基于MATLAB的开关磁阻电机系统的建模
2020-10-26 08:52王爱花谢海良
今日自动化 2020年2期
王爱花,谢海良
(漯河职业技术学院,河南漯河 462000)
MATLAB 是一款主要面对科学计算、可视化以及交互式程序设计的高端科学计算软件,作为MATLAB 最重要组件之一的Simulink,集成了动态系统建模、仿真和综合分析的功能,利用其电气系统模块库(Power System Blockset)可以准确快速的对开关磁阻电机系统(SRD)进行建模仿真。
1 SRD组成
SRD 主要由5 大部分组成,分别是开关磁阻电机本体(SRM)、电流检测器、转子位置检测器、功率变换器、控制器5大部分组成,系统框图如图1所示。

图1 开关磁阻电动机系统框图
SRM 是SRD 的执行部件和动力输出机构,它负责完成控制者下达的控制指令,最终将系统的电能转换为机械能输出,是SRD 中机电能量转换的部件,也是整个系统的核心部件之一。
SRM 运转时所需要的能量来自于功率变换器,它把蓄电池的直流电能以合适的方式转换后提供给SRM。因为SRM 绕组的电流是单向的,所以其功率变换器不仅结构简单,而且相绕组与主开关器件采用的是简单的串联连接方式,避免了直接短路故障现象。功率变换器主电路的结构形式由供电电压、电动机相数以及主开关器件的种类所决定,它是SRD 能量传输的通道,直接用来驱动SRM,因此功率变换器是影响SRD 性价比的主要因素之一。
SRM 的运行状态取决于控制器。控制器通过综合处理速度、位置和电流等信号并通过功率变换器实现对SRM 运行状态的控制,所以控制器的优劣将会直接影响到SRM 的运行性能。
位置检测器用来检测转子位置以及提供速度信号。电流检测器用来检测系统的电流信号并提供电流信息来完成电流斩波控制或采取相应的保护措施以防止出现过电流现象。
2 SRM本体模型
如图2所示为在Simulink 中创建的SRM 本体模块,它包含转矩计算和相电流生成2个子模块,是SRD 仿真模型的核心。模型可以准确求取SRM 位置信号、转速和三相相电流,通过f lux linkage、Angle、TTBL 和电流表,模型可以准确描述SRM 的本质属性。因此,MATLAB 可把开关磁阻电机的特性做的非常接近实际电机的特性。
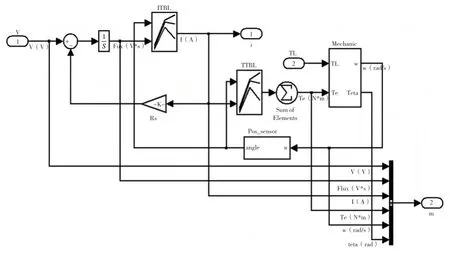
图2 SRM本体模块
3 SRD系统仿真模型
在Simulink 中构建出SRD 系统的仿真模型,如图3所示。电路由参考电流信号10触发功率变换器,其内部的电子开关器件依次导通并输出电流给SRM,定子绕组产生的磁场力驱动转子向同一方向持续转动。电机输出的转速经过位置传感器处理后变成逻辑信号和给定电流信号相乘,然后再与反馈回来的电流值做差,信号再经过一个电流滞环环节产生锯齿状的波浪信号,再传递给功率变换器,周而复始地控制电机的转动。电机转速趋向匀速,电流、力矩和磁通都有所减小,直到电机达到指定转速后,电流滞环也不再起作用,切换控制。

图3 SRD的仿真模型
4 结束语
通过一种将控制系统模块化、功能化的新的建模方法,在MATLAB 仿真软件的Simulink 模块下建立了SRM 的数学模型,并应用该方法建立了三相6/4 极SRM 本体模块和SRD系统模型,为SRD 系统分析、设计提供了新的途径和工具。
猜你喜欢
大电机技术(2022年5期)2022-11-17
防爆电机(2021年4期)2021-07-28
哈哈画报(2021年10期)2021-02-28
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
时代人物(2019年29期)2019-11-25
电子制作(2018年19期)2018-11-14
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
制造业自动化(2017年2期)2017-03-20
现代防御技术(2014年6期)2014-02-28