
无人机航拍的最佳飞行高度研究
2020-10-21 14:36姚莉娜郑皓科廖辰靖张馨林慧
机电信息 2020年11期
姚莉娜 郑皓科 廖辰靖 张馨 林慧

摘要:无人机是现代科技创新的重要成果之一,当前越来越被广泛地应用于国防、农业、无人机航拍等诸多领域。现以焦距为120 mm、像元大小为0.001 2 mm的航拍摄像无人机为基础,对无人机的最佳航拍飞行高度进行了研究,通过建立目标位置与飞行高度、拍摄角度之间存在的关系数学模型,求解得到了无人机在执行任务时的飞行高度范围以及在不同的固定拍摄角度下的最佳飞行高度。
关键词:地面分辨率;飞行高度;无人机航拍
1 概述
无人机航拍能给人们带来宽阔的视野,但无人机在拍摄过程中,除了受外界因素影响外,还会受到飞行高度、飞行速度等多方面的影响,因此对无人机操作员的技术要求也相当高。无人机对一定范围进行拍摄时,在不受风向、湿度等外界因素影响,且无人机飞行速度和拍摄角度不变的条件下,无人机拍摄采集的信息精确度与其飞行高度有关。因此,为了保证无人机拍摄时采集信息的精确程度,需要建立目标位置与飞行高度、拍摄角度之间存在的关系数学模型,求出无人机在执行航拍任务时的飞行高度范围,可进一步确定在固定拍摄角度下航拍的最佳飞行高度。
2 模型建立与求解
2.1 建立相关数学模型
根据无人机拍摄的构图关系,我们得出如下关系:
H=(fGR)/α
式中,H为航拍高度;f为航拍相机的焦距;GR为地面分辨率;α为像元大小。
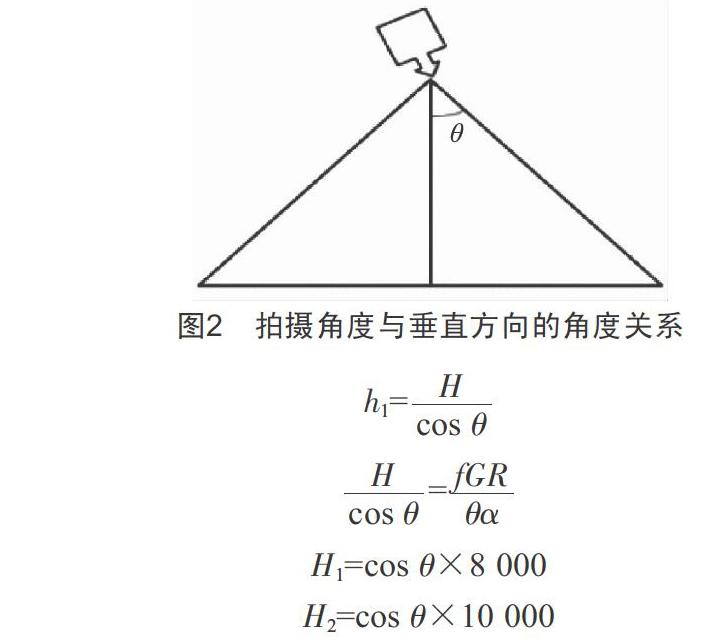
当无人机拍摄方向垂直向下时,h1=H,其中h1为摄像机到拍摄目标的距离。
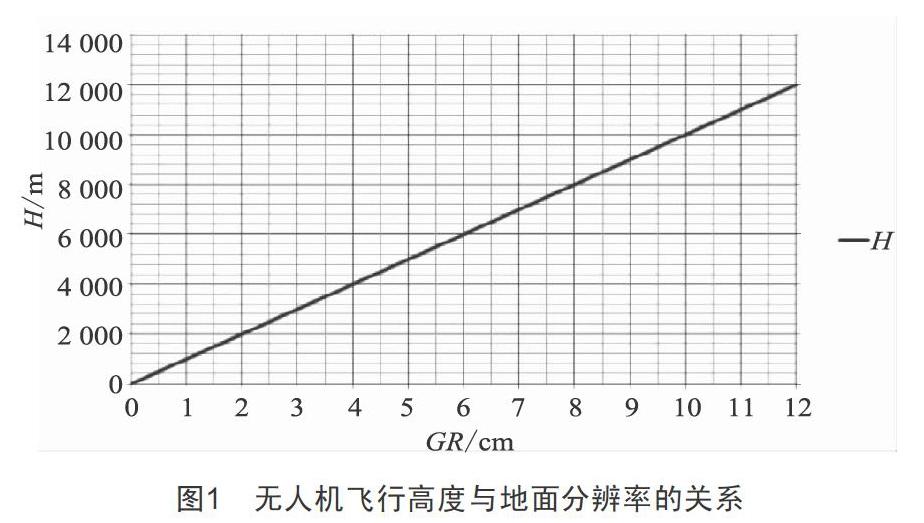
我们选定的无人机航拍相机所取的焦距f、像元大小α已知,焦距为120 mm,像元大小为0.001 2 mm,当无人机航拍任务过程中相片呈现的比例尺为1:1 000时,地面分辨率的范围是8~10 cm,通过以上关系求得,在照片以1:1 000呈现时,执行航拍的无人机飞行高度范围为8 000~10 000 m,即为保证拍摄目标在该比例尺下呈现出清晰的图片,摄像机到拍摄目标的距离h1为8 000 m≤h1≤10 000 m。
此时无人机飞行高度与地面分辨率的关系如图1所示。
为了保证地面分辨率足够大,收集的数据准确率高,此时在指定拍摄角度垂直向下时,最佳航拍高度为10 000 m。
2.2 模型求解
當拍摄角度由垂直向下发生偏转,在1:1 000的比例尺下要保证拍摄效果较好,地面分辨率在8~10 cm,镜头与拍摄目标的距离h1要保证在8 000~10 000 m。当拍摄角度与垂直方向成θ角时,如图2所示,我们可得到如下关系:
通过对模型求解可得到无人机航拍角度θ固定在0°~90°不同角度下的无人机拍摄飞行高度范围和相应拍摄角度下的最佳航拍高度。
H1(固定角度拍摄时飞机的最低高度)与H2(固定角度拍摄时飞机的最高高度)、θ的关系如图3所示。
分析图3可知,当固定一个角度θ时,无人机航拍的高度都在该θ角度所对应的H1与H2之间。地面分辨率指的是影像能有差别分开相邻两个物体的能力,相对于H1来说,当高度为H2,无人机航拍时的地面分辨率较高,在相同比例尺的条件下,采集的信息更准确。所以对任意的固定角度来说,H2为最佳飞行高度。
3 结语
在本文的求解过程中,我们通过将无人机拍摄所呈现的比例尺和拍摄目标的地面分辨率结合起来,解决了如何求无人机在不同的固定拍摄角度下的拍摄高度范围和最佳高度的问题。在建立的数学模型中,先通过对特殊的角度,即当无人机拍摄方向垂直向下时,h1=H,根据无人机拍摄的构图关系,得出H=(fGR)/α的关系;再对θ∈(0°,90°)进行分析,同时建立相关模型h1,H1=cos θ×8 000,H2=cos θ×10 000;通过对模型求解得到无人机航拍角度θ固定在0°~90°不同角度下的无人机拍摄飞行高度范围以及相应拍摄角度下的最佳航拍高度。当固定一个角度θ时,无人机航拍的高度都在该θ所对应的H1与H2之间,从而根据分辨率得出最佳高度。
[参考文献]
[1] ITKN M, KIM M,PARK Y.Development of Cloud-Based UAV Monitoring and Management System[J].Sensors,2016,16(11):1913.
[2] KOPARDEKAR P H.Airspace Systems Program:Next Generation Air Transportation System Concepts and Technology Development FY2010 Project Plan Version 3.0[R].Moffett Field:NASA Ames Research CenteR,2010.
[3] 郭宇,王洪艳,刘升.基于STM32的无人机小车追踪系统[J].科技经济导刊,2019,27(10):43.
[4] 李秋妮,杨任农,刘棕成.多无人机目标追踪自适应控制[J].控制与决策,2019,34(12):1-6.
[5] 李俊.无人机航摄数据质量检查方法研究[D].湘潭:湘潭大学,2018.
收稿日期:2020-03-28
作者简介:姚莉娜(1998—),女,安徽安庆人,研究方向:无人机。
猜你喜欢
江苏广播电视报·新教育(2022年6期)2022-06-10
热带作物学报(2021年1期)2021-02-22
时代邮刊·下半月(2020年9期)2020-09-23
锦绣·中旬刊(2019年2期)2019-10-21
照相机(2019年4期)2019-09-10
科技信息·中旬刊(2018年9期)2018-10-21
环球时报(2018-09-10)2018-09-10
航空模型(2017年12期)2018-05-08
少儿科学周刊·少年版(2017年7期)2017-09-29
航空模型(2016年5期)2016-07-25
