
EPS系统处理超限转角的算法研究
2020-10-21 04:14侯训波
汽车实用技术 2020年12期
侯训波
摘 要:针对Hella扭矩转角传感器P信号和S信号开展研究,分析了EPS系统测量角度的基本工作原理,归纳了游标算法角度可循环性特点,以及跟随算法角度可跟随延伸特点,明确了影响有效角度测量范围的关键因素;依此,在超限转角的情况下,提出游标算法角度的测量可信度评估算法,判断其可靠时,使跟随算法角度能获得及时校准和修正,最终保证EPS系统对超限转角的测量可靠性。
关键词:电动助力转向系统;角度游标算法;角度跟随算法;超限转角测量;可信度评估算法
Abstract: Aiming at the P signal and S signal of Hella torque-angle sensor, the basic working principle of angle measure -ment of EPS system was analyzed, the characteristics of angle cycling of vernier algorithm and angle extension of following algorithm were summarized, and the key factors affecting the effective angle measurement range were identified. Based on this, in the case of over-limit steering angle, the measurement reliability evaluation algorithm of vernier algorithm for angle measurement is proposed. When judging its reliability, the angle of the following algorithm can be timely calibrated and corrected, so as to guarantee the measurement reliability of EPS system for over-limit steering angle.
Keywords: Electric power steering system (EPS); Angle vernier algorithm; Angle following algorithm; Over-limit steering angle measurement; Reliability evaluation algorithm
1 前言
现代汽车配装电动助力转向系统(简称:EPS系统)已非常普及。转角传感器作为EPS系统的核心技术之一,直接影响系统性能,其角度信号对于实现主动回正功能又是必不可少的[1],有转角传感器的回正控制精度和可靠性会更高[2],若缺少了角度位置信息,会给车辆回正控制带来很大的不确定性[3]。同时, EPS系统的跑偏补偿、齿条末端保护等功能,也涉及到角度信号,并且要求角度信号是可靠的。目前,传感器转角测量范围通常为±740°,可以满足常规乘用车要求,但对于商用车或改装车辆等,则不满足要求。鉴于此,本文通过对Hella扭矩转角传感器的P信号和S信号及相关角度算法开展研究,在车辆出现超限转角的情况下,提出了EPS系统如何获得可信的方向盘绝对转角值的算法,供EPS系统工程师设计参考。
2 传感器的基本角度测量
本文研究的EPS系统传感器为Hella非接触交變电磁感应式的扭矩转角传感器,它除了能输出扭矩T信号,还能输出与角度相关的P信号和S信号,均为PWM占空比形式的信号。其中PWM_P信号为40°一个循环,共37个周期,PWM_S信号为296°一个循环,共5个周期,综合角度测量范围为1480°,且P和S信号每个循环的有效PWM数值范围均为12.5%~87.5%[4]。
2.1 游标算法相对角度
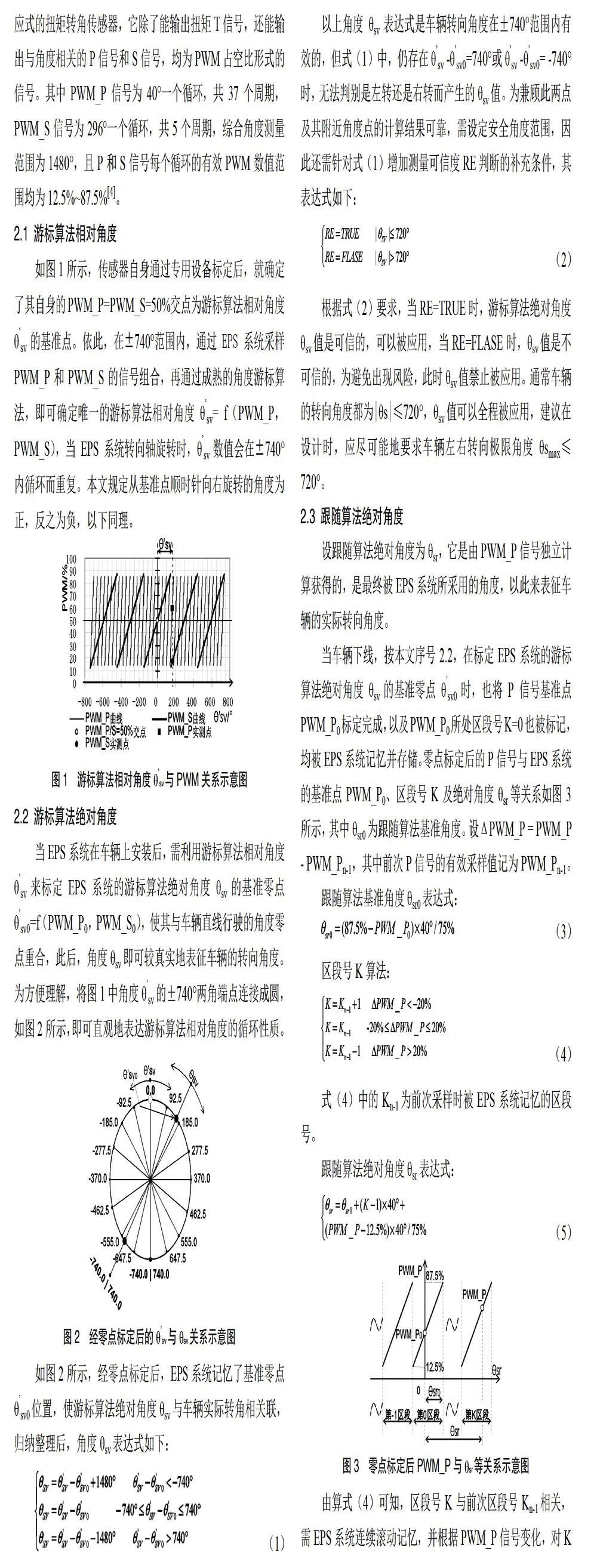
如图1所示,传感器自身通过专用设备标定后,就确定了其自身的PWM_P=PWM_S=50%交点为游标算法相对角度θsv的基准点。依此,在±740°范围内,通过EPS系统采样PWM_P和PWM_S的信号组合,再通过成熟的角度游标算法,即可确定唯一的游标算法相对角度θsv= f(PWM_P,PWM_S),当EPS系统转向轴旋转时,θsv数值会在±740°内循环而重复。本文规定从基准点顺时针向右旋转的角度为正,反之为负,以下同理。
2.2 游标算法绝对角度
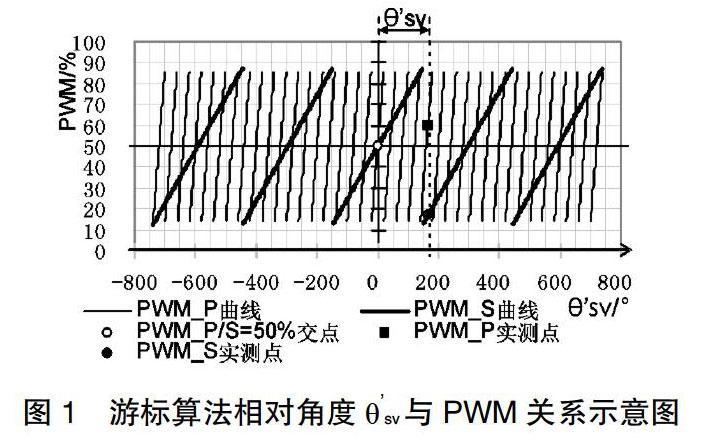
当EPS系统在车辆上安装后,需利用游标算法相对角度θsv来标定EPS系统的游标算法绝对角度θsv的基准零点θsv0=f(PWM_P0,PWM_S0),使其与车辆直线行驶的角度零点重合,此后,角度θsv即可较真实地表征车辆的转向角度。为方便理解,将图1中角度θsv的±740°两角端点连接成圆,如图2所示,即可直观地表达游标算法相对角度的循环性质。
如图2所示,经零点标定后,EPS系统记忆了基准零点θsv0位置,使游标算法绝对角度θsv与车辆实际转角相关联,归纳整理后,角度θsv表达式如下:
以上角度θsv表达式是车辆转向角度在±740°范围内有效的,但式(1)中,仍存在θsv -θsv0=740°或θsv -θsv0= -740°时,无法判别是左转还是右转而产生的θsv值。为兼顾此两点及其附近角度点的计算结果可靠,需设定安全角度范围,因此还需针对式(1)增加测量可信度RE判断的补充条件,其表达式如下:
根据式(2)要求,当RE=TRUE时,游标算法绝对角度θsv值是可信的,可以被应用,当RE=FLASE时,θsv值是不可信的,为避免出现风险,此时θsv值禁止被应用。通常车辆的转向角度都为|θs|≤720°,θsv值可以全程被应用,建议在设计时,应尽可能地要求车辆左右转向极限角度θsmax≤720°。
2.3 跟随算法绝对角度
设跟随算法绝对角度为θsr,它是由PWM_P信号独立计算获得的,是最终被EPS系统所采用的角度,以此来表征车辆的实际转向角度。
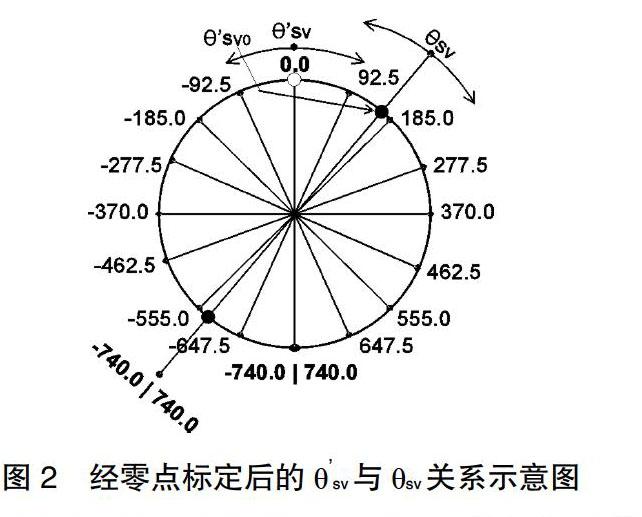
当车辆下线,按本文序号2.2,在标定EPS系统的游标算法绝对角度θsv的基准零点θsv0时,也将P信号基准点PWM_P0标定完成,以及PWM_P0所处区段号K=0也被标记,均被EPS系统记忆并存储。零点标定后的P信号与EPS系统的基准点PWM_P0、区段号K及绝对角度θsr等关系如图3所示,其中θsr0为跟随算法基准角度。设ΔPWM_P = PWM_P - PWM_Pn-1,其中前次P信号的有效采样值记为PWM_Pn-1。
跟随算法基准角度θsr0表达式:
式(4)中的Kn-1为前次采样时被EPS系统记忆的区段号。
跟随算法绝对角度θsr表达式:
由算式(4)可知,区段号K与前次区段号Kn-1相关,需EPS系统连续滚动记忆,并根据PWM_P信号变化,对K值进行累加或累减的跟随性处理,使车辆实际所处的角度区段号与计算结果可保持一致。同时,只要EPS系统不断电,该跟随算法所获得的绝对角度θsr,可延伸至更大的转向角度测量,这也是跟随算法绝对角度θsr被EPS系统所采用的主要原因。
2.4 EPS系统绝对角度
EPS系统绝对角度设为θs,它是被应用于系统与角度相关的各种功能的物理参数,并且使θs=θsr。基于EPS系统工作安全性的要求,θs=θsr是否可靠,需利用上述游标算法绝对角度θsv值与其对比,进行误差监控,并实施报警提示。同时,由于跟随算法绝对角度θsr是依赖于PWM_P采样值,若PWM_P出现异常变化,按式(5)算法,则会引起区段号K的异常突变,而且变异的K值会持续被误用,致使所获得的跟随算法绝对角度θsr值持续不可信。尽管游标算法绝对角度θsv值与相对角度θsv强相关,且也依赖于PWM_P采样值,若PWM_P出现异常变化,也会引起绝对角度θsv值异常突变,当PWM_P异常消除后,则绝对角度θsv值也随之恢复正常。因此,可利用游标算法绝对角度θsv值,定时对区段号K进行校准,校准算法如下:
算式(6)是利用游标算法绝对角度θsv,对其按ROUND()函数定时取整,并在可信度RE=TRUE条件下,对当前K值强行更新,以达到校准目的,依此来维持跟随算法绝对角度θsr的测量可靠性。当EPS系统断电后再上电,也是利用式(6)算法来找回正确的区段号K,恢复跟随算法绝对角度θsr的测量功能。
3 超限转角测量
上述传感器的基本角度测量,是基于车辆转向角度范围在|θs|≤720°内,是有效且可信的。本文超限转角是指车辆转向角度θs已超出传感器的基本角度测量范围,通常指θs>720°的情况。当商用车或改装车辆设计时,通常其转向极限角度θsmax会大于720°,此时上述基本角度测量就不可信了,特别是游标算法绝对角度θsv应被EPS系统禁止应用,只有判断其可信的情况下,才能恢复应用;而跟随算法绝对角度θsr可在系统不断电的情况下,继续被EPS系统使用,但若长时间得不到游标算法绝对角度的校准修正,将会由于P信号的异常波动,出现较大的角度测量误差。
为了分析超限转角与有关传感器的各物理参数变化规律,如表1和表2所示,列举了±900°和± 1100°的超限转角情况下,分别在5种零点位置时,按基本角度测量算法,获得各物理参数值,从中来寻求能处理超限转角的算法规律。
如表1和表2所示数据,当车辆转向角度θs=±900°时,按上述游标算法获得绝对角度θsv=-/+580°,当θs=±1100°时,则θsv= -/+380°,此时的游标算法所获得绝对角度已不可信,同理,在其它超限转角时,所获得的θsv值均不可信。
从以上数据表中,还可以看出以下规律:在超限转角的情况下,EPS系统读取Hella传感器信号PWM_P和PWM_S,并经计算获得的游标算法绝对角度为:左转时θsv=θs+1480°,右转时θsv=θs-1480°。如图4所示,归纳其规律表达式如下:
当车辆转向系统设计时,若已知该车辆最大极限转向角θsmax属于超限转角(θsmax>720°),按式(7)和图4所示的规律,需以已知的θsmax值为基础,增加补充條件来缩小有效角度的测量范围,才能使游标算法获得绝对角度θsv的计算结果可靠。如图4所示的阴影部分,是车辆转向角度在超限情况下,无法达到的区域,若测量的游标算法绝对角度θsv值在此范围内,一定是非超限转角,依此,可设定以下二种测量可信度RE的判断条件及一种禁止应用的判断条件。在车辆转向系统设计中,根据已知极限转向角θsmax,选择其中一条即可。
1)当θsmax< 760°时(8)
2)当760°≤θsmax≤1100°时 (9)
3)当θsmax>1100°时,应拒绝该传感器及对应算法使用于该转向系统设计中。
考虑到方向盘左右转向圈数不对称等误差因素,为可靠起见,对上述已知的极限转向角θsmax应适当地增大50°~100°的安全角度。
根据以上三种情况,需用式(8)或式(9)来替换式(2),以便支持游标算法绝对角度θsv测量可信度的判断,实现超限转角测量的可靠性。通常车辆在转向角不超出一圈的情况下行驶,是最频繁的和较长时间的运行工况,在此工况下均可使RE=TRUE,也使游标算法绝对角度θsv的测量可靠。
4 结论
(1)当驾驶员将方向盘停留在超限转角位置上停车并断电,再使EPS系统重新上电,在此上电初期,游标算法绝对角度θsv值和跟随算法绝对角度θsr值均不可信,EPS系统会存在短时间内,凡与角度相关的功能均被禁用的现象,只有当方向盘转角处于|θs|=|θsv|≤1480°-θsmax时,并保持1s以上,即可恢复EPS系统所有角度测量的可靠性,相关系统功能也同时被恢复使用。当驾驶员规范停车时则不存在此现象。
(2)在车辆行驶中,驾驶员以超限转角来实施转向,此时游标算法绝对角度θsv值是不可信的,将被EPS系统禁用,而跟随算法绝对角度θsr仍可继续测量角度,并被EPS系统使用,但角度θsr在短时内,不能得到角度θsv的校准和修正,会引起少许θsr测量误差,但其误差精度仍可满足EPS系统使用要求。
(3)在实践中,本文提出的EPS系统对超限转角的处理策略和算法,能较好地将Hella传感器的角度测量范围增大至±1100°,可适用于大部分车辆配装EPS系统。
参考文献
[1] 那少珃.用于EPS的非接触电磁感应式角度传感器研究[D].哈尔滨:东北林业大学,2015:1-5.
[2] 崔祥坡,陈国迎,宗长富.基于转角信息的EPS回正控制方法试验研究[J].科学技术与工程,2016(7):92-99.
[3] 何殿福,高伟.基于方向盘角度的电动助力转向系统主动回正控制设计[J].汽车实用技术,2014(10):24-26.
[4] 林联伟,吕莹,焦九顺. EPS转角算法的实现[J].汽车零部件,2018(10):71-74.
