基于CAN通信多通道数据采集系统设计
2020-10-20 05:34方略何洪军高旭
计算技术与自动化 2020年3期
方略 何洪军 高旭

摘 要:实时准确采集康复下肢外骨骼机器人传感器信息对于机器人下一时刻的动作尤为重要。设计了一款基于CAN总线的多通道数据采集系统,以TMS320F2812为核心芯片实现A/D转换,转换后的数据信息通过CAN总线发送至上位机软件CANTest实现数据的读取,实验结果表明,所设计采集系统硬件电路简单,采集精度高,抗干扰能力强,工作迅速可靠。
关键词:下肢康复外骨骼机器人;TMS320F2812;数据采集;CAN总线;多通道;系统设计
中图分类号: TP391 文獻标识码:A
Design of Multi-channel Data Acquisition System
Based on CAN Communication
FANG Lue?,HE Hong-jun,GAO Xu
(The twenty-first Research Institute of China Electronic Technology Group Co.,Ltd.,Shanghai 200030,China)
Abstract:Real-time and accurate acquisition of sensor information for lower extremity exoskeleton rehabilitation robot is particularly important for the next moment of robot action. Based on this,a multi-channel data acquisition system based on CAN bus is designed. A/D conversion is realized with the core chip of TMS320F2812. The converted data information is sent to the upper computer software CANTest through the CAN bus to read the data. The experimental results show that the hardware circuit of the acquisition system designed is simple. The acquisition accuracy is high. The anti-interference ability is strong and it works quickly and reliably.
Key words:rehabilitation exoskeleton robot;TMS320F2812;data acquisition;CAN bus;multichannel;system design
下肢康复外骨骼机器人的功能是辅助下肢残疾病人行走的机器人,机器人硬件系统中用到的压力传感器、倾角传感器等传感设备实时监测病人的重心变化和姿态信息,基于实时的传感器信息来控制康复机器人下一时刻的动作[1-2]。因此,实时准确的传感器信息对于康复机器人的动作尤为重要。基于此,设计了一款以TMS320F2812为核心芯片的多通道数据采集系统,对康复机器人上的传感器信号进行采集,同时通过CAN总线将所采集的数据发送给上位机软件CANTest实现数据的读取,实验结果表明,所设计的采集系统硬件电路简单,能够准确采集到各个传感器电压信号,工作迅速可靠。
1 系统总体设计
TMS320F2812芯片是由TI公司推出的一款32位的定点DSP芯片,该芯片内部集成了丰富的外设资源,设计中主要用到的外设资源有模拟量转换为数字量的ADC采样模块、增强型局域网控制器eCAN模块[3],此外还有电源管理系统以及JTAG在线仿真模块共同构成了采集系统的总体框架,如图1所示。
2 系统硬件设计
设计的硬件电路如图2所示。
2.1 模拟信号采集
模拟信号采集模块首先是对传感器输出信号进行RC滤波处理[4],同时为了使传感器输出模拟信号与TMS320F2812的ADC功能兼容,传感器输出信号经由稳压二极管NUP4201MR6使模拟信号幅值限定在0-3.0 V的范围内[5],模拟信号采集电路原理如图3所示。
基于TMS320F2812内部的ADC模块,对其采集方式、序列发生器的工作模式、时钟分频、采集通道数等进行设置后实现模数转换,TMS320F2812所采集到的模拟电压数值与ADC转换结果寄存器中的数字量的换算关系如下所示[6-7]:
式中:ADCResult为结果寄存器中的数字量;Vinput为输入模拟电压,V;ADCLO为参考电平,实际使用时,通常与AGND连在一起,此时ADCLO的值为0。
系统AD转换程序框图,如图4所示。
2.2 CAN数据通信电路设计
CAN(Controller Area Network)是一种多局域网,在工业自动化控制领域中得以广泛应用[8]。其优势一方面是具有比较高的通信速率,另一方面是抗干扰能力比较强[9],TMS320F2812内部集成了增强型CAN总线接口,总线接口支持CAN2.0B协议,TMS320F2812上的CAN模块与CAN收发器PCA82C250T连接后在CAN总线上完成数据的收发工作[10],CAN收发模块原理如图5所示。
CAN通信的程序框图如图6所示。
图6 CAN通信程序框图
3 系统软件设计
系统软件设计主要包括两部分,第一部分是AD采集部分,第二部分是将AD采集后数据通过CAN总线传输给上位机,通过CANTest来观察采集的数据信息是否正确,在CCS3.3集成开发环境下,通过XDS100V1仿真器与DSP目标板相连接,使用C语言编写程序。采集系统的整体流程图如图7所示。
4 实验结果与分析
4.1 實验步骤、方法及结果
在CCS3.3集成开发环境下,配合可调电源作为输入采集信号,采集信号间隔为0.2 V,即实验分别测试0 V、0.2 V、0.4 V、0.6 V、0.8 V、1.0 V、1.2 V、1.4 V、1.6 V、1.8 V、2.0 V、2.2 V、2.4 V作为采集输入时本研究所提设计采集系统的相关准确度,每个采集输入做30次测量,然后对该30次测量求平均值、绝对误差、相对误差,测试结果如表1所示。
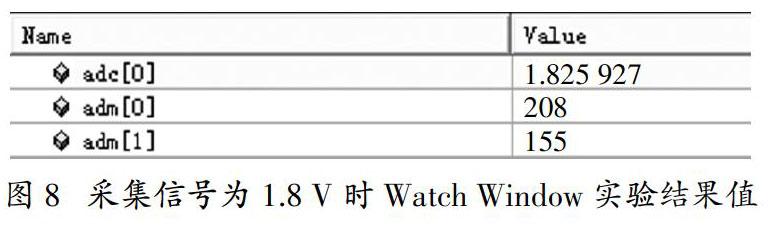
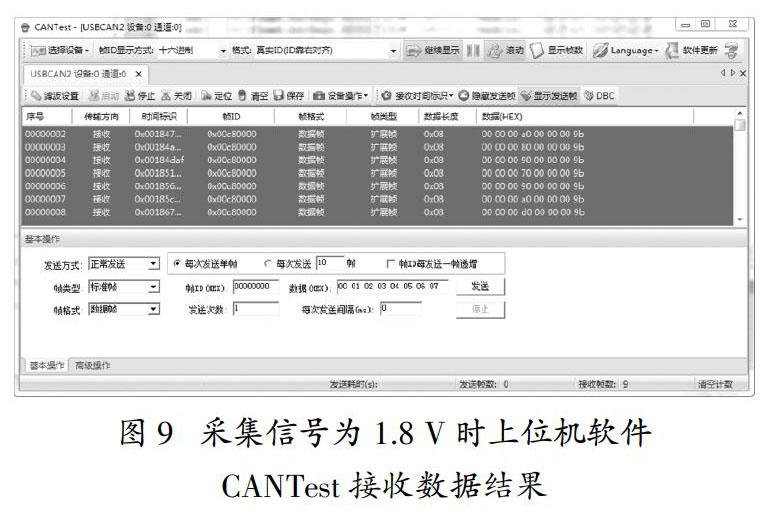
采集到的传感器信号会实时的通过CAN总线传递给上位机,配合上位机软件CANTest来观察TMS320F2812所发送给上位机的数据是否与采集到的信号是否一致。以采集信号为1.8 V为例,测试结果如图8和图9所示。
CANTest接收数据结果
4.2 实验结果分析
图8中adc[0]为采集信号为1.8 V时TMS320F2812所采集到的真实值,该值为1.825 927,adm[0]表示的是所采集信号的低字节数字量,它是要写入到邮箱的低位,该值十进制为208(对应16进制为d0),adm[1]表示的是所采集信号的高字节数字量,它是要写入到邮箱的高位,该值十进制为155(对应16进制为9b)。图9中可以看到序号为00000008上位机所接收到的数据为00 00 00 d0 00 00 00 9b,00 00 00 d0为邮箱的低位数据对应十进制为208,00 00 00 9b为邮箱的高位数据对应十进制为155,可以知道TMS320F2812所发送给上位机的数据和采集到的数据是一致的。
对于同一输入信号进行多次采集求平均值,有效减小随机误差,测量值和真实值之差为绝对误差,绝对误差表征的是测量值对真实值的误差本身的大小,绝对误差与测量真实值之比为相对误差,准确反映采集系统的测量准确度,由测试结果的相对误差可知,所有测试输入信号中相对误差的最大值为0.670%,小于1%。综上所述本研究所提设计采集系统的的准确率小于1%,采集精度能够满足0.01精度要求,由图8和图9可知,采集系统发送给上位机的数据与所采集到的信号一致,本研究所提设计系统能够满足实际采集系统的要求。
5 结 论
基于TMS320F2812数字信号处理器为核心,设计了一款基于CAN通信的多通道数据采集系统,采集系统主要用于对康复外骨骼机器人上的传感器信号进行实时采集,将采集到的信号通过CAN总线发送给上位机以确定康复外骨骼机器人的下一时刻动作,首先完成完成了硬件设计工作,然后在CCS3.3集成开发环境下,完成了对DSP数据采集模块和数据通信模块的软件编写和调试。实验结果表明本研究所提设计的基于CAN通信的TMS320F2812多通道数据采集系统能准确地采集电压信号,并将采集到的电压信号准确发送给上位机,为康复外骨骼机器人辅助病人行走康复奠定了基础。
参考文献
[1] 赵鹏鹏,胡保华,王勇,等. 脚踏式下肢康复机器人足底力检测方法及装置[J]. 机械设计与制造,2018,No.327(5):65-67.
[2] 王年文,朱亦吴,姜文博,等. 下肢外骨骼康复机器人人机交互系统分析[J]. 现代商贸工业,2018,39(1):181-183.
[3] 季国华. 基于DSP的嵌入式系统网络通信技术应用[J]. 无线互联科技,2017(24):3-4.
[4] 朱克佳. 浅析无源RC滤波电路在常用电子系统中的应用[J]. 电子制作,2013(10x):199-199.
[5] 葛俊峰. 基于DSP的无刷直流电机控制系统设计[J]. 赤峰学院学报(自然版),2015(1):47-48.
[6] 曾华荣,吕锋. 基于DSP的多通道数据采集系统[J]. 计算机与数字工程,2005,33(10):154-157.
[7] 代明清,段小虎,邓豹,等. 一种多通道数据采集系统的设计与实现[J]. 航空计算技术,2018,48(2):109-112.
[8] 佚名. CAN总线网络通信影响因素分析与应用探讨[J]. 铁路技术创新,2018(06):80-83.
[9] 张莉. 基于CAN总线的通信系统设计研究[J]. 自动化与仪器仪表,2018(4):91-94.
[10] 博士,吕春天,徐玉兵. 煤层气发动机电控单元的CAN总线设计[J]. 汽车工程师,2009(5):31-34.
猜你喜欢
现代商贸工业(2016年21期)2016-12-26
现代电子技术(2016年22期)2016-12-26
电子技术与软件工程(2016年22期)2016-12-26
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
软件工程(2016年8期)2016-10-25
软件工程(2016年8期)2016-10-25
科技视界(2016年22期)2016-10-18
中国新通信(2016年16期)2016-10-18