
基于ADAMS的空中滑台机器人动力学特性分析
2020-10-21 05:29孙中刚郭涛
科学与信息化 2020年4期
孙中刚 郭涛


摘 要 文章主要阐述的内容包括设计标准六轴机器人空中滑台系统,配合多台加工中心构成一序多机加工单元。基于多体动力学分析软件ADAMS建立机器人空中滑台系统虚拟样机模型[1],验证伺服电机和减速器选型合理。基于虚拟样机模型对机器人空中滑台系统在不同工况下进行仿真分析,得出在最大加速度及机器人臂展最长工况下的驱动齿轮啮合力曲线。
关键词 机器人;空中滑台;ADAMS;虚拟样机;动力学
引言
汽车发动机缸体和缸盖在铸造完成后要进行多工序机械加工,国内大部分车厂都已实现配合加工中心自动上下料集成。传统形式有直角坐标机器人、坐地标准六轴机器人和地面滑台标准六轴机器人形式。综合上述三种形式的优缺点,设计标准六轴机器人空中滑台系统,配合多台加工中心构成一序多机加工单元,机器人从加工中心頂门进行上下料,如其中一台设备发生故障,可单独切出生产,封闭顶门,从侧门进行维修,生产线不会停机,保证最大生产效率。
1标准六轴机器人空中滑台系统设计
滑台系统参数:滑台最大负载W≥3300KG;最高速度=2.5M/S;最大加速度=1M/S?;加减速时间T=0.5S;重复单位精度:±0.5mm;共振频率≥10Hz;最大挠度≤0.7mm/10M。
1-六轴机器人 2-空中滑台 3-加工中心 4-地面输送辊道
5-空中维修通道
滑台通过伺服电机-直线导轨-齿轮齿条传动链实现机器人的移动,齿轮齿数Z=40,模数m=4,分度圆直径d=40×4=160mm,减速机减速比I=11[2],力学参数计算如下:
加速时驱动力:
匀速时驱动力:
减速时驱动力:
负载扭矩:
电机功率:
其中为直线导轨摩擦系数,G为重力加速度,为齿轮齿条传动效率,n为伺服电机转速。
2基于ADAMS的空中滑台系统虚拟样机模型建立及动力学分析
伺服电机额定转速n=1500r/min,折算到ADAMS中以度/秒为单位的输入转速为,加减速时间为0.5S,仿真总时长为2.5S,则ADAMS中伺服电机输入转速函数为:
step(time,0,0d,0.5,-9000d)+step(time,0.5,0d,2,0d)+step(time,2,0d,2.5,9000d)
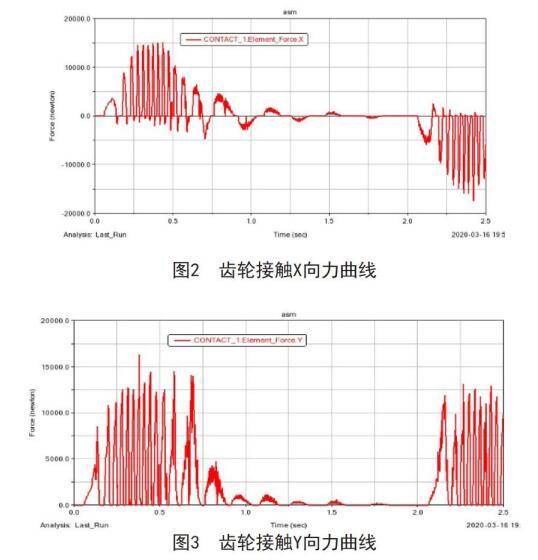
通过ADAMS虚拟样机仿真分析,得出机器人在最大臂展姿态下齿轮齿条X向接触力曲线最大值为15111.5108N,Y向接触力曲线最大值为16298.1694N,Z向接触力曲线最大值为2458.3463N。最大力都出现在启动和停止阶段,匀速运行阶段曲线平稳,传动链系统设计合理。
驱动伺服电机转矩曲线最大值125.9457,最小值1.8951,在启动和停止阶段,电机输出较大扭矩,匀速运动阶段,电机扭矩曲线平稳,系统设计合理。
3结束语
(1)设计空中滑台机器人一序多机加工单元,实现机器人最大化利用,单机设备出现故障维护不停机。
(2)基于多体动力学分析软件ADAMS建立空中滑台系统虚拟样机模型进行分析,得出齿轮齿条接触力参数,驱动伺服电机转矩曲线。
参考文献
[1] 李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社, 2008:101.
[2] 石博强,申焱华,宁晓斌,等.ADAMS基础与工程范例教程[M].北京:中国铁道出版社,2007:168.
猜你喜欢
红领巾·萌芽(2022年2期)2022-01-31
智富时代(2018年1期)2018-03-26
智富时代(2018年1期)2018-03-26
中学生理科应试(2017年7期)2017-08-09
中学生理科应试(2017年7期)2017-08-09
中学物理·高中(2016年8期)2016-08-08
考试周刊(2016年1期)2016-03-11
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
