农用无人植保机远程控制系统操作终端设计
2020-10-19 01:54周俊平
农机化研究 2020年12期
周俊平
(鹤壁汽车工程职业学院,河南 鹤壁 458030)
0 引言
近年来,我国农用无人植保机的应用范围逐渐扩大,在提高农业种植、定期养护作业效率的同时,降低了人工作业强度。据大量查阅文献可知:一方面,国内外的无人植保机技术水平正朝着智能化、产业化、精准化方向发展,基于整机本体装置的组构件研究与施药作业的环境信息相结合已成为一种趋势;另一方面,针对无人植保机实际喷雾施药效果的研究、相关联物理参数与场参数的调控亦是热门课题。为此,笔者在借鉴相关学者研究思路与成果的基础上,以提高机体的作业准确率为目标,针对植保机的远程控制系统的操作终端进行了试验性探究。
1 无人植保机控制概述
无人植保机作为一种远程遥控实时作业的飞行装置,控制系统中涵盖了通信、FRID、精准定位及数据处理核心运算规则。一般而言,一套完整的无人植保机具备机械、动力及控制三大功能。图1为某一农用无人植保机进行现场作业场景,体现了高效化农业生产的特征。

图1 农用无人植保机施药作业现场图Fig.1 Working image of pesticide application by the agricultural
工作时,通过自动化系统对田间信息进行判定与采集,经数据传输模块发送至远程的控制显示终端,融入了嵌入式数据移植机理的控制系统,拥有友好型操作终端。图2为植保机的远程控制系统控制流程。由图2可知:植保机的飞控系统中央处理单元是传感器控制单元与植保机执行机构的中枢系统,具有综合信息处理功能,经过姿态接收数据处理与智能通信数模转换到达地面的远程监控终端。
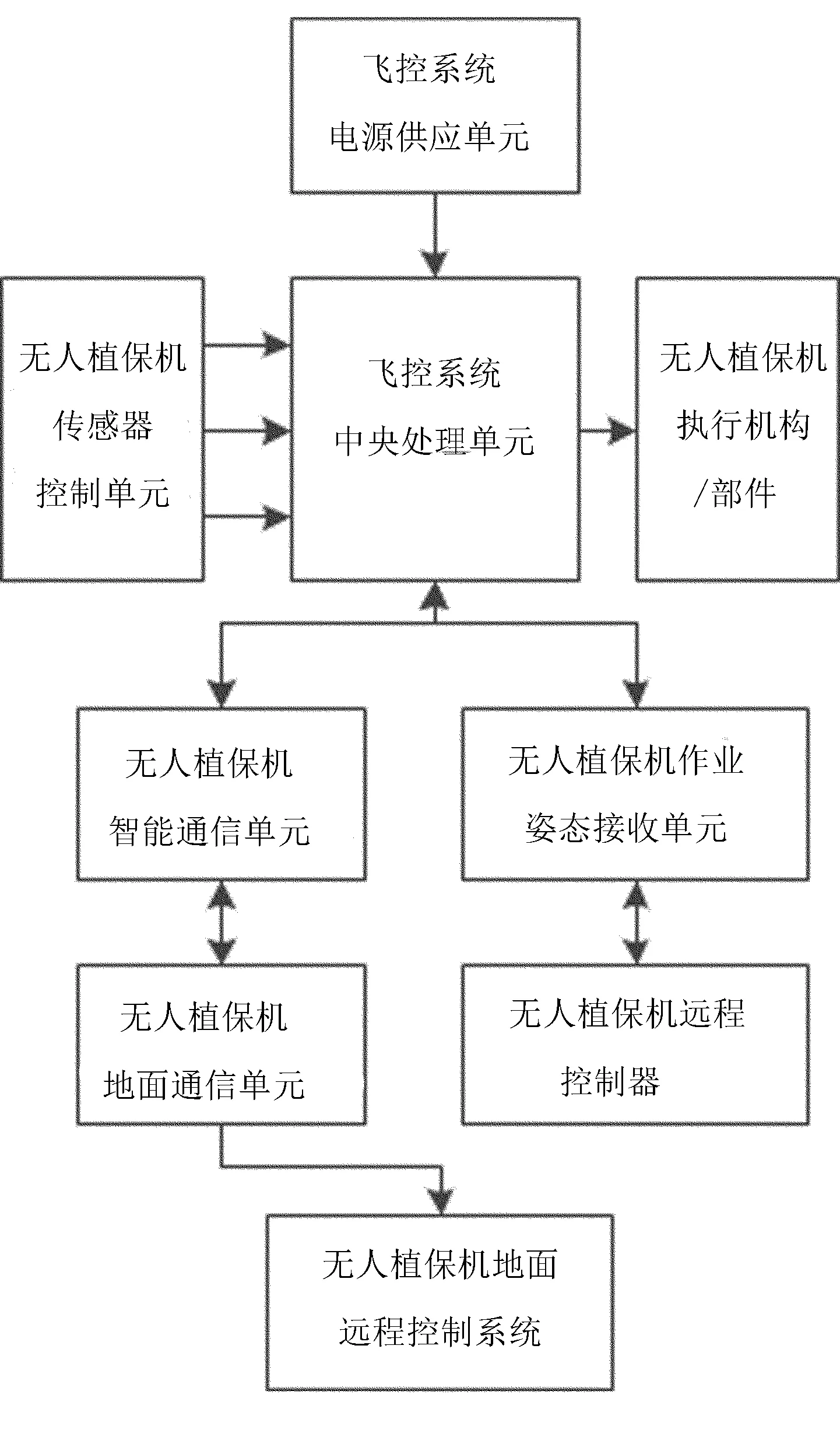
图2 农用无人植保机远程控制系统控制流程简图Fig.2 Control flow chart of remote control system for agricultural plant protection UAV plant protection UAV
2 植保机远程控制系统设计
2.1 控制模型建立
依据无人植保机作业特点,考虑飞行参数传递至远程控制系统中的能耗数据损失,得出控系统的传感装置测量参数补偿方程为
(1)
式中h—无人植保机整机实际作业飞行高度;
εa—无人植保机作业过程雷达监测噪声;
εb—无人植保机作业过程GPS监测噪声;
εc—无人植保机作业过程加速度计监测噪声。
进一步细化无人植保机作业过程的稳定施药与避障功能实现,针对避障设计姿态控制与评估系统,同时配备监测精度高的障碍物检测器;当异常状况发生时,按照避障算法执行指令。同时,该植保机的控制状态归属于非线性动力学约束模型,则建立控制模型为
(2)
式中xi、yi、zi—植保机作业飞行坐标;
Vi—植保机作业飞行速度;
θi—植保机的进攻角度;
Ψi—植保机的方向角度;
u1i—控制植保机进攻角度参量;
u2i—控制植保机方向角度参量。
Xi=[xi,yi,zi,θi,Ψi]T—植保机作业状态变量;
Ui=[u1i,u2i]T—植保机远程控制系统向量。
2.2 控制系统软件设计
对无人植保机控制系统进行软件设计,以数据准确控制与处理、信息实时通信与调控为切入点,确定其控制系统的软件设计结构框架,如图3所示。设定无人植保机的作业位姿坐标系,高度参数监测、GPS定位及速度调控装置经数据精准化处理后为飞控监控系统核心部分,经控制系统电机分配求解后到达植保机的动力装置,在整机本体与远程监控系统间形成互相制约关系。
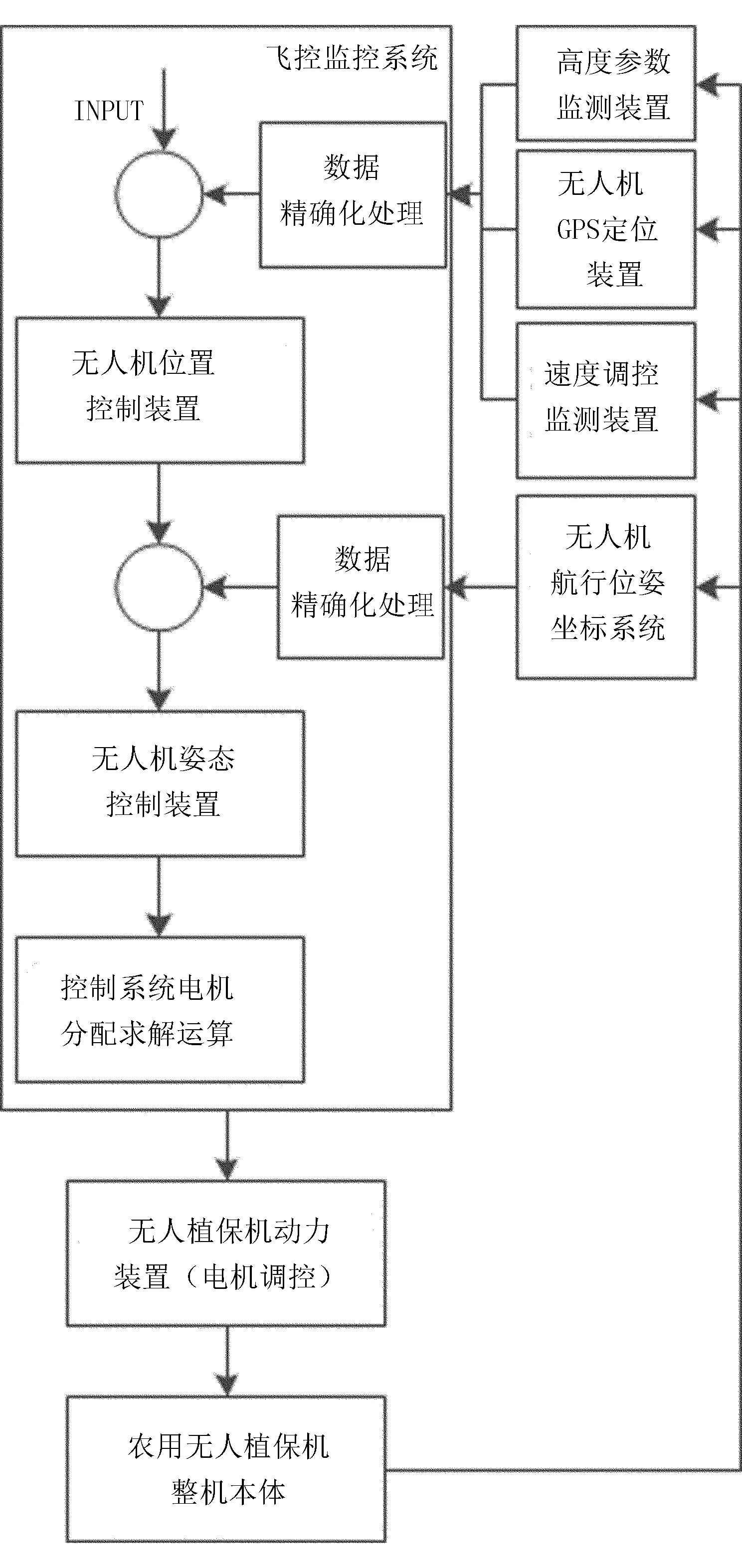
图3 农用无人植保机控制系统软件设计结构简图Fig.3 Software design structural sketch of the remote control system for agricultural plant protection UAV
针对远程的数据处理,从采集接收处理与控制显示全流程进行把控;同时,依据飞行操控预实现的目标编制操纵函数,并配备完整的故障检测单元与数据传输接口等,形成如图4所示的无人植保机控制系统自动飞行作业流程。由图4可知:开启自动飞行模式后,首先判定植保机满足飞行的基本参数条件,再进行各部件执行动作。其中,飞行作业过程中各航点的信息位置指令与高度阈值的符合性是决定植保机执行降落、续航或返航的关键因素。

图4 农用无人植保机控制系统自动飞行作业流程简图Fig.4 Flow chart of automatic flight operation for the control system of the agricultural plant protection UAV
针对获取植保机空中作业信息的采集节点各自进行RF帧解析和GPS帧解析,同时着重考虑机体运行的速度与位置PID控制与闭环反馈环节,对该无人植保机远程控制系统的后台信号姿态解算库、传感位置数据获取输出库、终端操作终端显示控制进行合理解析编译。相关控制程序片段如下:
…
#get list of libraries
Include $(MAKE_INC)
LIBTOKENS:=$(LIBRARIES)
#Find sketchbook libraries referenced by the
sketch.
#Include paths for sketch libraries
SKETCHBOOK:=$(wildcard$(addprefix
$( SKETCHBOOK)/ libraries/,
$( LIBTOKENS)))
SKETCHLIBNAMES:=$(notdir$
(SKETCHLIBS))
…
SKETCHLIBINCLUDES:=-I$(SKETCHBOOK)
/ libraries/- I$(BUILDROOT) / libraries/- I$
(BUILDROOT) / libraries/GCS_MAVLink/
SKETCHLIBSRCRELATIVE:=$(subst
$( SKETCHBOOK)/,,$(SKETCHLIBSRCS))
…
2.3 控制系统硬件配置
针对植保机远程控制系统进行硬件配置。根据实现的功能不同,合理选择地面控制系统的组件,保证无线数据传输单元的畅通性,机体本身则选用角度、位姿传感装置及速度实时监控仪表等,两者形成对接化的统一参数。
植保机作业过程的形态与远程控制系统的通信模块采用UART传输装置,利用成熟的I/D输入输出技术,进行如表1所示的通信核心参数设置,保证控制系统的接收装置灵敏度可达10-10mW以上。

表1 植保机远程控制系统通信参数设置Table 1 Setting of the communication parameters for the remote control System of plant protection UAV
选择GSM模块为TC35i型,图5为农用无人植保机远程控制系统硬件核心电路。由图5可知:内部SIM卡的引脚处于高电平位置是控制系统进行工作的先决条件,数据则通过ZIF40主体连接器进行传递与发送,单片机作为控制系统的中间处理平台,整个核心电路电控压力为5~12V。

图5 农用无人植保机远程控制系统硬件核心电路Fig.5 Hardware core circuit of remote control system for agricultural unmanned plant protection aircraft
控制系统的关键性硬件选择尺寸小巧的16bit陀螺芯片、14bit加速度芯片和具有三维角度信息获取的角速度传感装置,基本参数如表2所示。其灵敏温度误差为±2%,非线性误差为0.2%FS,可满足无人机控制系统要求。

表2 农用无人植保机远程控制用角速度传感装置参数表Table 2 Parameters table of the angular velocity sensor for remote control of the agricultural plant protection UAV
3 植保机远程控制设计仿真
3.1 条件设置
进行农用无人植保机远程控制系统设计可行性试验,如图6所示。在满足关键稳定试验条件的基础上,选择互补滤波融合算法,设定整机主要组件的配置规格及数量,如表3所示。暂不考虑外界信息的轻度扰动,确保远程控制系统运行与田间无人机机体作业信息的协调一致度,展开不同坡度飞行下的远程控制参数变化仿真。

表3 终端设计试验用农用无人植保机主要组件配置Table 3 Configuration of main components of the agricultural unmanned plant protection aircraft for the terminal design test

1.控制系统主控板 2.飞行姿态传感装置 3.无线数据传输装置 4.高度检测装置图6 农用无人植保机远程控制性能试验装置Fig.6 Performance test device for the remote control for the agricultural unmanned plant protection aircraft
3.2 过程分析
植保机远程控制系统核心指令功能的实现流,如图7所示。在制动导向、稳定组件与执行指令的分系统共同配合下,经各负责模块的位姿算法应用,以VM Workstation为载体,多次编译模拟及调试,完善后台数据处理,得到如图8所示的农用无人植保机远程控制系统终端显示信息。

图7 农用无人植保机远程控制系统核心指令功能实现Fig.7 Core instruction function implementation of the remote control system for agricultural unmanned plant protection aircraft

图8 农用无人植保机远程控制终端显示Fig.8 Display of the remote control terminal of the agricultural unmanned plant protection aircraft
该终端是个综合功能的监控平台,可均匀化显示整个植保机作业的远程监控主要参数,如机体的转弯速率、运行航迹、飞行角度、离地高度等。同时,具备作业前监控信息初始化配置、保存与自动加载作用,可对无人植保机的远程控制进行指令传输,实现无人植保机喷施作业的高效可视化管控。
利用该操作终端,可根据机载药量剩余对续航时间进行监控,根据断点经纬度数据提前做出计算与返航指令或者选择就近降落指令,完成1次最佳无人机喷施作业。
以远程控制无人机高度h作为评定指标,得到系列关键性试验数据,如表4所示。由表4可知:分别设定飞行坡度为15°~35°等4组数据,各进行有效试验30次,试验系统的作业平均高度与实际植保机作业平均高度的误差可控制在±6.5cm范围内,小于无人植保机监控平台对高度检测误差要求,远程控制系统终端设计可行。

表4 植保机远程控制系统试验数据统计Table 4 Test data statistics of remote control system of plant protection UAV
4 结论
1)针对无人植保机作业过程的控制原理,对其远程控制系统进行综合设计,建立了参数精准控制模型,并后台编制稳定可行的控制与调节程序,匹配合适的硬件组件后,形成完整的控制系统。
2)依据远程控制理论,进行该植保机远程控制系统设计仿真及试验。结果表明:通过利用飞控关键性能指令,得到可对无人植保机位姿与作业信息进行实时跟踪的可视化终端监控平台,且在不同的飞行坡度下,系统的作业平均高度与实际植保机作业平均高度误差波动为-3.6~+6.3cm,满足可控误差要求。
猜你喜欢
广西植保(2021年4期)2022-01-06
今日农业(2021年17期)2021-11-26
湖北农机化(2020年4期)2020-07-24
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
新农业(2017年2期)2017-11-06
岷峨诗稿(2017年4期)2017-04-20
新高考(英语进阶)(2017年12期)2017-02-26
新农业(2016年21期)2016-08-16
新农业(2016年22期)2016-08-16