
X型四旋翼无人机的设计与研究
2020-10-20 06:13李广沈纪元杜彤仲启帅
科技资讯 2020年24期
李广 沈纪元 杜彤 仲启帅
摘 要:从软件姿态算法解析与控制到硬件的各个系统。通过MATLAB等软件来建立无人机的结构模型,确立机体模型。利用MATLAB软件自带的仿真平台,模拟飞行。利用PID模糊控制器和PID算法,来减少飞行时的不稳定性。采用MPU6050系列的姿态控制器,减小与无人机契合带来的误差。电源供电系统采用节能环保,且体积较小的锂电池,它的使用寿命较长,相较于其他类型的电池,锂电池具有较高的能量密度。
关键词:模糊PID MATLAB软件 锂电池 姿态控制器 MPU6050系列
中图分类号:V249 文獻标识码:A 文章编号:1672-3791(2020)08(c)-0097-03
Abstract: From software attitude algorithm analysis and control to hardware each system. The structure model of uav is established by MATLAB and other software. MATLAB software with its own simulation platform to simulate flight. PID fuzzy controller and PID algorithm are used to reduce the instability in flight. The ATTITUDE controller of MPU6050 series is adopted to reduce the error brought by it. The power supply system adopts energy saving and environmental protection, and the small size of lithium battery, its service life is longer, compared with other types of batteries, lithium battery has a higher energy density.
Key Words: Fuzzy PID; MATLAB software; Lithium battery; Attitude controller; MPU6050 series
四旋翼无人机分为“X”型和“+”型,而X型无人机具有代表性。X型无人机在当今的应用范围和应用前景比较广,四旋翼无人机飞行控制系统在无人机中起着核心作用[1],无人机的导航系统的主要部分是由多个灵敏传感器组成的,且其具有较小的重量与体型的特点。可应用于多个场景和场所。
1 软件
下面主要介绍一下关于模型的构建问题。
由于四旋翼无人机中易受多种因素的影响[2],会导致无人机飞行时机身不稳,容易造成事故。通常我们在构建模型时将无人机看成一个有6个自由度的运动刚体。因此,建立的无人机模型是由姿态转动动力学模型和质心平动动力学模型组合而成的。首先用三维设计软件(UG)建立无人机的结构模型,利用主体机架、电机和正反桨之间转动方向上由不同原因导致的不同的数据,来建立无人机的模型。利用Adams软件,对其每一个部分的零件进行数据的定义和编写,使其更符合实际情况,让模型更具有真实性。
1.1 建立仿真系统
四旋翼无人机在机械结构方面和飞行控制方面的数据通过已经建立好的无人机模型数据传输到MATLAB软件中去,看能否运行。利用仿真系统建立飞控系统。在仿真系统中,将无人机看成一个六自由度的刚体,采集无人机基础飞行数据,即俯仰、横滚、偏航的姿态角和加速度的大小。
1.2 计算机体姿态角
姿态角的计算是保障无人机能稳定飞行的重要因素,需要较高的准确性与稳定性。姿态角的精度与误差控制,涉及到无人机的设计。可利用四元数来计算机体的姿态角,每一次转动皆可用四元数表示:
q0为转动幅度;q1、q2、q3为转动的旋转轴。
通过陀螺仪,加速器与磁力计收集数据,然后将3种数据进行相互补充和验证,使得到的新数据更加切和实际,利用所得的数据计算无人机机体的姿态角,以保障无人机平稳飞行。
1.3 利用PID算法
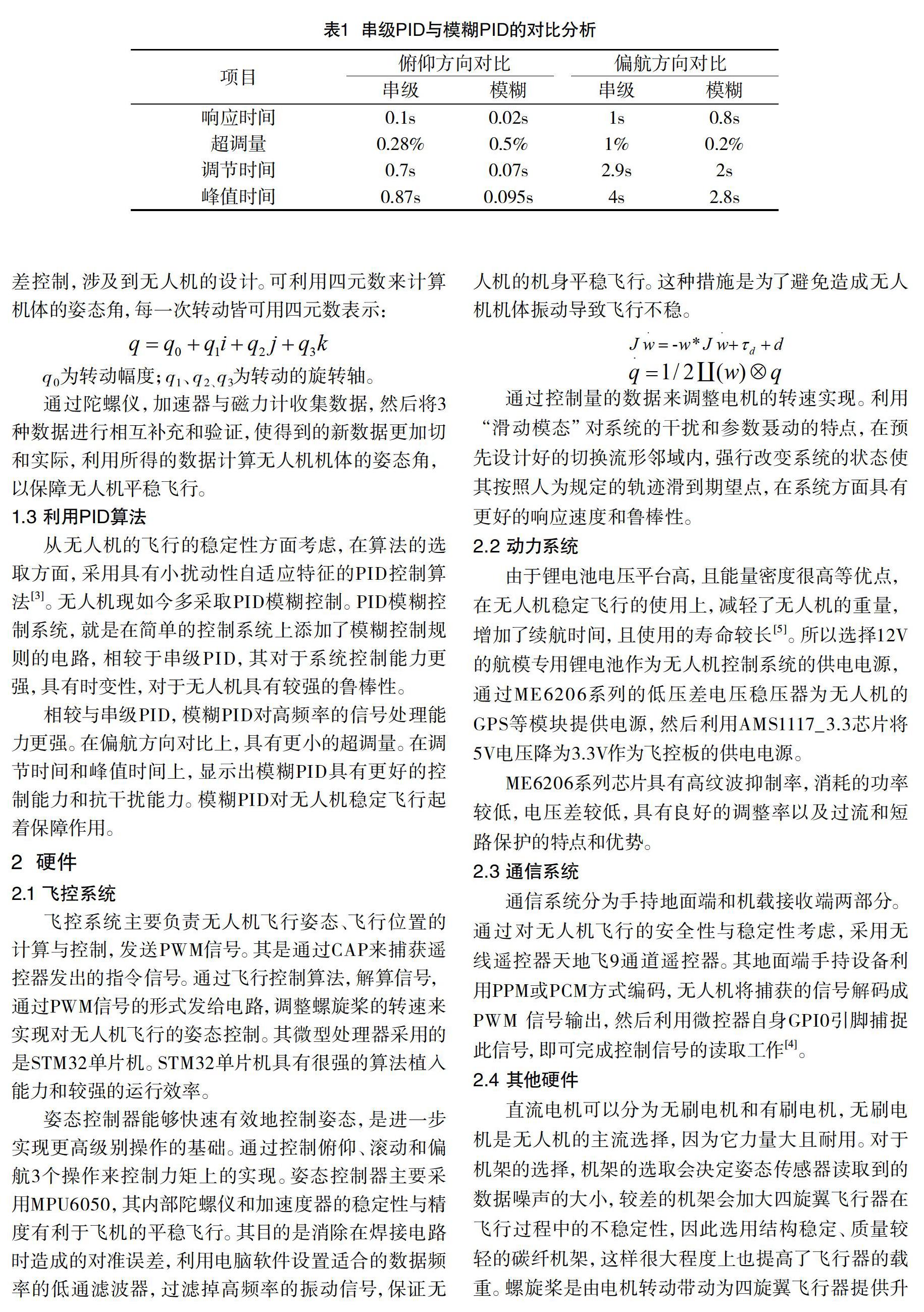
从无人机的飞行的稳定性方面考虑,在算法的选取方面,采用具有小扰动性自适应特征的PID控制算法[3]。无人机现如今多采取PID模糊控制。PID模糊控制系统,就是在简单的控制系统上添加了模糊控制规则的电路,相较于串级PID,其对于系统控制能力更强,具有时变性,对于无人机具有较强的鲁棒性。
相较与串级PID,模糊PID对高频率的信号处理能力更强。在偏航方向对比上,具有更小的超调量。在调节时间和峰值时间上,显示出模糊PID具有更好的控制能力和抗干扰能力。模糊PID对无人机稳定飞行起着保障作用。
2 硬件
2.1 飞控系统
飞控系统主要负责无人机飞行姿态、飞行位置的计算与控制,发送PWM信号。其是通过CAP来捕获遥控器发出的指令信号。通过飞行控制算法,解算信号,通过PWM信号的形式发给电路,调整螺旋桨的转速来实现对无人机飞行的姿态控制。其微型处理器采用的是STM32单片机。STM32单片机具有很强的算法植入能力和较强的运行效率。
姿态控制器能够快速有效地控制姿态,是进一步实现更高级别操作的基础。通过控制俯仰、滚动和偏航3个操作来控制力矩上的实现。姿态控制器主要采用MPU6050,其内部陀螺仪和加速度器的稳定性与精度有利于飞机的平稳飞行。其目的是消除在焊接电路时造成的对准误差,利用电脑软件设置适合的数据频率的低通滤波器,过滤掉高频率的振动信号,保证无人机的机身平稳飞行。这种措施是为了避免造成无人机机体振动导致飞行不稳。
通过控制量的数据来调整电机的转速实现。利用“滑动模态”对系统的干扰和参数聂动的特点,在预先设计好的切换流形邻域内,强行改变系统的状态使其按照人为规定的轨迹滑到期望点,在系统方面具有更好的响应速度和鲁棒性。
2.2 动力系统
由于锂电池电压平台高,且能量密度很高等优点,在无人机稳定飞行的使用上,减轻了无人机的重量,增加了续航时间,且使用的寿命较长[5]。所以选择12V的航模专用锂电池作为无人机控制系统的供电电源,通过ME6206系列的低压差电压稳压器为无人机的GPS等模块提供电源,然后利用AMS1117_3.3芯片将5V电压降为3.3V作为飞控板的供电电源。
ME6206系列芯片具有高纹波抑制率,消耗的功率较低,电压差较低,具有良好的调整率以及过流和短路保护的特点和优势。
2.3 通信系统
通信系统分为手持地面端和机载接收端两部分。通过对无人机飞行的安全性与稳定性考虑,采用无线遥控器天地飞9通道遥控器。其地面端手持设备利用PPM或PCM方式编码,无人机将捕获的信号解码成PWM 信号输出,然后利用微控器自身GPI0引脚捕捉此信号,即可完成控制信号的读取工作[4]。
2.4 其他硬件
直流电机可以分为无刷电机和有刷电机,无刷电机是无人机的主流选择,因为它力量大且耐用。对于机架的选择,机架的选取会决定姿态传感器读取到的数据噪声的大小,较差的机架会加大四旋翼飞行器在飞行过程中的不稳定性,因此选用结构稳定、质量较轻的碳纤机架,这样很大程度上也提高了飞行器的载重。螺旋桨是由电机转动带动为四旋翼飞行器提供升力的。螺旋桨分为正反桨,顺时针方向转的电机需要配正桨,逆时针转的电机需要配反桨。螺旋桨的选取取决于电机。
3 总结与展望
在系統建模分析的时候采用诸多的假设,但与实际上的实验有一定的出入,需要对无人机进行调试。在处理四旋翼无人机的问题时需要注意协调好各个模块之间的关系,一个模块的不注意会导致无人机飞行不稳定,增大飞行的危险性。
在无人机飞行的时候有几个不足之处需要注意:(1)电机和机架的振动大,加速度计无法立即排除掉较大的输入信号,当信号运行时,导致飞机飞行不稳。(2)陀螺仪数据偏差的不断累积会导致无人机姿态不稳。(3)四旋翼无人机需要较高的协调一致性。(4)需要对四旋翼无人机的一些零部件上的参数进行核实,等等,这些不足之处国内正在研究。
相对与传统的固定翼无人机,无人机具有较高的灵活性,可在狭小的空间内飞行,可以垂直起降,在诸多领域都备受青睐。例如无人机用于航拍、地图绘测、喷洒农药,在军事方面可以实时跟拍、充当电子间谍,也可以运送物资。
无人机未来发展趋势无人机系统个体和集体两个层面发展,自主控制为无人机发展大势的核心技术:在个体的无人机方面体现在对无人机自身故障的诊断和自我修复功能方面的提升;在群体的无人机方面体现在协同处理问题的能力方面。
参考文献
[1] 马鸣宇,董朝阳,马思迁,等.基于SO(3)的多四旋翼无人机编队协同控制[J].控制理论与应用,2018,35(9):1229-1238.
[2] 冯凯.多旋翼无人机在电力巡线中的应用[J].机电信息,2018(33):50-51.
[3] 汪梓童.四旋翼无人机姿态控制及抗干扰研究[D].南京邮电大学,2019.
[4] 李昱霄.动态场景下无人机SLAM在智慧城市中的关键技术研究[D].中国科学院大学(中国科学院深圳先进技术研究院),2020.
[5] 王福星.基于粒子群优化算法的多无人机自组织控制[D].南京邮电大学,2019.
[6] 张逗.四旋翼无人机限定时间控制及应用研究[D].南京邮电大学,2019.
猜你喜欢
科学导报(2019年33期)2019-09-03
智富时代(2018年3期)2018-06-11
智富时代(2018年3期)2018-06-11
科技知识动漫(2017年4期)2017-04-15
数学学习与研究(2016年17期)2017-01-17
中国高新技术企业(2016年32期)2016-12-27
科技视界(2016年26期)2016-12-17
科技视界(2016年20期)2016-09-29
科技视界(2016年4期)2016-02-22
科技视界(2015年25期)2015-09-01
