全向移动侦察消防机器人
2020-10-28 07:21:34
辽宁工业大学学报(自然科学版) 2020年5期
(辽宁工业大学 电气工程学院,辽宁 锦州 121001)
随着社会经济的发展,各种建筑物结构越来越复杂。若复杂结构的建筑中发生火灾,在没有对现场进行充分的信息采集和分析的情况下,救援人员贸然进入现场进行救援,不仅会造成巨大的财产损失,也会给受灾人员和救援人员带来巨大的生命危险。消防机器人作为一种无生命载体,可以代替救援人员进入危险复杂的环境进行信息获取,也可以辅助救援人员进行救援活动,能够极大地减少财产损失和人员伤亡。
我国开始研究消防机器人起步较晚,但对消防机器人的研发工作进展非常迅速。现在常见的消防机器人基本都使用履带作为移动平台,履带构成的移动平台体积大、重量沉,无法进入狭小通道前进。所以设计了一种使用麦克纳姆轮作为移动平台的消防机器人,能够使用遥控器进行手动控制,也可以进行自动控制,完成火焰识别并与火焰保持一定的安全距离后发射消防弹丸灭火。
1 机械结构
机器人机械结构包括移动平台、发射装置,具体机械结构如图1 所示。
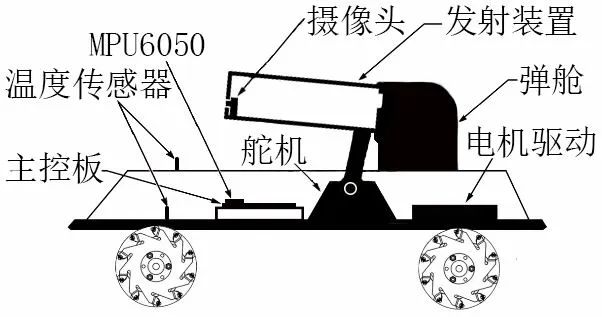
图1 机器人机械结构
采用麦克纳姆轮构成机器人底盘,使机器人可以进行全向移动,能够更好适应狭小的工作环境[1]。移动平台与发射管之间使用舵机连接,舵机固定在机器人底盘上,可以控制发射管角度。弹舱用来存储消防弹丸,最多能够存储12 个弹丸。
小型投掷型消防球具有抗压抗高温、遇明火才会破裂灭火的特性,所以在发射装置中使用摩擦轮对消防弹进行加速,使弹丸能够以较高的初速度从发射管中射出,并在一定距离内保持近似直线的运动轨迹。
2 控制系统设计
系统可采用2 种控制方式,一种为采用无线遥控的方式手动控制机器人进行全向移动、瞄准、发射弹丸等动作;另一种为机器人自动控制,进行瞄准、调整机器人与火焰之间距离、发射弹丸灭火的动作。
在手动控制下,使用遥控器发送控制信息到机器人主控模块,机器人主控模块根据接收的控制信息对机器人进行控制,完成相关动作;在自动控制下,机器人通过摄像头识别火焰位置,分析机器人与火焰距离,调整至安全距离后,发射弹丸对火焰进行处理。机器人系统控制框图如图2 所示。

图2 系统控制框图
2.1 硬件结构设计
2.1.1 主控板
主控板采用STM32F103 单片机作为主控板的核心,STM32 单片机基于ARM 公司“Cortex-M3”内核的32 位微控制器,功耗低、体积小且功能强大,可对其扩展外设,软件调试多样,编程灵活,硬件容易实现,且运算功能强大[2-3]。
2.1.2 温度采集
采用PT100 传感器对机器人内外温度进行检测,外部的温度传感器用于实时监测现场内环境温度,内部的温度传感器用于监控机器人内部温度,防止机器人由于内部温度过高导致停止工作。
2.1.3 图像采集
采用USBFHD08H型摄像头进行视频图像的采集。使用USB2.0 接口与树莓派进行连接,支持1 920×1 080 60 帧、1 280×720 120 帧、640×260 260帧分辨率及帧率。摄像头采集现场视频图像,通过无线传输模块发送到遥控器进行显示,对采集范围内的火焰进行识别并在图像中进行标记,自动模式中,发送火焰在视频采集范围内的坐标到主控模块,控制机器人原地旋转,使火焰坐标在视频采集范围中心位置,完成自动瞄准。
2.1.4 姿态获取
采用MPU6050 传感器获取机器人底盘角度,MPU6050 是一种6 轴姿态传感器,集成了3 轴陀螺仪和3 轴加速度计。通过传感器输出的四元数计算机器人此时相对于地面的俯仰角、横滚角、偏航角。得到机器人底盘的姿态角,可以确定机器人当前状态,也可以在自动控制中控制发射管与水平面之间的角度保持不变。
2.1.5 发射控制结构
弹丸发射部分使用摩擦轮给弹丸提供动力从发射管射出。底座上的舵机控制发射管角度,发射管中的直流无刷电机带动摩擦轮转动,使用光电对管检测在弹舱出口处与发射管入口处是否存在弹丸,从而控制是否上弹。
2.2 控制算法
2.2.1 底盘电机速度控制
机器人的移动速度与遥控器摇杆模拟量相关,模拟量越大则电机速度越大,为了使机器人更快更稳定地达到遥控器需求的目标速度,采用增量PID对电机速度进行控制。增量式离散PID 公式:

式中:e(k)为本次偏差值;e(k-)1为上一次的偏差值;pwm为增量输出。
读取编码器的值,积分后得到速度值,之后将得到的速度值与目标速度值代入PID 函数中计算后得到需要的速度对应的PWM 值,最后将PWM 值存入寄存器进行电机速度控制。
2.2.2 机器人姿态获取与发射管角度控制
为防止机器人在不平整地面行进时摄像头跟随机器人动作造成的视角变化,对机器人底盘进行姿态采集,通过对底盘俯仰角变化值进行计算,使发射管保持受遥控器调整后与水平面的角度。
在机器人的姿态获取中将原始角速度数据转换为四元组数据,完成欧拉角计算。
DMP 输出四元数为Q30 格式的数据,比浮点数放大了230倍。在使用时转换为浮点数[4]。数据转换公式为:

代入欧拉角公式,得俯仰角为:

翻滚角为:

偏航角为:

经过计算得到欧拉角。
在得到机器人底盘俯仰角后,根据前一次与后一次的角度变化,计算出控制舵机角度的PWM,将得到的PWM 赋值给舵机控制函数中完成对发射管角度的控制。
2.2.3 自动控制
使用摄像头对火焰进行识别,判断火焰在视频采集范围内的坐标,主控模块根据火焰坐标控制机器人进行原地旋转并调整发射管角度来完成对火焰的瞄准,并对机器人与火焰之间的距离进行获取。
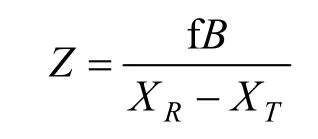
如图3 所示,点P 为待测物体上的一点,OR、OT为2 个摄像头的光心,点P'和P"为P 点在感光器上的成像点,f为摄像头焦距,B为2 摄像头中心距,Z为所求深度[5]。

图3 双目测距原理图
设P'到P"的距离为dis,得:

根据相似三角形原理:

得:
为防止机器人与火焰距离过近导致器件受损或快速升温,在程序中设定机器人与火焰之间的安全距离为1 m。自动控制下,若机器人判断自身距离火焰在1 m 内,首先瞄准火焰,之后向后移动至距离火焰1 m 处,之后对火焰发射消防弹丸。
3 调试结果
3.1 火焰识别与位置控制
机器人使用摄像头对火焰进行识别,利用双目摄像头测距原理对机器人与火源间的距离进行检测。
如图4、图5 为摄像头对火焰识别图。与原图进行对比可以看出,摄像头在识别火焰时,只有橘红色部分为白,背景及其他部分为黑色。

图4 火焰识别图

图5 火焰原始图像
在机器人前放置手电等光源进行测试,机器人没有对光源进行瞄准动作,故机器人只对火焰进行瞄准动作而不对手电筒等光源发生反映。
双目测距在经过标定、校正、双目匹配后,才能进行深度计算。
在调试中,首先使用红色色块作为被测物体,进行水平前移、后移的距离检测并记录。结果如表1 所示。

表1 机器人与目标距离记录 m
之后固定目标物体,分别将机器人放置在不同位置,让机器人自动调整与目标之间距离,记录机器人移动后位置[6]。结果如表2 所示。

表2 机器人位置记录 m
经反复测试证明,机器人可以完成对火焰的识别、瞄准,并可以控制机器人保持在目标1 m 左右距离。
3.2 发射管角度与弹丸发射调试
机器人在行进过程中,发射管保持遥控器设定的发射管与水平面的角度。
首先将发射管与水平面角度设定为30°,之后改变机器人底盘及发射管与水平面之间的角度,并进行记录[6]。结果如表3 所示。

表3 发射管角度记录 (°)
从表3 中可以看出,随着机器人底盘角度的改变,发射管与水平面的角度基本保持一致,可以在机器人运行过程中保证视角的稳定。
在弹丸发射调试中,机器人与目标之间的距离为1 m,发射管距离地面约为25 cm,弹丸重量约0.2 kg。
机器人使用自动控制模式进行瞄准并发射弹丸,记录弹丸发射距离并将落点与目标之间的距离进行记录。结果如表4 所示。
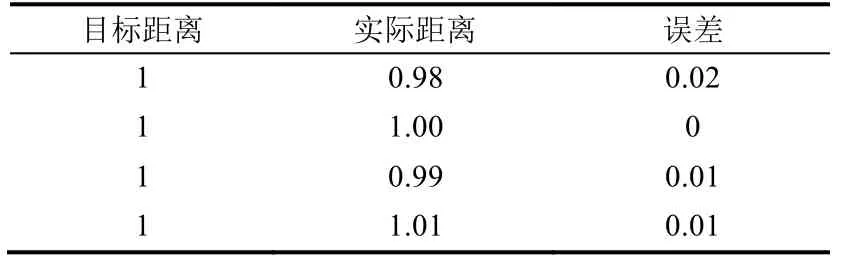
表4 弹丸发射距离记录 m
从表4 中可以看出,机器人可以在自动控制下,自动瞄准目标并较精准地发射弹丸击中目标。
4 结论
基于STM32 单片机设计一种侦察消防机器人。机器人采用麦克纳姆轮构成移动平台,在发射装置中利用摩擦轮加速消防弹从发射管射出。机器人能够通过摄像头对火焰进行识别,并利用双目测距原理测量火焰与机器人之间的距离,完成自动控制机器人与火焰之间距离并自动瞄准、发射消防弹的功能。对火焰识别、距离检测、机器人自动调节与目标之间的距离、保持发射管角度以及弹丸发射功能进行调试,并证明各种功能的实用性。
这种消防机器人改变了目前一般消防机器人的移动方式,使消防机器人体型更小、移动更灵活,也改变了侦察型消防机器人只能进行信息获取而不能对火情进行抑制的情况。增加了机器人的自动控制功能,降低了机器人的操作难度。
猜你喜欢
水下无人系统学报(2024年1期)2024-03-14 03:42:52
广东石油化工学院学报(2022年4期)2022-09-13 01:36:28
小学生必读(中年级版)(2021年12期)2021-12-02 09:04:43
装备制造技术(2021年4期)2021-08-05 07:39:12
科技视界(2020年15期)2020-08-04 16:20:35
数字海洋与水下攻防(2018年2期)2018-11-08 01:01:44
电子测试(2018年6期)2018-05-09 07:31:47
铁道通信信号(2016年12期)2016-06-01 12:11:58
海峡科技与产业(2016年3期)2016-05-17 04:32:11
弹箭与制导学报(2015年1期)2015-03-11 15:32:09