
多基地探测拖线阵声呐数据模拟器设计
2020-10-20 01:10李宵宇
指挥控制与仿真 2020年5期
李宵宇,朱 伟
(杭州应用声学研究所,浙江 杭州 310023)
随着潜艇隐身技术的不断发展,被动声呐在水声探测方面的作用逐渐下降。另一方面,主动声呐又容易暴露自身位置。而多基地声呐系统具有收发分置的特点,结合了主动声呐和被动声呐的优点[1]。作为编队协同探测的主要装备,多基地声呐系统近年来成为研究热点[2]。相较收发合置的探测方式,多基地探测拖线阵接收的信号受到平台运动的影响更大,同时还会直接收到发射平台的发射信号。然而,目前声呐信号模拟器的仿真主要针对的是主动声呐的回波信号和目标辐射噪声。因此,本文以编队协同探测为背景,设计了一种多基地声呐系统模拟器,以便协助多基地声呐系统研发测试,为多基地探测信号处理的验证提供支撑。
本文在拖线阵模拟器的基础上,考虑了发射节点、接收节点和目标三者的运动位置关系,进行了多基地位置解算。并且,根据声呐方程,解算了目标回波和直达波强度。再利用远场声源模型进行各阵元时延处理,模拟出到达拖线阵上的主动目标回波和直达波。最后,通过信号处理结果证明了该模拟器达成了预期的设计目标。
1 多基地位置解算
本文首先计算得出发射节点、接收节点、目标在发射信号之后各个时刻位置,即各节点的舰声中心。再根据目标回波和直达波的传播路径,解算出声波到达各节点的位置。由各舰的位置,结合舰声中心/阵声中心折算公式,计算出目标回波到达接收阵的舷角、目标回波从主动声呐出发到达接收阵的总距离,以及直达波到达接收阵的舷角、直达波从主动声呐出发直接到达接收阵的距离。
1.1 各平台运动位置计算
根据发射节点、接收节点、目标的经纬度或者相互之间方位、距离确定三者位置关系,任选一点作为参考点建立坐标系[3]。

图1 多基地舰艇坐标系
如图1所示,发射节点位置为(a,b),接收节点位置为(m,n),目标位置为(x,y)。
设定发射节点的主动声呐在t0时刻发射信号,此时,三个节点位置分别为(a0,b0)、(m0,n0)、(x0,y0)。设定三个节点匀速直线运动,则在ti时刻发射节点的位置如式(1)所示。
(1)
式中,va、vb为发射节点在xy坐标轴上的速度分量。
同理可得,ti时刻接收节点的位置为(mi,ni),目标的位置为(xi,yi)。
为了方便讨论,本文中仅考虑三个节点按照匀速直线运动的情况。在实际情况下,三个节点存在更复杂运动时,只需要缩短式(1)中的运动时间间隔(ti-t0),并随之实时更新对应的va、vb。通过累积短时运动即得到相应各个节点的运动结果(ai,bi)、(mi,ni)和(xi,yi)。
1.2 节点内舰声中心和阵声中心折算
在接收节点内,拖线阵一般是通过拖缆固定在舰艉处,如图2所示。设定艏向角为α,阵向角为β,舰长为L1,缆长为L2。
在讨论各平台运动位置关系时,发射节点位置为(a,b)、接收节点位置为(m,n)、目标位置为(x,y),指的都是舰声中心。所以,接收节点舰声中心位置即为(m,n)。再结合图2所示的位置关系,可以算得拖线阵阵声中心位置(m′,n′),如式(2)所示。
(2)

图2 接收节点拖线阵示意图
1.3 发射回波传播路径计算
如图3所示,发射节点的主动声呐向探测方向发射调频或单频信号,信号接触目标后会被反射形成回波。此时,目标相当于反射回波的声源。因此,设定在t0时刻发射节点主动声呐发射信号,然后,在t1时刻发射信号接触目标,最后,在t2时刻目标回波到达接收节点。

图3 发射回波传播示意图
计算主动发射信号到达目标的传播距离s1,有式(3)成立。
(3)
式中,c为声速。
反射的回波信号从目标到达接收节点,实际是到达接收节点的拖线阵(m′2,n′2)。所以,计算时需要使用式(2)将接收节点舰声中心位置(m2,n2)折算为接收节点拖线阵的阵声中心位置(m′2,n′2)。计算回波信号到达接收阵的距离s2,有式(4)成立。
(4)
式中,c为声速。
根据式(1)、(3)、(4)可算出:发射信号到达目标的时间t1和此时目标舰的位置(x1,y1),回波信号到达接收节点的时间t2和此时接收节点拖线阵的位置(m′2,n′2)。通过进一步计算可得目标回波在拖线阵上的接收舷角以及传播距离。
1.4 直达波传播路径计算
如图4所示,不仅目标会收到主动发射信号,接收节点也会收到一个不经过目标反射,由发射节点直达的主动发射信号,即直达波。并且,该直达波会先于目标回波到达接收节点。

图4 直达波传播示意图
设在t0时刻发射节点的主动声呐发射信号,然后,在t3时刻发射信号接触接收节点的拖线阵,此时,接收节点位置为(m1,n1),接收节点拖线阵位置为(m′1,n′1)。
通过计算直达波传播路径长度s3可得式(5)。实际计算时需要使用式(2),将接收节点舰声中心位置(m1,n1)折算为接收节点阵声中心位置(m′1,n′1)。
(5)
根据式(1)(5)可算出发射信号到达接收节点拖线阵的时间t3和此时接收节点拖线阵的位置(m′1,n′1)。通过进一步计算可得直达波在拖线阵上的接收舷角和传播距离。
2 远场声源时延计算
本文时延计算采用的是平面波模型,即认为声波以平面波的形式传播到各个阵元[4],如图5所示。

图5 拖线阵阵元图
根据发射回波的舷角和距离,结合远场声源模型,将仿真的发射信号进行时延处理,可得目标回波仿真信号。根据直达波的舷角和距离,结合远场声源模型进行时延处理,可得直达波仿真信号。将直达波、发射回波、噪声相加即为各阵元上接收的仿真信号。
2.1 目标回波的时延
目标回波的时延可以分两步处理。一是计算出发射信号从发射节点出发到目标反射,再到接收节点拖线阵第一个阵元的回波距离,进而,通过时延得到第一个阵元自发射信号后T1时刻收到的回波信号。二是计算出拖线阵各阵元之间时延差,进而,得到各阵元参考第一个阵元的时延差ΔTk(k=1,2,…,N,N为拖线阵的阵元数)。
根据1.3节的计算,可得发射信号在t0时刻出发,t2时刻到达接收节点拖线阵。则目标回波传播耗时T1=t2-t0。
如图5所示,设定拖线阵有N个阵元,阵元间距为λ,目标相对接收阵舷角(即目标回波舷角)为θ1,可得各阵元相对第一个阵元时延差为
ΔTk=λ·(k-1)·cos(θ1)/c
(6)
式中,θ1为目标相对接收节点拖线阵舷角(即目标回波舷角),k=1,2,…,N。
通过对第一阵元接收的回波信号进行Tk的时延内插位移处理,可得所有阵元上接收的目标回波仿真信号。
2.2 直达波的时延
直达波的时延计算方法与发射回波相同。直达波到达接收阵第一个阵元耗时T′=t3-t0。直达波到达各阵元的时延差为
ΔTk′=λ·(k-1)·cos(θ2)/c
(7)
式中,θ2为发射节点相对接收节点拖线阵舷角(即直达波舷角),k=1,2,…,N。
3 信噪比仿真
根据主动声呐方程和被动声呐方程,结合多基地探测实际情况,可以得到目标回波和直达波的信号级[5]。目标回波由发射节点发出,经目标反射到达接收节点,因而,其信号级如式(8)所示。直达波由发射节点发出直接到达接收节点,因而,其信号级如式(9)所示。
中国近现代史基本问题研究的特性对于学科属性的定位有着直接的影响,所以在对其进行研究的过程中,应该注意以下几个问题。
Secho=SL+TS-2PL
(8)
Sdirect=SL-PL
(9)
其中,传播损失PL在本文中使用式(10)计算,r为传播距离。
PL=20lgr
(10)
通过回波和直达波信号级S可得模拟信号输入端信噪比如式(11)所示。结合信号处理之后所得输出端信噪比即可验证信噪比仿真结果。
SNRin=S-N
(11)
4 仿真结果验证
设定发射节点的主动声呐分别在0 s、120 s、240 s时刻进行了三次信号发射,各舰的运动信息按照表1进行设定。可以得到各平台在三周期内的运动情况如图6所示。
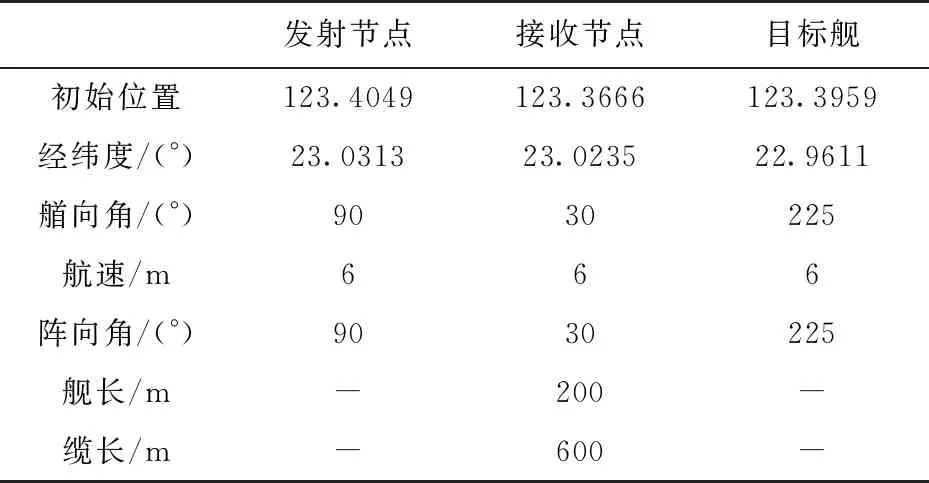
表1 各舰设定运动信息

图6 目标、接收节点、发射节点的运动轨迹图
根据上述舰船运动信息,对拖线阵上接收的信号进行三个周期的模拟。再将模拟数据进行波束形成、匹配滤波等信号处理。针对第一个周期进行分析,该周期内模拟信号处理结果如图7所示。

图7 第一个周期模拟信号处理结果图
设定声源级SL为200 dB,目标强度TS为10 dB,噪声级为40 dB,阵元数量N为48;发射信号为调频信号,带宽B为600 Hz,信号脉宽Te为0.5 s。模拟信号经波束形成和匹配滤波,信噪比获得两次增益。则输出端信噪比为
SNRout=SNRin+10lgN+10 lgBTe
(12)
利用输入端信噪比计算理论输出端信噪比,再与匹配滤波结果的信噪比(如图8、图9、图10、图11所示)相比较。两者比较结果以表2、表3、表4的形式展示。
4.1 第一个周期模拟信号处理结果
将信号处理结果中的直达波信号按照方位维和距离维分解作图,得到舷角-能量图和距离-能量图,即图8、图9。由图可知,在第一个周期内,直达波舷角为40.879°,距离为4 550 m。而理论计算直达波舷角应为40.65°,距离应为4 550.22 m。此外,根据信号处理结果可得输出端信号级为208.72 dB,噪声级为49.73 dB。

图8 第一个周期直达波舷角-能量图

图9 第一个周期直达波距离-能量图
将信号处理结果中的目标回波信号按照方位维和距离维分解作图,得到舷角-能量图和距离-能量图,即图10、图11。由图可知,在第一个周期内,目标回波舷角为122.45°,距离为15 088 m;而理论计算舷角应为122.07°,距离应为15 088.10 m。此外,根据信号处理结果可得,输出端信号级为136.64 dB,噪声级为49.73 dB。

图10 第一个周期目标回波舷角-能量图

图11 第一个周期目标回波距离-能量图
4.2 误差计算与分析
根据三个周期的舷角、距离、输出端信噪比的理论值和测量值可以算出相应误差,三个周期的误差计算结果分别为表2、表3、表4。

表2 第一个周期误差计算表

表3 第二个周期误差计算表

表4 第三个周期误差计算表
从表中可以看出,无论是直达波还是目标回波的舷角、距离误差都非常小,控制在0.8%以内,证明了该模拟器能够较好地仿真出多基地探测中运动舰艇相互之间的方位和距离关系。输出信噪比的误差基本在0.6%以内(除了第三周期目标回波因为能量统计样本数量少导致误差偏大),证明了该模拟器能够较好地仿真出目标回波和直达波的强度。
5 结束语
本文设计了多基地探测拖线阵模拟器,通过信号处理结果验证了该模拟器能够在发射节点、接收节点、目标各自运动的情况下,准确模拟出拖线阵各阵元上接收发射回波和直达波的方位距离和强度特征。该模拟器较之以往的声呐模拟器更加适应编队协同水声探测的发展趋势,满足协助多基地声呐系统研发测试的要求,具有良好的工程应用价值。
本文设计的模拟器仅考虑三个节点的情况。实际作战训练中除了发射节点、接收节点、目标之外可能存在干扰目标,或者有多个发射节点和接收节点。需在今后的工作中,进一步深入研究和分析。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
现代仪器与医疗(2022年1期)2022-04-19
汽车实用技术(2022年5期)2022-04-02
北京理工大学学报(2021年12期)2022-01-13
故事作文·高年级(2021年4期)2021-05-06
数字海洋与水下攻防(2020年5期)2021-01-04
舰船电子对抗(2020年1期)2020-04-27
北京航空航天大学学报(2019年9期)2019-10-26
创新时代(2017年10期)2017-11-09
现代兵器(2016年12期)2016-12-22
