。微波光子技术能直接产生、实时处理更高载频、更宽带宽、更大调谐范围的雷达信号,有望为雷达系统发展和军事斗争演化带来技术性和体制性变革[5-7]。
2015年,基于双平行马赫增德尔调制器(DP-MZM)的方案受限被提出,产生了双啁啾信号[8]。方案中,DP-MZM分别受微波和基带信号驱动,生成载波抑制双边带光信号,光电转后产生双啁啾信号。方案产生的信号载频被上转换到驱动射频信号,带宽被扩展为驱动基带信号的二倍。然而,由于方案缺乏倍频操作,产生信号的载频仍受限于驱动微波信号。为了扩展倍频系数,基于双驱动马赫增德尔调制器或双偏振正交相移键控调制器被提出,产生了载波带宽同步倍频的双啁啾LFM信号[9-11]。此外,双啁啾LFM信号也可以通过傅里叶锁模光电振荡器(FDML OEO)产生[12]。方案中,光源的中心频率受到三角波电流控制,为了保证系统模式稳定,采用了分布式反馈激光器。为了防止链路中长距离光纤传输时,色散导致的信号功率衰落,OEO链路中还加入了负色散光纤,补偿光纤引入的色散相移。由于采用了FDML技术,方案可突破OEO的振荡建立时间,产生大时宽带宽积的双啁啾LFM信号。此外,由于信号相位和频率呈微分关系,当采用外电光相位调制技术为两路光信号,引入抛物线相位差时,光电转换后,也可以产生双啁啾信号[13-14]。为了扩展信号的带宽,可以采用抛物线分割方案,2020年中科院半导体所实现了带宽5倍频双啁啾LFM信号的产生[15]。上述方案都采用光学方案实现了双啁啾LFM信号的产生,但存在带宽和载频倍频系数有限的问题。
本文提出一种基于双驱动DP-MZM的载波二倍频、带宽四倍频双啁啾LFM信号的产生方法。方案中,DP-MZM的上臂受射频驱动,产生偶数阶光边带;下臂受基带信号调制,产生单边带光信号。合理地设置驱动信号的调制系数和主调制器的直流相移,可抑制DP-MZM输出光信号中的载波分量。耦合光信号平方率检波后,可产生载波二倍频、带宽四倍频的双啁啾LFM信号。方案产生的双啁啾LFM信号载频受驱动微波信号调谐,带宽受驱动基带信号调谐。所提方案无需偏振器件和光滤波器,具有操作简单、调谐性高的特点,同时具有参数可调谐、信号可重构的优势,可为新一代雷达提供可靠的信号源系统。
1 系统原理

图1 基于双驱动DP-MZM的倍频双啁啾LFM信号产生方案
图1为基于双驱动DP-MZM的倍频双啁啾LFM信号产生方案。方案的核心器件为双驱动DP-MZM,由两个双驱动MZM和一个主MZM组成。光源(LD)产生连续波光信号,通过偏振控制器(PC)注入DP-MZM,子MZM1受射频驱动,子MZM2受基带LFM信号驱动,上下两臂调制光信号通过主MZM3耦合输出。耦合光信号经掺饵激光放大器(EDFA)放大后注入PD完成光电转换,即可生成载频-带宽倍频系数2-4的双啁啾LFM信号。
在DP-MZM的上臂中,MZM1受微波驱动,工作在MATP,输出光信号的光域表达式为:
exp(-jm1cosωRFt)]
(1)
式中,Ec和ωc分别为光源输出信号的幅度和角频率,m1=πVRF/Vπ为MZM1的调制系数,VRF和ωRF为射频信号的峰值电压和角频率,Vπ为DP-MZM子调制器的半波电压。
利用Jacobi-Anger展开式(1),可得:
EM1(t)=Ecexp(jωct)[J0(m1)+
(2)
在小信号模型条件下忽略二阶以上边带,式(2)可近似等于:
EM1(t)≈Ecexp(jωct)[J0(m1)-J2(m1)exp(j2ωRFt)
-J2(m1)exp(-j2ωRFt)]
(3)
在DP-MZM的下臂,MZM2受基带LFM信号驱动,工作在MATP,输出光信号的光域表达式为:
+exp(-jm2coskt2)]
(4)
式中,m2=πVlfm/Vπ为MZM2的调制系数,Vlfm和k分别为基带信号的峰值电压和啁啾率。
利用Jacobi-Anger展开式(4),在小信号模型下,忽略了二阶以上边带,式(4)可近似等于:
EM2(t)≈Ecexp(jωct)[J0(m1)-J2(m1)exp(j2kt2)
-J2(m1)exp(-j2kt2)]
(5)
从式(5)可以看出,对于扩展频谱调制,其调制结果与单音射频信号调制过程相同。
MZM1和MZM2输出光信号通过主MZM耦合,直流偏置相移为θ时,DP-MZM输出光信号可表示为:
Eout(t)=EM1(t)+EM2(t)exp(jθ)
(6)
设置主MZM工作在MITP,即直流相移θ为π,为了抑制输出信号的光载波,应满足m1=m2。此时,DP-MZM输出为基带和射频调制的二阶CS-DSB光信号。
CS-DSB光信号经EDFA放大后,注入PD完成光电转换,产生光电流为:
(7)
式中,G为EDFA的光增益,η为PD的响应度。在式(7)中,产生的光电流包含了双啁啾LFM信号,中心频率为2ωRF,是驱动射频信号的二倍;当驱动基带信号周期为T时,对应带宽为kT/π,双啁啾信号的带宽增加为4kT/π。因此,方案产生了载波-带宽倍频系数2-4的双啁啾LFM信号。此外,式(7)中,产生的光电流中还包含了直流分量、基带信号cos(4kt2)和载波四倍频射频信号cos(4ωRFt)。这些干扰信号的载频远离所需的双啁啾信号,可利用滤波器滤除。同时,在实际应用中,由于天线的辐射特性,直流分量和基带信号无法辐射到自由空间,而高频杂散信号由于PD的响应带宽而滤除。因此所提方案产生了载波-带宽扩展系数2-4的双啁啾LFM信号,信号的载频受驱动射频调谐,带宽受驱动基带信号调谐。
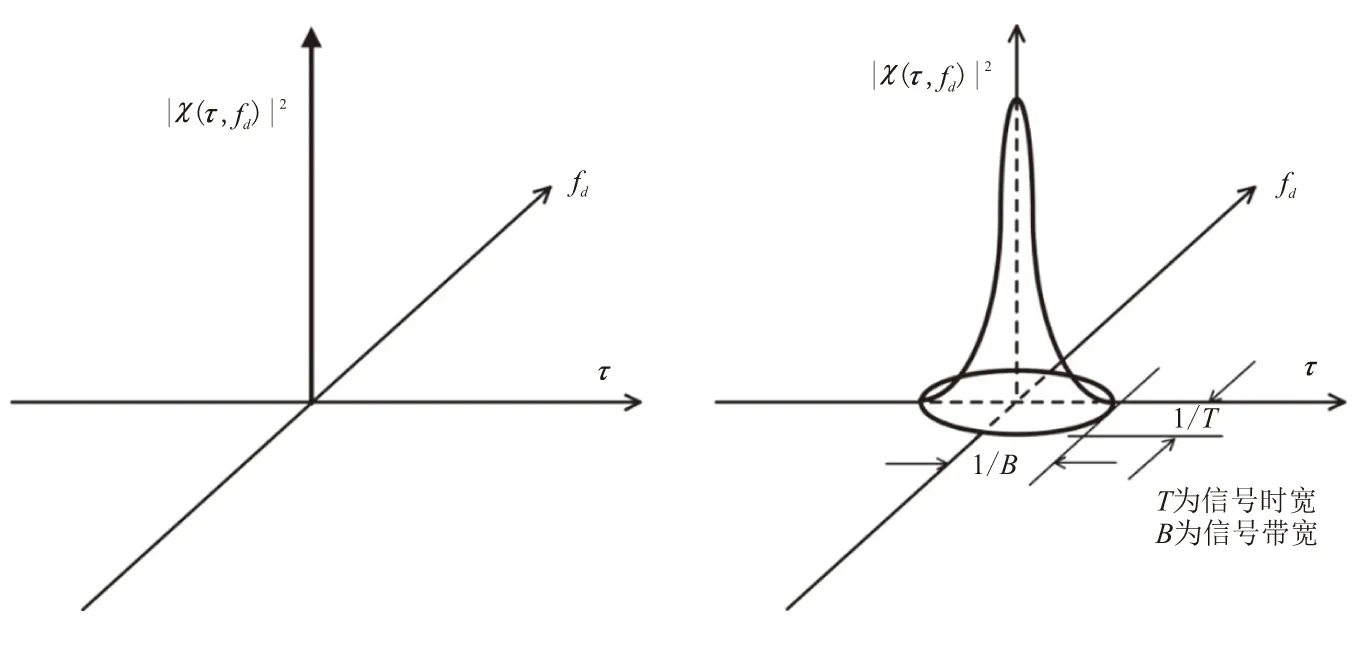
方案产生的倍频双啁啾LFM信号,其探测性能可通过模糊函数检验。模糊函数表示为信号的时间-频率复合自相关积分的平方,反映了雷达的距离分辨力和速度分辨力。理想信号的模糊函数应该为原点处无限窄而其他处均为0的单个窄尖峰。在图2(a)中,除了多目标在原点处无法分辨外,其他位置均无距离和多普勒模糊。当多目标位于原点以外位置时,雷达系统可提供任意高的速度和位置测量精度,能分辨空间位置非常临近的多目标。
然而,由于模糊函数在原点存在有限的峰值,理想的原点冲激模糊函数在物理无法实现。“图钉状”模糊函数除在原点附近,存在距离-多普勒模糊外,其他位置均可为雷达提供好的速度和位置精度,是理想模糊函数的近似形式。图2(b)为"图钉状"模糊函数示意图,主要由原点窄尖峰组成,尖峰的多普勒轴宽度与信号的带宽成反比,时间轴宽度与信号的时宽成反比。因此,为了提高雷达系统的探测性能,除了需要信号具有“图钉状”模糊函数外,还需具有大TBWP特性。
(a) (b)
对于时宽T、啁啾率k的单啁啾LFM信号,其模糊函数可表示为:
|χ(τ,fd)|2=
(8)
式中,±表示单啁啾LFM信号的啁啾符号。
对于时宽T、啁啾率k的双啁啾LFM信号,其模糊函数可表示为:
(9)
从式(8)和式(9)可以看出,双啁啾信号的模糊函数由两个啁啾相反LFM信号的模糊函数组成。双啁啾LFM信号模糊函数在原点处存在窄尖峰,而其他刀刃位置的模糊度降低到1/4,距离-速度探测精度得到了显著的改善。此外,LFM信号调制方式简单,战场中易于被截获,降低了雷达系统的安全性和保密性。而双啁啾LFM信号,是一种复合调制方式,可有效提高雷达系统的探测精度和对抗性能。
2 实验验证结果分析
基于图1的倍频双啁啾信号产生方案搭建实验系统,如图3所示。实验中,光源(Emcore1782)输出波长1551.327 nm、功率15 dBm的线偏振连续光波,通过PC注入DP-MZM(Sumitomo,T.SBZH1.5-20PD-DAC)。DP-MZM的插入损耗为9 dB,消光比为30 dB,半波电压为4 V。射频信号由微波源(R&S SMBV100A)产生,频率设置为7 GHz;基带信号由任意波形发生器(AWG7802)产生,时宽和带宽分别设置为1 μs和400 MHz;调制器偏置电压受直流源(Agilent E3631A)控制,子MZM1和子MZM2工作在MATP,主MZM3工作在MITP。DP-MZM输出光信号通过PD(Agilent 1192A)完成光电转换,产生倍频双啁啾LFM信号。实验中,光谱仪(Advantest Q8384)测量精度为0.01 nm,示波器(DSOV334)采样率为 80 GSa/s,频谱仪(Rohde Schwarz FSV30)带宽为30 GHz,分辨带宽(RBW)设置为100 kHz,分别记录双啁啾信号产生实验中光谱、波形和频谱。
设置DP-MZM上下臂调制系数都为1.2,输出光谱如图4所示。光谱中主要由射频和基带调制二阶边带组成。由于调制器消光比不理想,光谱图中还存在±1阶射频光边带,功率抑制比为25.5 dB。同时,由于采用了较大的调制系数,±4光边带也被激发出来,高阶边带抑制比为31.5 dB,满足实验需求。
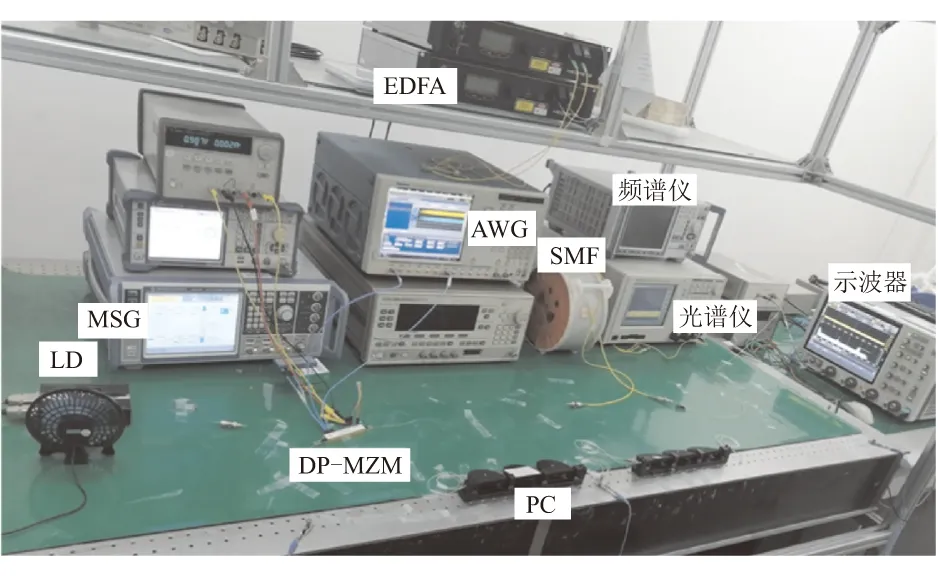
图3 基于双驱动DP-MZM的倍频双啁啾LFM信号产生实验
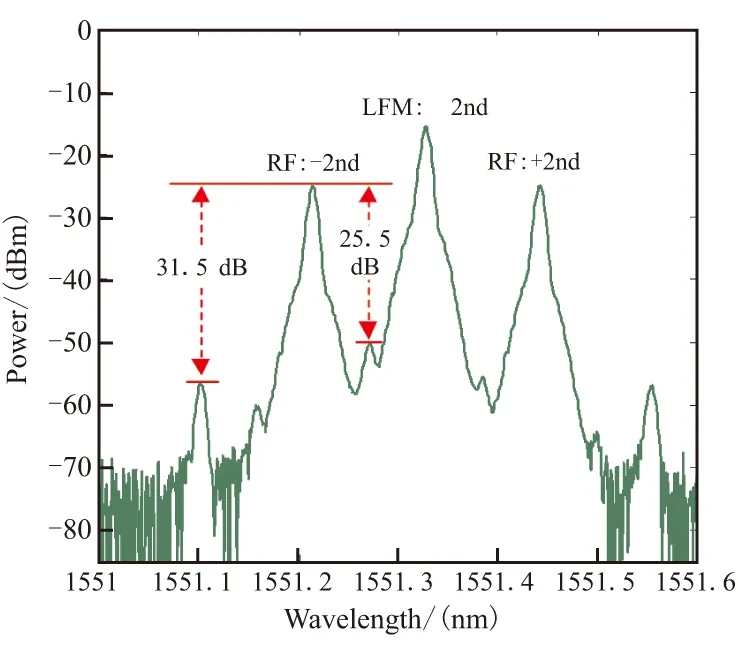
图4 DP-MZM输出光谱
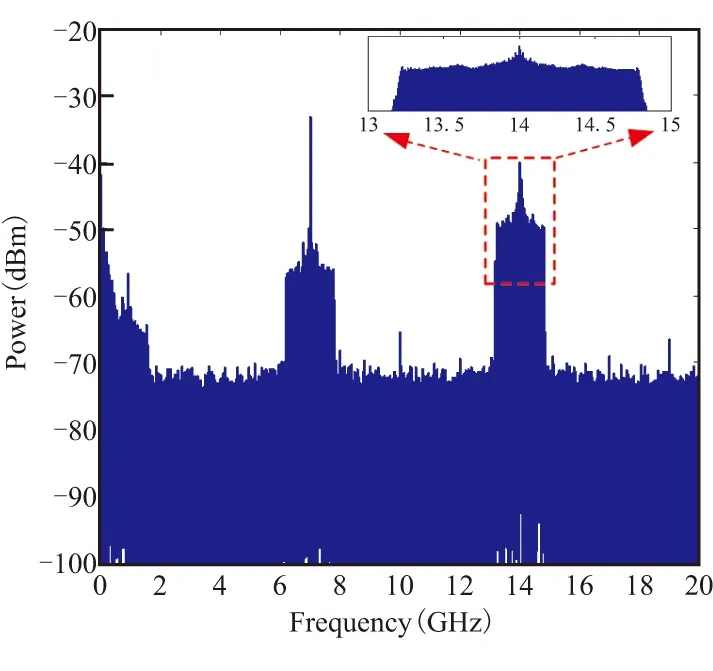
图5 PD输出频谱。插图为双啁啾LFM信号电谱
DP-MZM输出光信号注入PD完成光电转换,拍频信号电谱如图5所示,主要包含直流、基带信号、7 GHz杂散射频信号和14 GHz双啁啾信号。图5中给出了电谱14 GHz处的放大图,可以看处,双啁啾信号中心频率为14 GHz,带宽为1.6 GHz(13.2-14.8 GHz),分别为驱动射频和基带信号的二倍和四倍,与理论分析相符。此外,由于调制器有限的消光比,7 GHz处出现了杂散信号,这一问题可通过使用高消光比DP-MZM改善。
PD拍频信号滤除杂波后,图6(a)为产生的载波-带宽倍频系数2-4的双啁啾LFM波形。利用短时傅里叶变换(STFT)提取信号的频时曲线。在图6(b)中,时频图中包含两条中心频率14 GHz、啁啾率0.8 GHz/μs和-0.8 GHz/μs的互补频时曲线,对应频率变化范围14-14.8 GHz与14-13.2 GHz的正、负啁啾LFM信号。双啁啾信号的带宽为1.6 GHz,对应TBWP可计算为1600。同时,时频图中还存在其他杂波频率,如啁啾率0.4 GHz/μs和-0.4 GHz/μs的LFM信号,和14 GHz射频信号。该问题是由于调制器有限消光比,导致了射频±1阶和基带±1光边带未能完全抑制,拍频后出现了杂散信号。

(a)

(b)
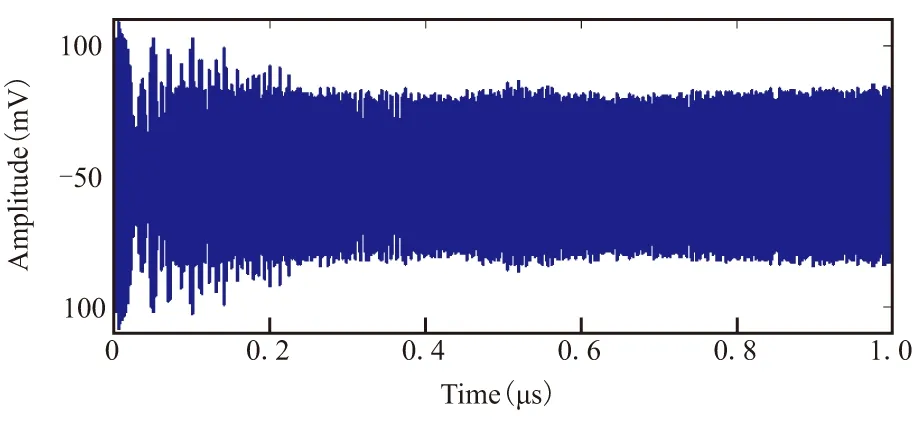
为了验证信号的探测性能,图7给出了信号单周期的波形和对应的自相关结果。
(a)

(b) (c)
在自相关图7(b)中,波形自相关处理后,峰值旁瓣比为6.11 dB;在主瓣放大图中,包络表现出辛格(sinc)函数;时宽为1 μs的双啁啾信号,脉冲压缩后峰值的半高全宽为0.762 ns,对应脉冲压缩比可计算为1312。因此所提方案产生了载频14 GHz、带宽1.6 GHz的双啁啾信号。信号具有好的脉冲压缩性能,更高载频、更大带宽的双啁啾信号可通过改变驱动射频和基带信号获得。
3 信号探测性能分析
3.1 倍频双啁啾LFM信号的模糊函数
为了研究产生信号的探测性能,利用Matlab绘制载频14 GHz、带宽1.6 GHz、时宽1 μs双啁啾LFM信号的模糊函数,如图8(a)所示。可以看出,模糊函数关于原点对称,尖峰位于原点处。因此,除了原点附近外,目标位于其他位置时,雷达都具有精确地位置和速度分辨力。图8(b)为双啁啾信号模糊函数的等值线图。作为对比,图9(a)给出了载频14 GHz、带宽1.6 GHz、时宽1 μs正啁啾LFM信号模糊函数图。可以看出,相比于图9(a),图9(a)模糊函数表现出“刀刃状”,在刀刃附近存在较大位置-多普勒模糊。而双啁啾信号的模糊函数,刀刃部分降低为1/4,表现出“图钉状”,可以有效提高雷达探测的距离-速度联合分辨力。图9(b)为相同带宽和时宽条件下,单啁啾LFM信号模糊函数的-3 dB等值线。可以看出,所提方案产生的双啁啾信号,-3 dB模糊函数远小于LFM信号。因此,双啁啾LFM信号有效地改善了单啁啾LFM信号存在的位置-多普勒耦合问题,可极大提高雷达系统的探测精度。

(a) (b)

(a) (b)
3.2 倍频双啁啾LFM信号的运动目标探测能力分析
双啁啾LFM信号,模糊函数呈“图钉状”,可以有效解决单啁啾LFM信号存在的距离-多普勒耦合问题。为了验证双啁啾信号的运动目标探测性能,搭建图10的仿真系统。仿真中,利用所提方案产生Ka波段的双啁啾LFM信号,时宽设定为200 μs,中心频率为30 GHz,频率变化范围设定为29.5 GHz-30.5 GHz和30.5 GHz-29.5 GHz。双啁啾信号放大后通过天线辐射到自由空间完成探测。目标与雷达距离设置为24 km,径向速度为0.8 km/s。

图10 双啁啾LFM信号雷达系统运动目标探测示意图
目标回波匹配滤波处理后,输出结果的包络如图11所示。可以看出,图11存在两个匹配滤波峰值,分别对应双啁啾信号的正啁啾扫频信号和负啁啾扫频信号。由于两个单啁啾信号中心频率相同,即对应着相等的多普勒频移,因此目标的真时延应该位于两个匹配滤波峰值的中间,即160 μs,由此可计算目标与雷达的距离为24 km。
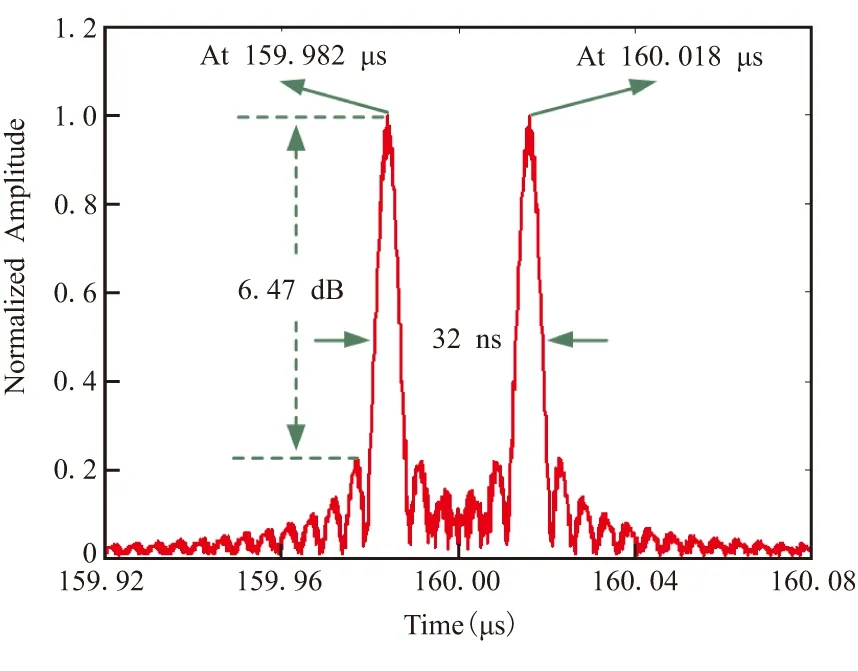
图11 双啁啾LFM信号雷达系统匹配滤波输出结果
目标速度可通过多普勒效应计算,即:
(10)
式中,Δt为啁啾信号波形匹配滤波处理后与真时延的时间偏离,f和B分别为双啁啾信号的载频和带宽,v为目标的径向速度,c为光速,为简化分析取为3×108m/s。在图11中,由于多普勒效应,正负啁啾信号相对于目标真时延分别偏离了-18 ns和+18 ns,带入式(6.20)中,可计算得到目标的径向速度为0.8 km/s。由此可知,雷达观测场景中,目标相对于雷达距离为24 km,速度为0.8 km/s,与仿真设置相同。此外,当雷达分别使用正啁啾信号和负啁啾信号观测目标时,匹配滤波结果将存在-2.7 m和+2.7 m的位置误差,且无法测量到目标的速度信息。
雷达工作在单啁啾LFM信号体制下,当发射信号脉冲比较窄、啁啾率比较低、观测目标径向速度不太高时,LFM信号具有多普勒频移不敏感的优势。但处于空间运动状态的观测目标速度一般都比较快,如弹道导弹再入大气层时速度可达5000 m/s以上,四代战机也具备超音速巡航的能力,此时LFM信号的多普勒-时延耦合现象将导致雷达一维距离像在时间轴发生平移,出现成像模糊问题。雷达采用双啁啾信号,可有效提高目标探测时的多普勒-时延联合精度,解决单啁啾LFM存在的成像模糊问题。
4 结论
为了产生倍频双啁啾LFM信号,文中提出了一种基于双驱动DP-MZM的方案。理论分析了双啁啾LFM信号的产生原理,利用模数函数研究了双啁啾LFM信号对雷达探测性能的改善。实验产生了载频14 GHz、带宽1.6 GHz、时宽带宽积1600的双啁啾LFM信号。对信号的波形进行自相关处理,峰值旁瓣比为6.11 dB,1 μs的波形被压缩至0.762 ns,对应脉冲压缩比为1312。所提方案无需偏振器件和光滤波器,具有操作简单、调谐性高的优势,产生信号表现出好的旁瓣抑制性能和脉冲压缩性能。最后,分析了产生信号的探测性能,双啁啾LFM信号模糊函数呈近似“图钉状”,表现出好的位置-多普勒联合分辨力;在运动目标场景中,所提方案产生的信号可准确探测到目标的速度和位置信息,而单啁啾信号由于位置-多普勒耦合问题,将存在2.7m的测距误差。
猜你喜欢
中国临床医学影像杂志(2022年5期)2022-07-26
北京航空航天大学学报(2021年9期)2021-11-02
电子技术与软件工程(2021年14期)2021-09-23
兰州理工大学学报(2021年1期)2021-03-09
医学新知(2019年4期)2020-01-02
中国电子报(2019年55期)2019-10-24
通信产业报(2019年26期)2019-08-30
雷达学报(2018年1期)2018-04-04
办公自动化(2016年20期)2016-12-18
物理教学探讨(2014年5期)2014-09-18