低速高性能无刷双馈电机的直接转矩控制系统
2020-10-21 11:19:02侯晓鑫任瑞敏游国栋张志强
天津科技大学学报 2020年5期
侯晓鑫,任瑞敏,游国栋,张志强
(1. 天津科技大学电子信息与自动化学院,天津 300222;2. 中科和光(天津)应用激光技术研究所有限公司,天津 300300)
随着全球环境的恶化和资源的枯竭,开发各种新能源已成为一项异常紧迫的任务,其中风能作为一种高效可再生的清洁能源受到普遍重视.电机是风力发电系统中最重要的部件,目前应用最广泛的是双馈电机,然而双馈电机中存在的电刷和滑环增加了巨大的维护成本.无刷双馈电机(brushless doubly-fed machine,BDFM)取消了双馈电机的电刷和滑环,通过变频器的功率仅为转差功率,降低了对变频器容量的要求,因此不仅能够降低维护成本和投入成本,而且能够提高系统的可靠性[1-2].BDFM 既可以应用于风力发电系统,也可以应用于风机调速系统,具有成为下一代风力电机的潜力,因此对 BDFM 的研究具有重要的现实意义[3-4].
然而,高性能的控制系统是 BDFM 在实际工业当中得到应用的关键问题之一[5-6].直接转矩控制(direct torque control,DTC)是在矢量控制之后发展起来的又一种新的交流电机高性能控制调速方法[7-9].该方法与矢量控制完全不同,直接转矩控制是直接将定子磁链和转矩作为控制量进行反馈控制,只需要观测定子磁链,对电机转子参数的依赖性小,而且不需要像矢量控制那样进行磁链定向、电流环控制,因此控制结构更加简单,响应更加快速,这种无刷双馈电机的控制策略可以进一步提高电机的动态响应性能.但是,传统的无刷双馈电机直接转矩控制系统中的速度环控制无法兼顾抗跟踪和抑制干扰,尤其是在低速时的性能不佳[10-11].
在异步电机和永磁同步电机上的速度环控制中,比例积分(PI)控制、双自由比例积分速度控制、模糊控制、预测控制、滑模控制等速度控制策略得到了广泛的应用[12-15],相对比 BDFM 的结构和控制机理都要比异步电机和永磁同步电机复杂,这些技术不能直接应用于 BDFM 上.在上述控制策略中,双自由比例积分速度控制不仅继承了 PI控制的物理意义简单、易于实现等优点,而且能够兼顾系统的速度跟随特性和抗干扰性[16-18],因此在无刷双馈电机直接转矩控制的基础上,考虑电机摩擦因数设计了双自由比例积分转速控制器,能够同时兼顾速度跟踪和抑制干扰,尤其是改善低速时的性能.
1 无刷双馈电机数学模型
无刷双馈电机由两个极对数不同的定子绕组和一个特殊的转子绕组组成,其中一个定子绕组直接与电网相连,称为功率绕组;另一个定子绕组与变频器相连,称为控制绕组.两定子绕组间没有直接耦合而是通过转子间接耦合,转子起极数调节器的作用.无刷双馈电机静止坐标系下的数学模型为[1-2]

磁链方程为


式中:l为电感;lpm和lcm分别为功率绕组和控制绕组定转子之间的互感.
无刷双馈电机电磁转矩为

无刷双馈电机的运动方程为

式中:Te和Tl分别为无刷双馈电机的电磁转矩和负载转矩;B为摩擦因数;J为电机轴上的总转动惯量.
2 基于双自由度的无刷双馈电机直接转矩控制系统
2.1 无刷双馈电机直接转矩控制系统
在无刷双馈电机直接转矩控制系统中,通过速度传感器测量的电机转速与给定的转速进行比较,经过PI控制器得到电磁转矩给定值,通过检测功率绕组定子电压和定子电流,控制绕组的定子电压和定子电流,作为控制绕组定子磁链和电磁转矩观测器的输入,磁链和电磁转矩观测器的输出与磁链给定值和电磁转矩给定值做比较,可得定子磁链和电磁转矩偏差.将磁链偏差和电磁转矩偏差分别经过滞环调节器,根据滞环调节器的输出和相应的磁链所在的位置,查找事先制订好的电压矢量开关矢量表(表1),选择相应的空间电压矢量来对逆变器进行控制.无刷双馈电机直接转矩控制系统框图如图 1所示.其中功率绕组和控制绕组定子磁链的观测器采用 电 压 电 流 模 型 ,通过功率绕组和控制绕组定子磁链和电流的叉积可以得到电磁转矩,Te=

图1 无刷双馈电机直接转矩控制系统Fig. 1 Direct torque control system of BDFM

表1 直接转矩控制电压矢量开关矢量Tab. 1 Switching vector of direct torque control voltage vector
2.2 双自由度比例积分转速控制器
为了兼顾低速时无刷双馈电机直接转矩控制系统速度环的跟踪性能和抑制干扰的能力,结合无刷双馈电机的控制特性设计了一种采用速度反馈的双自由度比例积分转速控制器,结构如图 2所示[17-18].其中:N(s)为高频测量噪声;转矩滞环看作是理想环节并忽略磁链谐波.G(s)是考虑摩擦因数的无刷双馈电机(BDFM)运行方程的传递函数.

图2 双自由度比例积分转速控制器结构Fig. 2 Structure of dual degree of freedom proportional integral speed controller
由图 2可以看出,此时速度环输入-输出的传递函数为

速度环负载扰动-输出闭环传递函数为

速度环误差-输出闭环传递函数为

由式(5)—(7)可知:引入反馈控制Fr(s) = Kwp(1 -α)后,由速度环输入-输出、扰动-输出和误差-输出的传递函数可知无刷双馈电机的转速响应特性和负载响应特性不仅取决于系数Kwp和Kwi,而且还受参数α的影响.由此,反馈控制器不仅会对速度环的跟踪性能产生作用,而且还会对速度环抗干扰性产生影响,通过选择合适的反馈控制器,可以灵活实现极点配置.
3 仿真验证
为了验证上述分析的正确性,对基于双自由度的无刷双馈电机直接转矩控制系统进行了仿真研究.无刷双馈电机的转速运行范围为0~1000r/min,额定功率为3.7kW,额定磁链为1.2Wb,额定转矩为30N·m.功率绕组的供电电压和频率为 220V 和50Hz,控制绕组与逆变器连接,逆变器的直流母线电压为 500V.控制系统采用转速外环,控制绕组定子磁链和电磁转矩滞环调节器的上限和下限分别为0.05和-0.05、0.5和-0.5.
图3为PI转速控制器和双自由度比例积分转速控制器下的负载转矩发生突变时无刷双馈电机的响应波形.仿真中,转速给定为 100r/min,磁链给定为1.2Wb,负载转矩为20N·m,在1.1s的时候转矩突变为30N·m,转速环控制器输出的限值为±35.图3(a)和图3(b)分别为PI控制器不同参数和双自由度控制器下的转速和转矩跟踪曲线.由仿真曲线可以看出:当 PI控制器参数为kp=1和kI=4时,转速的响应曲线经过0.3s左右趋于稳定,而且转速存在超调,在负载转矩突变的时候,转速经过一段时间的动态调节后,稳定于给定转速,经过大约0.2s的时间转速调节器能够补偿负载转矩的扰动.随着 PI控制器参数的变化,转速的响应时间几乎不变,超调变小,但是在负载转矩突变的时候需要调节的时间变长;当 PI控制器参数为 kp= 0 .25和kI=1时,调节时间达到了大约0.5s,因此PI控制器无法兼顾抗跟踪和抑制干扰.当采用双自由度比例积分控制器时,控制器参数为Kwp=96和Kwi=96以及α= 1 00/96,由图 3(a)可知,转速的响应曲线经过 0.1s左右趋于稳定且没有超调,在负载转矩突变的时候,对转速几乎没有影响.图 3(c)为双自由度转速控制器下的磁链波形,同时给出了磁链局部放大的变化波形.图 3(d—f)为双自由度转速控制器下的功率绕组 ABC三相电流、控制绕组ABC三相电流和转子绕组ABC三相电流的波形.由图 3(a—f)可知,当电机受到外界干扰(转矩突变)时,转矩几乎是瞬时达到稳定值 30N·m,双自由度转速控制器能够同时兼顾速度跟踪和抑制干扰,在负载突变的条件下验证了系统的稳定性.
图 4为双自由度比例积分转速控制器下的转速发生阶跃变化时无刷双馈电机的动态响应波形.
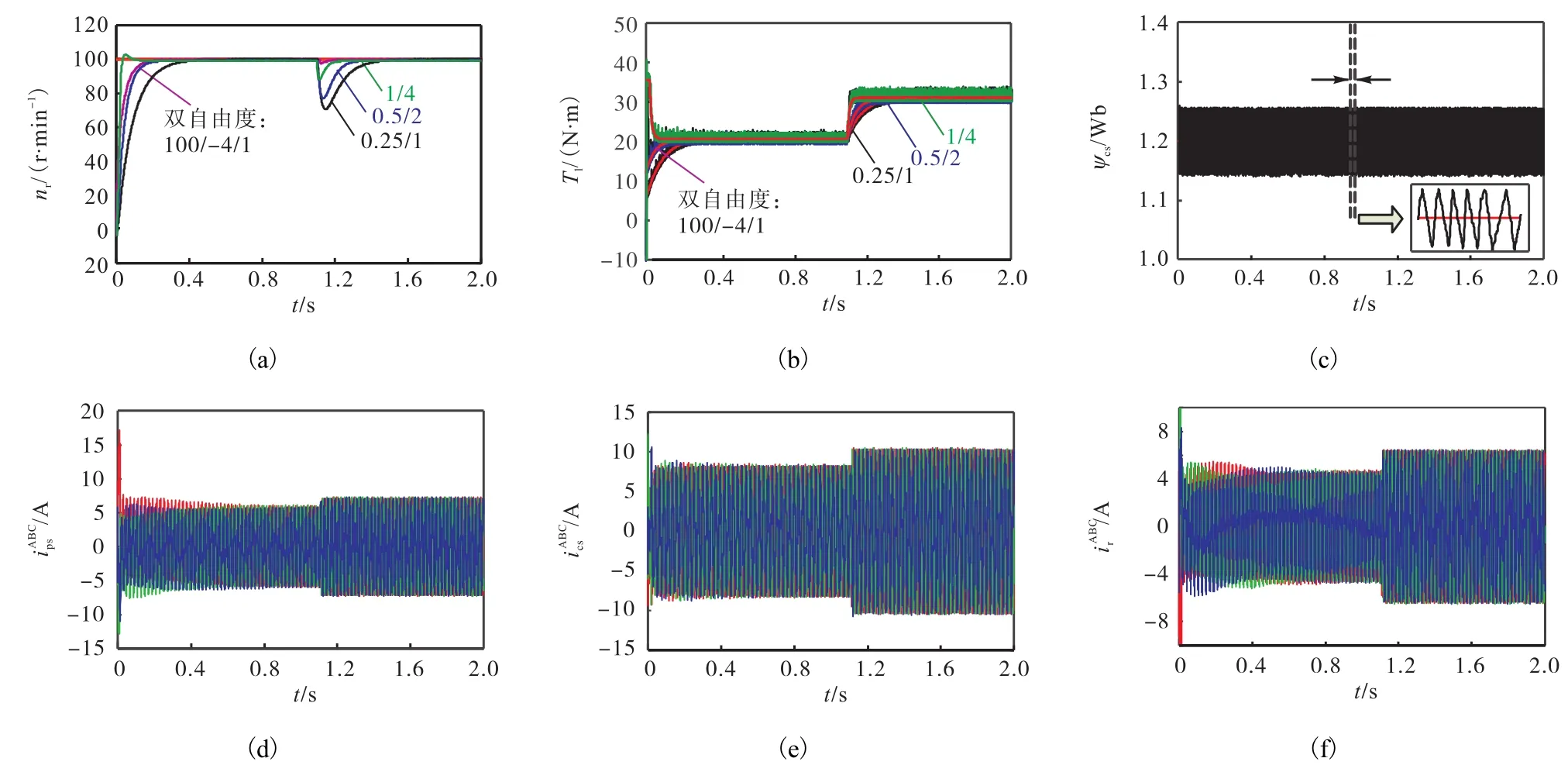
图3 PI转速控制器和双自由度比例积分转速控制器下负载转矩突变时的响应波形Fig. 3 Load torque sudden change response waveform under PI speed controller and double degree of freedom proportional integral speed controller

图4 双自由度比例积分转速控制器下转速发生阶跃变化时的响应波形Fig. 4 Response waveform of speed step change under the double degree of freedom proportional integral speed controller
仿真中,转速给定为 100r/min,在 0.2s时从100r/min变为300r/min,磁链给定为1.2Wb,负载转矩为5N·m.图4(a)为双自由度控制器下的转速跟踪曲线,由跟踪曲线可以看出:当转速发生阶跃变化时,电机的转速能够快速地、无超调地跟踪给定值.图 4(b—f)为双自由度控制器下的转矩、磁链、功率绕组 ABC三相电流、控制绕组 ABC三相电流和转子绕组ABC三相电流的波形.由BDFM的运行原理可知电机的转速为 nr=60( fp±fc) /( pp+pc),其中:fp为功率绕组定子通过电网供电的频率(50Hz);fc为控制绕组定子通过逆变器供电的频率.由转速公式可以看出:在功率绕组定子频率不变时,通过调节控制绕组定子的供电频率就可以调节电机的转速.因此,由图 4(a)和图 4(e)可以看出,当电机的转速由100r/min变为 300r/min时,控制绕组定子的供电频率也发生改变.
由仿真结果可知,基于双自由度的直接转矩控制系统在负载转矩突变时具有良好的调节性能,在转速指令阶跃变化时具有良好的动态特性.控制绕组的定子磁链能够很好地跟踪给定值,转速和转矩的变换几乎对其没有影响.
4 结 论
直接转矩控制是一种普遍适用的反馈控制的设计方法,适用于异步电机也适用于无刷双馈电机,其优点是控制系统对模型和参数的依赖性低;但是直接转矩控制系统常规PI转速控制器不能同时得到较小的电机转矩的阶跃响应超调量和响应时间,以及较强的抗阶跃负载变化的干扰能力.采用双自由度比例积分转速控制器能够同时兼顾速度跟踪和抑制干扰,实现了速度的无超调控制,在不影响稳态精度的前提下,提高了系统的动态响应性能.
猜你喜欢
大电机技术(2022年3期)2022-08-06 07:48:18
防爆电机(2021年6期)2022-01-17 02:40:18
电子制作(2017年1期)2017-05-17 03:54:12
照明工程学报(2016年3期)2016-06-01 12:18:01
电测与仪表(2016年10期)2016-04-12 00:26:38
电测与仪表(2016年2期)2016-04-12 00:24:42
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
云南电力技术(2015年2期)2015-08-23 01:31:52
电测与仪表(2015年16期)2015-04-12 00:44:38
大电机技术(2015年5期)2015-02-27 08:22:27