
单臂堆料机堆料臂钢结构有限元分析★
2020-10-16 09:52:20杨佐
机械管理开发 2020年10期
杨 佐
(1.矿山采掘装备及智能制造国家重点实验室, 山西 太原 030024; 2.太原重工股份有限公司技术中心,山西 太原 030024)
引言
在露天矿开采中,废石剥离量大、排土场距离远的矿山,废石运输成本占生产成本比重很大。露天矿开采初期废石的运输多采用汽车运输就近排土的原则, 但随着露天采场的不断延伸降段,露天采场周边可利用的排土场地已被废石堆满,废石需要被运输到距离远、容积大的排土场堆存。根据经验,汽车运输的合理运距不宜超过,超过合理运距后,运输成本将显著增加。因此,废石破碎- 胶带运输- 排土机排土系统作为一种多机械、连续排土工艺在大型露天矿山已得到广泛应用[1],但在某些露天矿山的建设初期,排土机受排土场地的限制不具备使用条件,依然需要大量的汽车来运输废石;当排土机需要移设整个露天矿剥离系统又没有可以替代的排土机排土系统时,也需要大量的汽车来运输废石。采用“废石破碎- 胶带运输- 排土机”与“废石破碎- 胶带运输- 单臂堆料机- 汽车”联合堆排工艺可以降低汽车运输工作量,充分发挥胶带机运输系统节能高效的优越性。
太原重工股份有限公司开发的某型单臂堆料机由行走装置、底架梁、回转平台、堆料臂、润滑系统、电气系统等组成,如图1。其中,堆料臂包含堆料臂钢结构、堆料臂带式输送机组件、受料槽、走台等。堆料臂钢结构采用桁架焊接结构,由多段焊接而成,承载带式输送机组件,因此结构强度和刚度影响到整机的可靠性和稳定性,进行有限元分析具有很大的工程意义。
1 模型概况
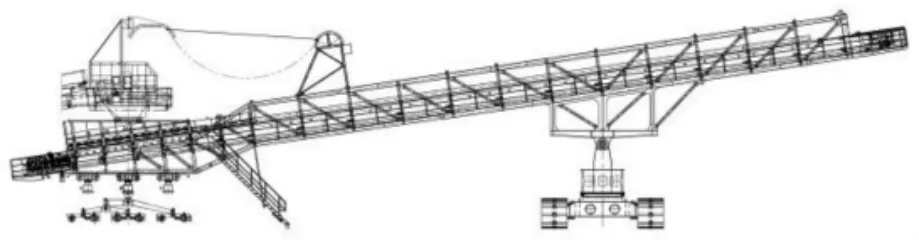
图1 单臂堆料机结构示意图
根据堆料臂钢结构的实际形状,通过UG NX 软件中的NX Nastran 建立有限元模型,NX Nastran 源于有限元软件MSC.Nastran[2]。对堆料臂钢结构进行有限元分析时,结构中的主梁采用二维壳单元划分,其余斜杆采用一维梁单元进行划分。划分后的堆料臂钢结构有限元模型如图2。
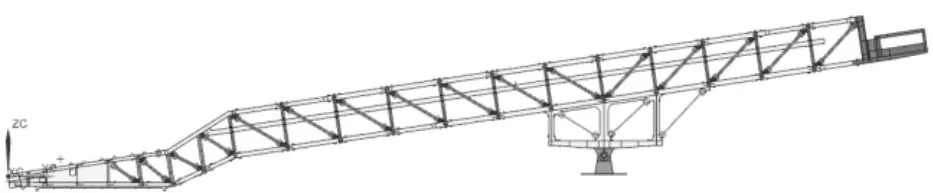
图2 堆料臂钢结构的有限元模型
该模型单元尺寸约为50mm,单元总数为471 332。有限元模型中的坐标系根据后续分析需求所建立。模型所用材料的力学性能如表1 所示。

表1 模型材料力学性能表
如下页图3,根据堆料臂左侧支撑位置不同,分为三种载荷工况:工况1,车轮支撑位于导轨的跨中位置;工况2,车轮支撑位于导轨前极限位置;工况3,车轮支撑位于导轨后极限位置。
2 边界条件
堆料臂钢结构主要承受自重、托辊重量、输送带重量、物料重量等,这些静载荷作为外力施加在钢结构相应的作用位置上。堆料臂钢结构与回转平台采用销轴连接,在回转平台处施加固定约束;在堆料臂钢结构的车轮支撑处施加Z 向简支约束。
3 计算结果及分析
3.1 工况1 计算结果
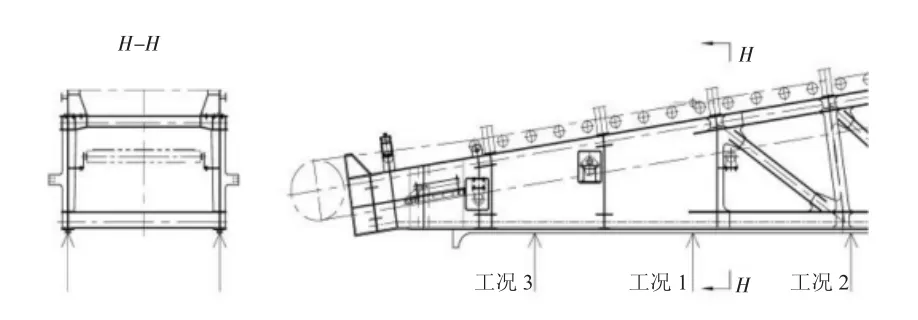
图3 载荷工况示意图
堆料臂钢结构工况1 的Z 向有限元位移云图如图4 所示,工况1 的最大应力及局部有限元应力云图如图5 所示。
3.2 工况2 计算结果
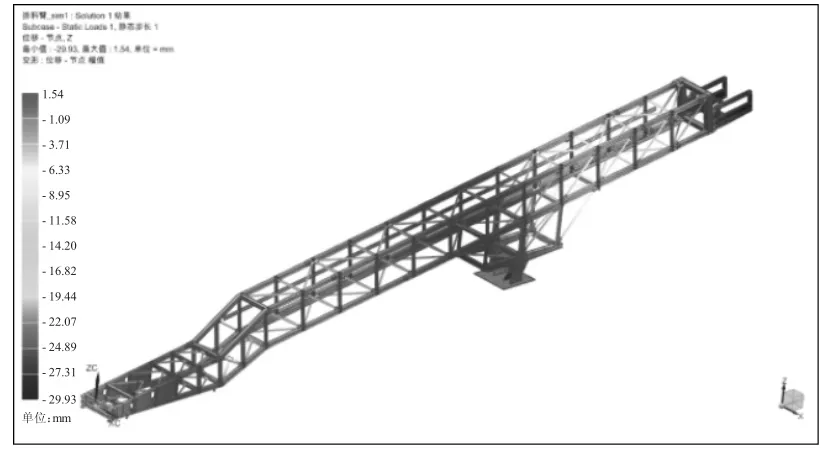
图4 工况1 的Z 向位移云图

图5 工况1 的最大应力及局部应力分布云图
堆料臂钢结构工况2 的Z 向有限元位移云图如图6 所示,工况2 的最大应力及局部有限元应力云图如图7 所示。
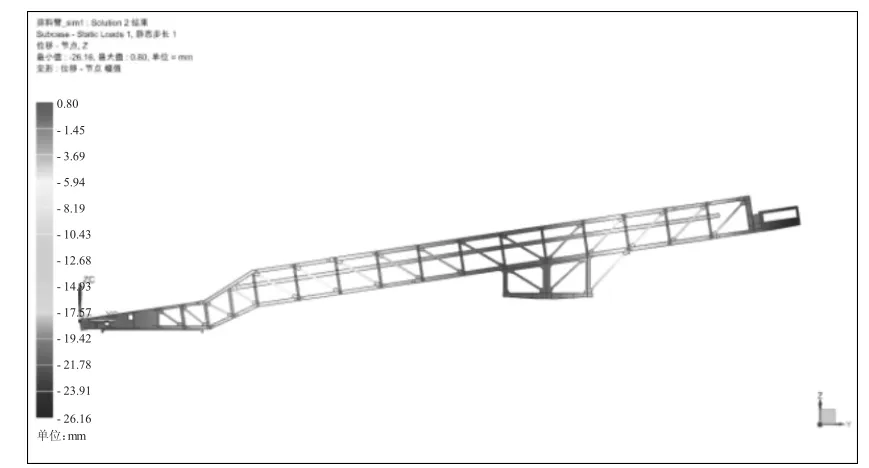
图6 工况2 的Z 向位移云图
3.3 工况3 计算结果
堆料臂钢结构工况3 的Z 向有限元位移云图如图8 所示,工况3 的最大应力及局部有限元应力云图如图9 所示。
3.4 计算结果分析
上述云图中,不同的颜色表示不同的位移或应力,值与图中左侧的标尺上数字相对应。其中,VON-MISES等效应力σcf是按第四强度理论确定的[3]:
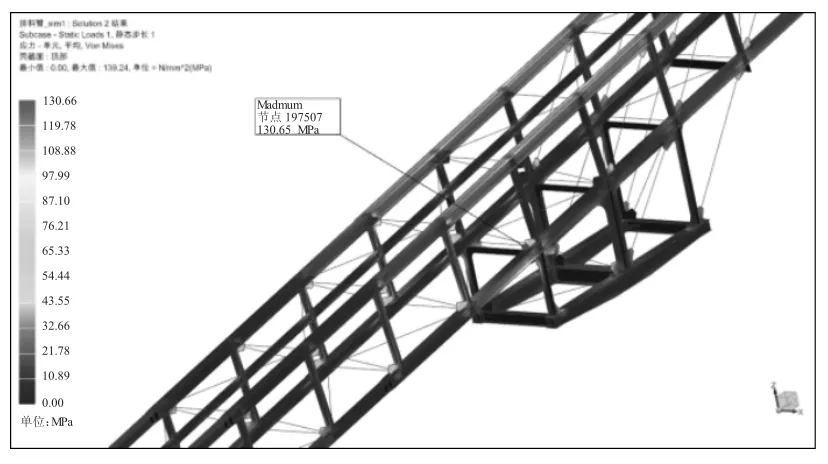
图7 工况2 的最大应力及局部应力分布云图
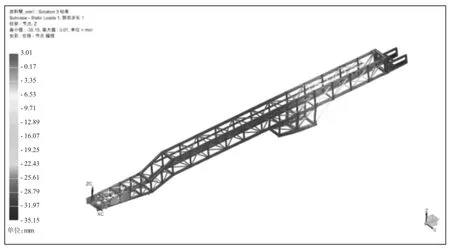
图8 工况3 的Z 向位移云图
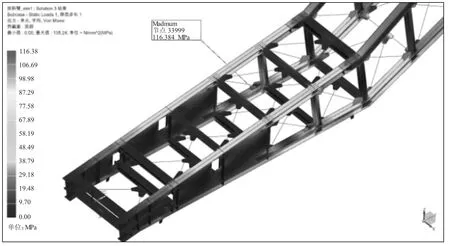
图9 工况3 的最大应力及局部应力分布云图

式中:σ1、σ2、σ3为主应力,且有σ1>σ2>σ3。
三种工况下的堆料臂钢结构有限元静力计算结果汇总如表2。

表2 堆料臂钢结构有限元计算结果
参照GB/T 3811—2008《起重机设计规范》,由额定起升载荷与自重载荷产生的垂直静挠度f 与有效悬臂长度L 的关系为:

式中:L 为铰接中心到堆料臂钢结构最右端的距离;[fz]为有效悬臂端许用垂直静挠度。
依据JB/T 8849—2005《移动式散料连续搬运设备钢结构设计规范》以及工程经验,选择结构的安全系数为1.7,即材料的许用应力[σ]为:

式中:σs为材料的屈服强度。
通过有限元计算结果与上述分析可知:
1)三种工况下的结构静强度均满足要求。
2)堆料臂钢结构悬臂端的结构静刚度符合要求。
3)通过对三种工况的计算结果进行对比,可以看出:在工况2 下,堆料臂钢结构的最大位移相对较小;在工况3 下,堆料臂钢结构的最大应力相对较小;三种工况下,最大位移均位于堆料臂钢结构右端区域,最大应力均位于堆料臂钢结构筋板附近。
4 结语
本文通过建立有限元模型,按三种不同工况施加载荷,进行静强度和静挠度校核。有限元静力分析结果表明,该结构满足不同工况要求,为开发大运量单臂堆料机提供了理论依据。
猜你喜欢
中国建筑金属结构(2022年1期)2022-03-05 15:32:18
采矿技术(2019年5期)2019-11-13 01:57:12
诗潮(2019年8期)2019-08-23 05:39:48
经济技术协作信息(2018年22期)2019-01-19 03:00:20
经济技术协作信息(2018年33期)2018-12-06 08:56:12
意林·少年版(2018年10期)2018-05-30 16:24:42
诗潮(2017年4期)2017-12-05 10:16:18
港口装卸(2016年4期)2016-09-08 04:42:24
诗潮(2015年3期)2015-03-20 14:40:24
现代矿业(2015年7期)2015-03-09 06:46:17
