
基于先进通信技术的农田灌溉系统研究
2020-10-17 01:16:44白振林
农机化研究 2020年11期
唐 磊,白振林
(石家庄信息工程职业学院,石家庄 050000)
0 引言
我国是一个农业大国,灌溉用水量巨大,而我国又是水资源匮乏的国家,可用淡水资源仅占总用水量的1/2。目前,我国农村的灌溉方式大部分仍采用人工灌溉,灌溉周期完全依靠人的经验,造成了较低的农业灌溉用水率和较多的水资源的浪费[1-2]。农作物的过度灌溉或者干旱将导致农作物烂根或者生长过慢,降低了农作物产量。因此,发展智能节水灌溉、实时监控农作物生长环境,实行精准灌溉技术迫在眉睫。
自动灌溉技术是以土壤的温湿度、肥料状态及农作物的种类等信息作为主要依据,通过实时监测的方法决定灌溉的周期。传统的漫灌方式易造成水资源的浪费、土壤肥力的流失,且需要工人对关系效果进行监控;而自动灌溉技术可以提高水资源利用率,节省人力物力等资源,因此采用自动灌溉技术进行农田灌溉。
灌溉系统的远程监控室用于对农田状态的监控,其通信环节是保证远程监控能够运行的关键步骤。一般传统的农业信息传输方式为无线传输方式,但由于农田环境气候变化、地势较为复杂,导致信息传输不稳定,甚至在信息传输过程中出现安全问题。电力线通信是利用电力线作为通信的媒介,把信号以载波的方式进行通信的技术手段[3]。该通信方式不需要重新布线,具有成本低、信号传输速度快和稳定的优[4-5]。因此,本文将电力线通信方式用于自动灌溉系统信息的远程传输,既可以实现农田的自动灌溉,又可实现农田的远程监控。
1 系统硬件设计
1.1 总体结构
自动灌溉系统的总体设计方案如下:①系统主要构成为一个主模块和N个从模块,且主模块和从模块之间通过电力线的方式实现信息的传递;②采用单片机实现对灌溉系统的控制;③系统的远程实时监控通过无线模块实现。其总体结构如图1所示。
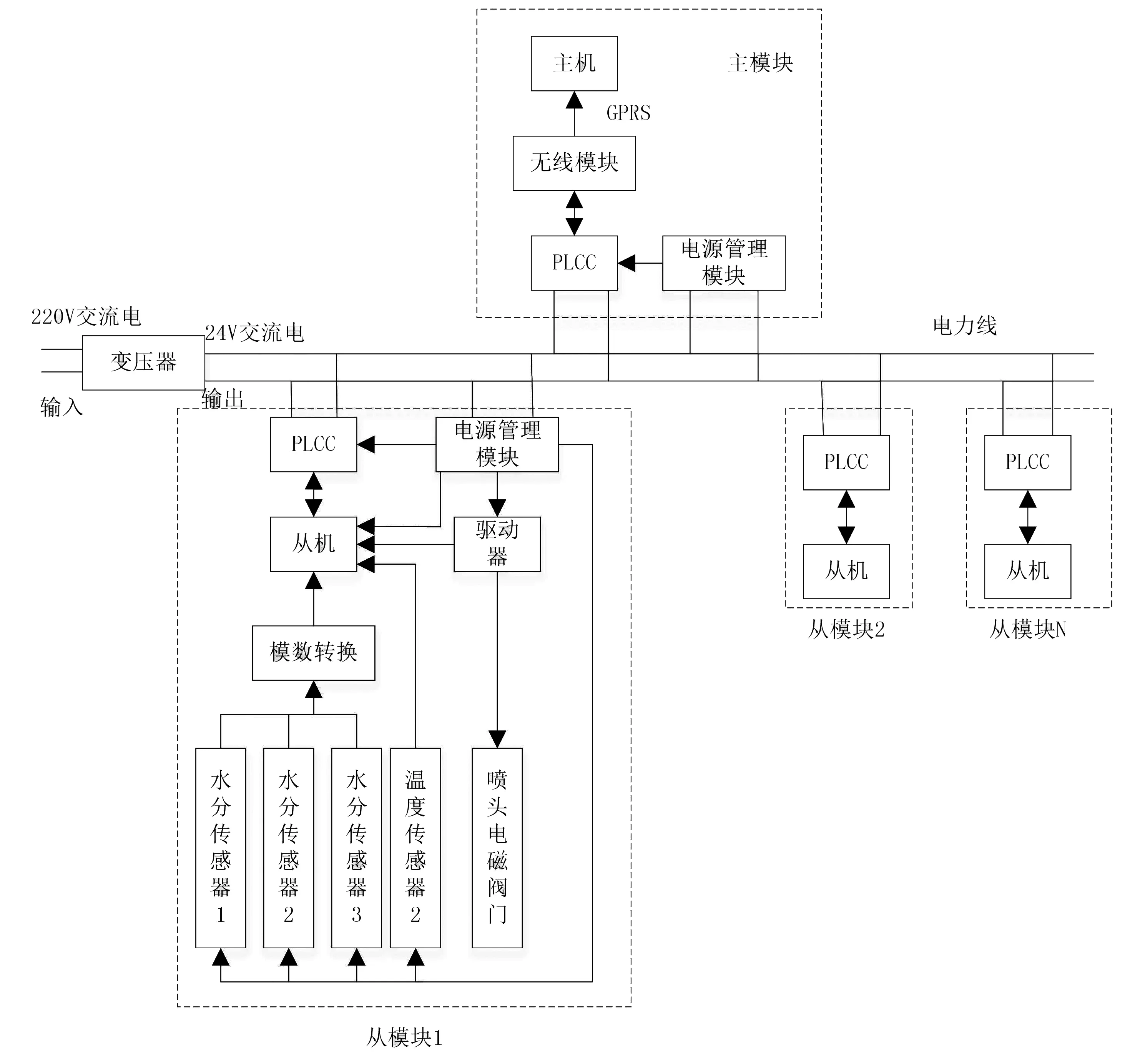
图1 自动灌溉系统的总体结构
1.2 主模块
主模块为系统的总控制站,主要构成为主机、无线模块、电力线、可视化操作界面和电源管理模块,主要用于实现数据的存储、计算、分析和决策,并向从模块发布指令,完成农田的自动灌溉。主机为单片机,用于对获得的数据进行分析、处理和发布指令,以实现对农田的远程监控。主模块的主机和无线模块之间通过互联网实现数据的传输。
该主模块主要具有以下功能:①实时显示各传感器信息,包括农田温湿度值和目标值,以及农田温湿度走势;②由系统软件计算比较环境参数和目标值,确定系统是否需要灌溉或继续灌溉;③将数据自动存储到数据库中,方便工作人员查询历史数据,包括温湿度值、目标值及报警信息等。
系统的拓扑结构采用总线型结构,为保证农田操作的安全性,通过变压器将220V的交流电降压为24V的交流电,由电源管理模块为主模块供电。电力线的载波芯片采用HLPLCS520F型号,通信采用FSK方式,具有抗噪、抗衰减和易于实现的优点。在该芯片周围连接晶振电路、陶瓷滤波器和发射放大电路,其电路如图2所示。其中,晶振电路和陶瓷滤波器用来抗干扰,获得稳定的信号传递,放大电路用于将信号放大并耦合至电力线。

图2 晶振电路、陶瓷滤波器和发射放大器电路图
1.3 从模块
从模块位于农田,属于系统的末梢,主要由电力线、电源管理模块、水分传感器、温度传感器及从机组成。模块数量可以根据土地面积的大小确定,保证每个模块都可以监测到。各从模块和主模块通过24V的交流电力线进行连接。
每个从模块配置一个电源管理模块,用于提供灌溉系统运行所需要的能量。从模块中,从机是单片机,用于收集传感器采集到的农田的温度和水分含量信息,将信息通过电力线传输给主模块。主模块对信息处理后发出命令给从机,由驱动器开启喷头电磁阀门对农田实施灌溉。该阀门还可以手动控制,当温度和水分达到了目标值时,停止灌溉,阀门自动关闭。
温度和水分传感器用于检测土壤的温度和水分,温度传感器采用的是单总线的结构,采集到的数据为数字形式,因此可以直接将数据传递给从机。温度在较大土地范围内的波动较小,因此每个从模块采用一个温度传感器。水分传感器采集到的信号为模拟信号,需要通过模数转换才可以将信息传递给从机,其探头测量范围较小,因此在从模块三角区域布置3个水分传感器进行测量。
2 灰色预测模糊PID算法设计
农田的灌溉用水量不是固定的,会随着气候、地形等因素变化,因此没有固定的数学模型可以描述,而传统的PID控制算法稳定性差,参数不易整合。灌溉系统对于灌溉用水量的精度要求不是特别高,因此采用模糊PID控制算法进行控制。该算法具有不依赖固定数学模型的优点,且可根据以往的工作经验作为基础。
农作物的需水量还需要进行预测,以储备足够的水源进行灌溉。由于目前只能获得农田的温度和水分信息,还存在很多的位置因素,因此可以采用灰色预测方法预测农田需水量。
2.1 模糊PID控制算法
模糊控制系统将水分传感器采集到的模拟值通过模糊控制器进行数模转换。通过比较采集到的水分值和目标水分值,得到偏差e和偏差的变化率ec。将偏差和偏差变化率根据实际情况,通过尺度变换到模糊集体域M,M={-n,-n+1,…,n-1,n}。此时,偏差e和偏差变化率ec分别为
e=
ec=
其中,<>为对值取整。以上的运算结果作为模糊控制器的输入值。模糊控制器的输出也需要进行转换,输出值u为
定义模糊子集为{NB,NM,NS,ZO,PS,PL,PB},论域范围为{-6,6}[6],则该隶属度函数图如图3所示。
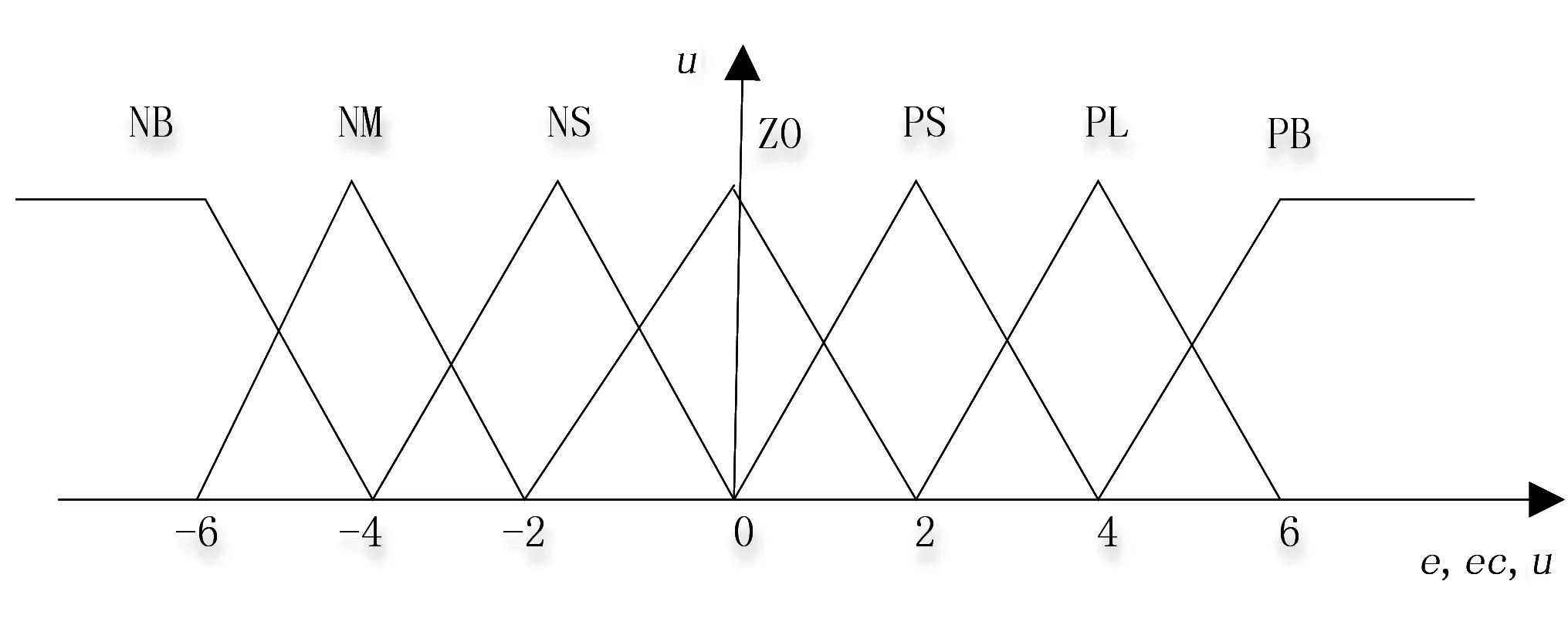
图3 模糊PID控制算法隶属度函数图
2.2 灰色预测算法

其中,i=1,2,…,n;T=1,2,…,n。此时MGM(1,n)方程组为

通过对上式求解,可以得到
此时,灰色预测模型建立完成,通过该模型可以预测农田的水需求量。
灌溉水量变化时,参数灵敏度变化较快,因此对水量的模糊PID控制器进行输出后,再融合灰色预测算法进行控制,以达到对需水量较为准确的控制,其算法结构如图4所示。
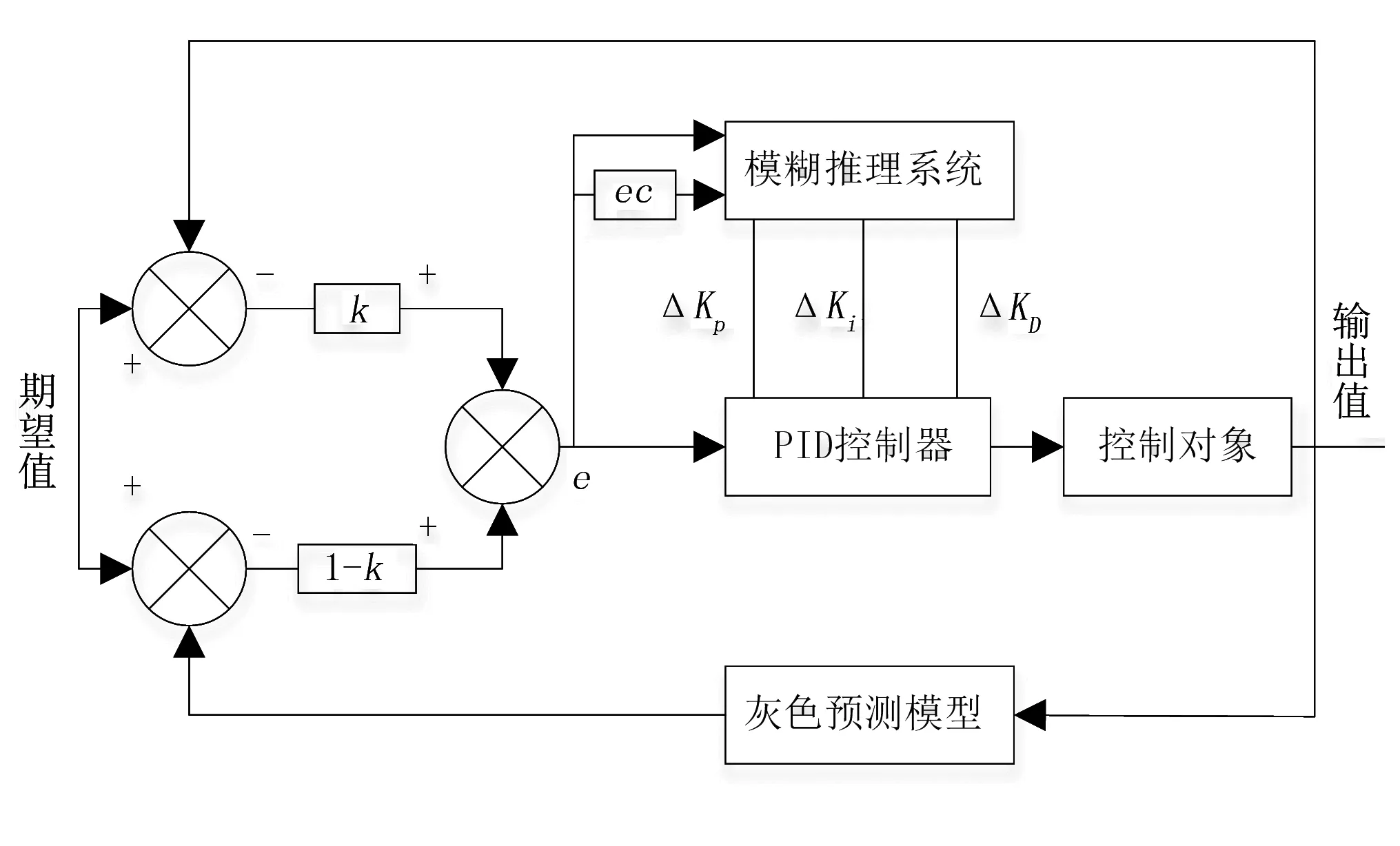
图4 灰色预测模糊PID算法结构
3 试验结果分析
为验证该农田自动灌溉系统的性能,选择一块30m×30m的农田进行测试。农田内安装固定喷灌系统,喷头射程为15m。农田以十字格形式分为4个试验区,每个试验区内以三角方式安装3个水分传感器,中心处安装一个温度传感器,设定电力线的通信速度为1500b/s。
3.1 数据传输可靠性验证
为验证该自动灌溉系统数据传输的可靠性,在水分传感器和温度传感器旁设置水分和温度检测仪检测土壤水分和温度,将结果与主机可视化操作界面的显示结果进行对比,结果如表1所示。

表1 数据传输可靠性试验结果
由表1可知:灌溉系统通过传感器采集并传递至主机可视化从操作界面后,其数据与检测仪手动检测结果很接近,误差很小。其中,水分误差率均小于4.2%,温度误差率均小于1.3%,能够满足灌溉的要求。经过测试,该灌溉系统的通信距离能够达到500m,在测量过程中该系统运行良好。
3.2 系统灌溉试验
为验证灌溉系统控制性能,对该系统进行水流量试验。统计该灌溉系统经测试后和传统灌溉系统的控制性能指标,结果如表2所示。
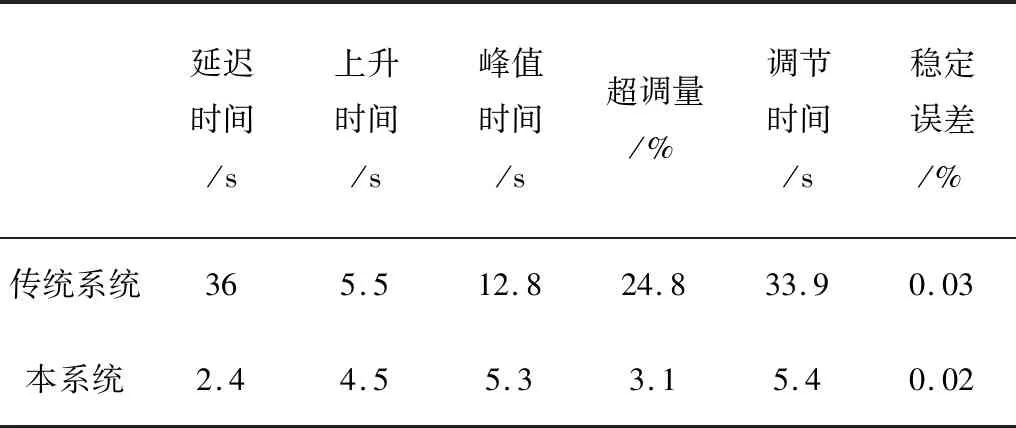
表2 灌溉系统控制性能对比测试结果
本灌溉系统性能稳定,控制性能良好,系统的上升时间和峰值时间均小于传统系统,尤其超调量比传统系统下降了59%,表明该灰色预测模糊PID控制算法能够达到对该灌溉系统良好的控制。
4 结论
1)对农田灌溉系统进行了研究。该系统主要构成为一个主模块和N个从模块,以电力线为通信手段,由单片机实现对灌溉系统的控制,由无线通信模块实现对系统的远程实时监控。
2)该农田灌溉系统通过电力线实现对灌溉系统的通信和远程监控,通过灰色预测模糊PID控制算法实现灌溉系统的需水量的控制。
3)试验结果表明:系统可以实现灌溉系统数据的稳定传输,以及对灌溉系统水流量的稳定控制,且灌溉系统运行稳定,工作性能良好。
猜你喜欢
湖北农机化(2020年4期)2020-07-24 09:07:14
电子制作(2018年23期)2018-12-26 01:01:10
通信电源技术(2018年3期)2018-06-26 08:06:18
制造技术与机床(2017年6期)2018-01-19 02:41:07
电子制作(2017年14期)2017-12-18 07:07:59
电信科学(2016年11期)2016-11-23 05:07:50
电源技术(2015年9期)2015-06-05 09:36:06
电测与仪表(2014年13期)2014-04-04 12:04:08
电测与仪表(2014年20期)2014-04-04 11:58:08
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
