基于字符识别的收割机机器视觉研究
2020-10-17 01:04:28刘学
农机化研究 2020年10期
刘 学
(承德石油高等专科学校,河北 承德 067000)
0 引言
当前自动驾驶技术发展迅速,已经取得了很多成果,如果农机巨头与互联网巨头相携手,专门研发智能农机和智慧农业,一定会掀起无人农机技术新浪潮。2018年,雷沃重工与百度签署战略合作协议,共同实现自动驾驶量产的目标,在自动驾驶技术及大数据分析等业务领域展开深度合作。这是雷沃作为农机企业,为农业生产提供更智能、更具开放性的农机装备和便捷高效的信息化服务,在深刻把握行业发展趋势的基础上做出的又一重大举措。具备无人驾驶技术的农机需要有自动导航功能,需要更加智能化的机器视觉系统,如果将字符识别技术引入到收割机的机器视觉系统中,可以有效提高导航系统的自动识别能力和识别精度。
1 基于字符识别技术的农机导航
OCR技术是光学字符识别技术的缩写,通过扫描等光学输入方式将各种印刷品转换为图像信息,然后再利用字符识别技术将图像转换为文字输入到计算机中。在英语字符翻译过程中,一些翻译工具也采用了字符识别技术(如迅捷英语翻译工具),通过将图像文字进行字符识别,可以自动地将印刷品上的文字进行翻译,大大提高了翻译的效率。
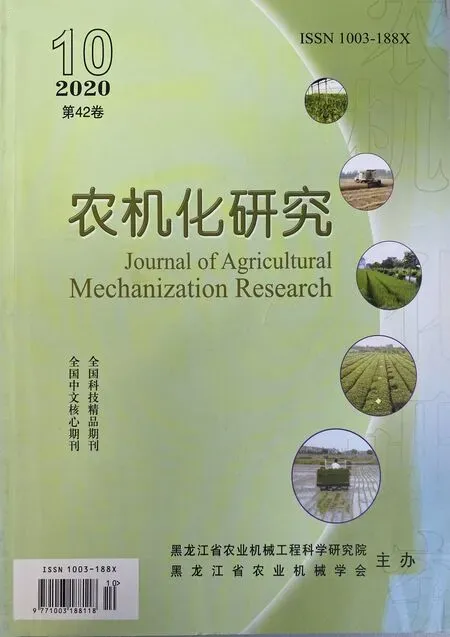
在进行无人驾驶收割机视觉系统设计时,为实现自动导航,可在作业区域设置导航线,视觉系统识别导航线位置后沿着导航线行走,从而实现自主导航。在视觉系统对导航线进行识别时,为提高识别的智能化水平和识别精度,可将字符识别技术引入到视觉系统的设计上。整个导航线的识别流程如图1所示。
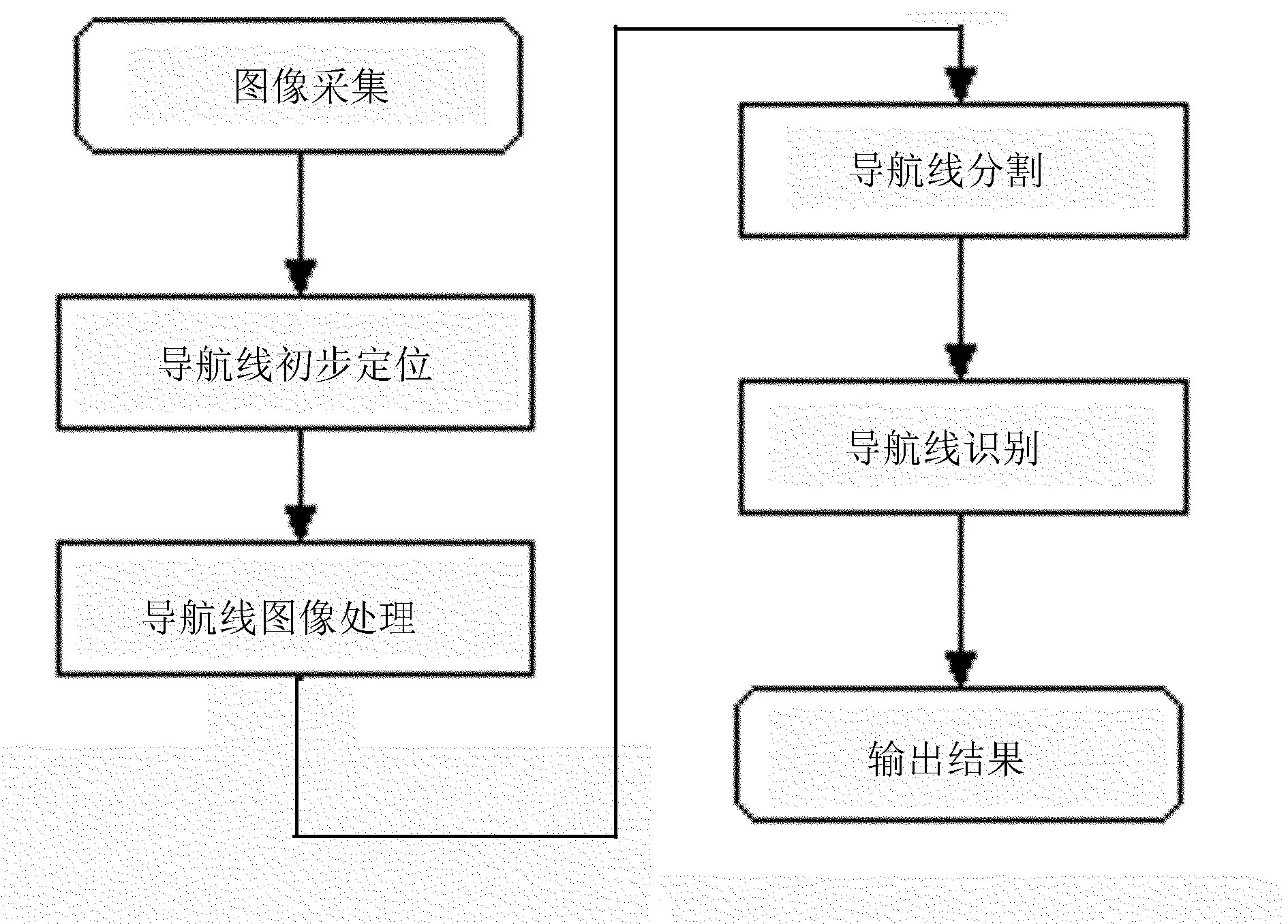
图1 导航线识别流程
工作时,收割机视觉系统首先对导航线进行图像采集,初步对导航线进行定位,然后利用翻译工具的字符识别技术对导航线进行分割,最后识别导航线,收割机沿着导航线行走实现自主导航。
2 基于字符识别的视觉导航图像处理
为了实现收割机的自主导航,在收割机作业区域设置导航标线,收割机视觉系统识别导航标线位置后可实时地沿着导航线行走,从而实现自主化作业。在导航线识别时,收割机首先要通过视觉系统对导航线图像进行采集,然后通过图像处理技术,依据字符识别理论对导航线进行识别。在进行图像处理时,为了有效提取导航线,首先要排出因为作业环境造成的图像干扰,因为干扰后的图像会发生退化。一般来说,退化图像的数学模型可以简单地描述为
g(x,y)=Hf(x,y)
(1)
其中,f(x,y)为成像景物,H为综合退化因子,g(x,y)为退化图像。
图像f(x,y)可以表示为
(2)
用卷积符号表示为
f(x,y)=f(x,y)·δ(x,y)
(3)
f(x-a,y-β)=f(x,y)·δ(x-a,y-β)
(4)
其中,f(α,β)为像素点的特性函数,δ(x-α,y-β)为冲击响应。假定成像系统是线性移不变系统,干扰图像模型如图2所示。
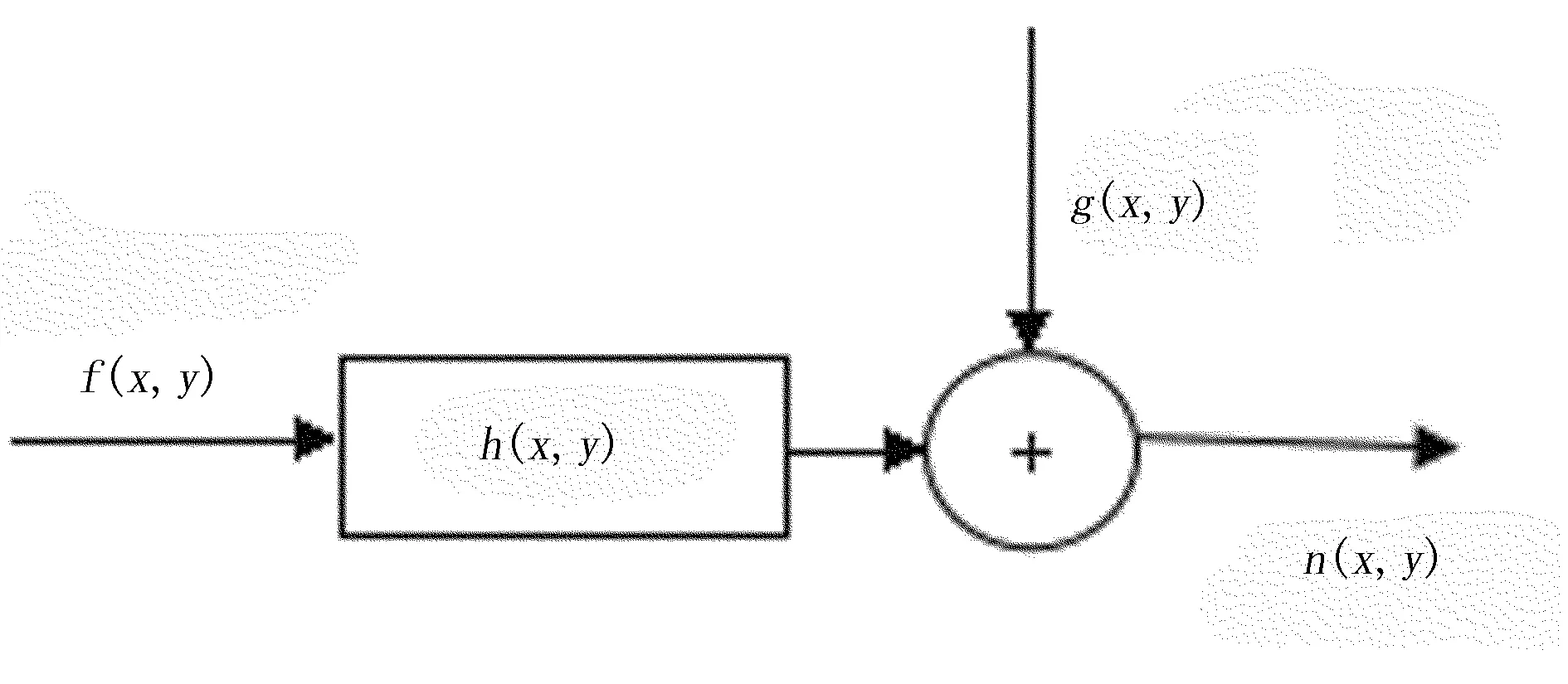
图2 干扰图像模型
为了使图像复原,可以采用逆滤波的方法,将图像进行空间域和频域的傅里叶变换,通过逆滤波将图像由频率域再变换回空间域,从而可以得到复原图像。在理想条件下,则
(5)
式(5)两边进行傅里叶变换得
G(u,v)=F(u,v)H(u,v)
(6)
则原始图像为
(7)
为了提取图像中的导航线,需要对图像进行灰度化处理。灰度化处理主要是将24位的真彩图像转换为8位的灰度图像,公式为
C=xR+yG+zB,x+y+z=1
(8)
其中,R、G、B为三基色,x、y、z为3种最基本的颜色系数,C为转换之后的颜色。在进行导航线识别时,依据字符识别的原理,提前做好视觉系统导航线的模板,通过将采集得到的导航线和模板导航线进行对比,最终识别确定导航线。在进行导航线识别时,首先要对导航线进行位置定位,基本流程如图3所示。

图3 导航线初步定位
在导航线初步确定时,首先要采集导航线的图像,然后将其进行边缘提取,通过简单的图像处理后进行一次定位;定位完成还要进行二次准确定位,再继续进行图像处理。流程如图4所示。
图4 导航位置线识别过程
在对导航线采集图像进行二值化处理后,利用垂直投影的方法对导航线进行切分,然后进行识别,最后输出相应的结果。收割机在进行作业时,可以沿着导航位置线行走,实现自主化作业。
3 基于字符识别的收割机视觉系统测试
基于字符识别的图像分割技术在机器视觉系统中有着广泛的应用,如果将其引入到收割机的视觉系统中,对于实现收割机的无人驾驶具有重要的意义。目前,我国已经研发出无人驾驶收割机,如图5所示。
图5为江苏农场我国首台无人驾驶收割机作业场景。收割机作业时,完全依靠自身的视觉系统对作业区域进行定位,实现了自主导航和自动化作业。本次模拟这种作业场景,以翻译工具OCR字符识别为理论依据,采用图像处理技术对收割机的视觉系统进行设计,主要以导航线的识别来说明设计的视觉系统的基本原理。导航线的定位过程如图6所示。

图5 无人驾驶收割机作业场景

图6 导航线定位过程
为了实现收割机的自主导航功能,在作业区域设置了导航位置线,主要通过视觉系统的字符识别方法对导航线进行提取识别,通过对原始图像的采集、图像增强处理、边缘提取及图像别等,最终对导航线进行定位。在定位导航位置线时,采用了垂直投影扫描的方法,通过垂直扫描投影可以得到图像的灰度值曲线,如图7所示。

图7 图像灰度值扫描曲线
由图7可知:通过图像垂直投影,可以成功地得到二值化图像,利用图像增强处理后可以使图像的轮廓更加清晰,便于边缘的提取。最终得到的视觉导航线如图8所示。

图8 垂直投影图像
通过基于字符识别技术的图像处理,可以成功地得到清晰的导航线。收割机在进行自主作业时,可以沿着导航线的位置实现自主化作业。
通过收割机视觉系统的识别技术还可以得到导航线的位置坐标(见图1),收割机在进行自主行走时还可以根据实时位置坐标来修正行走路线,最终实现准确的自主导航。

表1 导航线位置坐标表
4 结论
为了提高收割机视觉系统的图像识别能力,将基于翻译工具的字符识别技术引入到了视觉系统的设计上,通过对导航线图像的滤波、灰度处理和图像增强后,实现导航线的定位和提取,从而实现自主导航功能。为了验证方案的可行性,以导航线图像的处理和识别为研究目的进行了测试,结果表明:采用基于翻译工具的字符识别技术可以成功地实现导航位置线的提取,且可得到实时位置坐标,为收割机的自主行走提供了准确的数据支持。
猜你喜欢
中国石油石化(2021年8期)2021-03-30 12:39:14
今日农业(2019年11期)2019-08-15 00:56:32
电子制作(2018年18期)2018-11-14 01:48:20
成都信息工程大学学报(2017年3期)2017-11-09 02:56:12
中国公共安全(2017年8期)2017-10-13 08:12:21
中国公共安全(2017年8期)2017-10-13 08:12:20
创新作文(3-4年级)(2016年5期)2017-05-16 09:07:27
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01 04:06:38
新农业(2016年19期)2016-08-16 12:00:18
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:29