航天器供配电系统数字伴飞技术应用研究
2020-10-16 10:59:32刘治钢夏宁杜青
航天器工程 2020年5期
刘治钢 夏宁 杜青
(北京空间飞行器总体设计部,北京 100094)
航天器在轨的运行状态主要通过遥控指令和遥测参数与地面进行交互。以嫦娥五号(Chang’e-5)、“国际空间站”(ISS)为代表的复杂航天器,具有在轨工作模式多、航天器组合状态多、机构运动复杂等特点,加之受到测控弧段、测控资源的限制,难以通过遥测参数实时连续地了解整个航天器的在轨运行状态。针对上述问题,需要有一套地面模拟(或称为数字孪生)系统能够对航天器的运行状态进行高精度实时连续仿真或模拟。另外,在变轨、调姿、载荷开机等重要指令执行前,也需要通过地面模拟系统对指令执行情况和结果进行模拟仿真和预示。
2003年,文献[1]提出了数字孪生早期的一个定义,即物理产品的虚拟/数字等价物,也可理解为凡是用于模拟真实环境下系统状态的样机或模型,都可以被称为“孪生体”[2]。2011年,文献[3]重新丰富了数字孪生的概念,它包含3个部分:物理空间的实体产品;虚拟空间的虚拟产品;虚拟产品和实体产品之间的数据和信息通道。数字孪生应具有“全生命周期”、“实时/准实时”和“双向”等特征。2011年,美国空军研究实验室和NASA合作提出了构建未来飞行器的数字孪生体,并定义数字孪生为一种面向飞行器或系统的高度集成的物理场、多尺度、多概率的仿真模型,能够利用物理模型、传感器数据和历史数据等反映与该模型对应的实体的功能、实时状态及演变趋势等。在故障预测与健康管理方面,NASA将物理系统与其等效的虚拟系统相结合,研究了基于数字孪生的复杂系统故障预测与消除方法[4]。
数字孪生概念在航天领域的引入最早可追溯到NASA的阿波罗工程,在该项目中,NASA制造了两台完全相同的飞行器,留在地面的一台即称为“孪生体”[5]。在任务准备阶段,“孪生体”可用于航天员训练;在飞行任务期间,“孪生体”被“镜像”为在轨状态,用于任务方案的高精度仿真[6]。在空间站任务中,由于空间站电源系统规模太大,无法通过完整的系统实物联试方法来验证电源系统的能力,因此,NASA的刘易斯研究中心能源和推进实验室开发了航天器电能评估分析(Space System Power Analysis for Capability Evaluation,SPACE)软件系统,用于电源系统的设计与运行评估[7]。国内也开展了地面模拟器对航天器地面仿真、测试或在轨航天器飞控模拟相关实践,通常是围绕航天器的某种特性或行为开展。如文献[8]针对航天器交会对接控制开展了半物理仿真研究;文献[9]设计了一种用于航天器飞控演练的数管模拟器;文献[10]提出一种推进剂补加飞控模拟器;文献[11]针对硬X射线调制望远镜(HXMT)卫星控制系统进行的数字伴飞研究,初步尝试解决该卫星飞控策略、动作执行和状态评估问题;文献[12]针对模块化航天器采用Simulink软件建立了电源系统模型开展仿真研究。
本文以航天器供配电系统为研究对象,采用“数字孪生”技术思想开展航天器供配电数字伴飞技术研究,目的是建立航天器供配电系统数字化模型,将数字模型与实物航天器关联,通过遥控遥测数据、飞行程序等外部资源接口,实现地面仿真系统与在轨航天器的同步运行,实现航天器供配电状态实时监测和状态预示,同时通过仿真结果与遥测数据的对比和分析,对在轨航天器供配电系统任务进行干预。
1 航天器供配电数字伴飞系统设计
1.1 航天器数字伴飞的概念与功能
航天器数字伴飞是借助航天器的“数字孪生体”模拟航天器实体在空间环境中的行为,通过虚实交互技术,利用在虚拟环境中运行的孪生体开展决策迭代优化,解决航天器实体策略制定、动作执行和状态评估等问题。若要对整个航天器的在轨行为进行准确模拟,就需建立多学科集成化的模拟环境。
通过航天器在轨状态的数字伴飞,可实现以下功能。
1)航天器在轨运行状态实时评估
对实时遥测数据、实时仿真数据、历史遥测数据、地面测试数据等信息进行综合处理,既可以实现对超范围参数进行实时提醒和报警,也可以对航天器在轨性能衰降情况进行评估。如对蓄电池组电压、蓄电池组放电深度、太阳电池阵输出功率、母线电压等重要参数遥测值与仿真值的实时比对,包括数值比对、曲线比对等方式,对超范围的参数进行提醒和报警。
2)辅助制定航天器在轨运行策略
将航天器物理实体运行的约束条件、动作时序、参与设备等信息作用于航天器数字孪生体,根据仿真结果预示执行策略后的运行状态,从而可以制定并优化航天器在轨运行策略。这样,可以实现数字孪生体与物理实体的双向作用,为航天器物理实体在轨运行策略制定提供有效的信息支持。
3)故障状态模拟与故障预案快速推演
通过修改数字孪生体的参数或运行时序,数字伴飞系统可用于模拟故障模式下故障的演进情况,同时对制定的故障预案进行快速仿真模拟验证,辅助分析故障预案的可行性和有效性。如调整太阳电池阵对日定向角度、限定充电电流等进行仿真,快速推演其对整星能量平衡的影响。
1.2 航天器数字伴飞的基础
要实现航天器在轨飞行状态的精确模拟和数字伴飞,可信的数字化模型和基于飞行事件/程序驱动的仿真策略二者缺一不可。
1)可信的数字化模型
可信的数字化模型是开展数字伴飞的前提。通常,构建航天器系统、设备或部组件模型的方法包括:数学建模、物理机理建模和试验数据建模等方式,在实际应用中根据仿真颗粒度和对物理实体描述方式进行选择。对于部分无法或难以实现正向建模的参数,如自主控温策略引起的加热功率变化等,可以通过控温状态进行逆向建模。为保证模型的完备性,还需要明确模型的置信度和置信区间。完成建模后需要通过电性能测试、热试验等地面测试或试验中对模型进行修正,确保数字化模型输出与实际输出一致。另外,由于航天器在轨运行状态和地面测试状态存在差异,还需要结合同类型卫星历史在轨数据或自身飞行的历史数据对模型进一步进行修正。
2)飞行事件/程序驱动的仿真策略
数字孪生体与航天器实体运行保持时钟同步是开展数字伴飞的重要保证。因此,系统必须采用高效的求解算法,以确保在飞行事件或飞行程序驱动下实时状态同步更新。在轨不可见弧段,孪生体通过预置飞行程序的方式实现与航天器实体同步运行;在进入可见弧段后,能够快速对仿真状态和遥测状态进行评估,并能够对仿真状态/参数进行修正,确保孪生体的状态与航天器实体状态同步。
1.3 航天器供配电数字伴飞系统设计
航天器供配电数字伴飞系统组成及功能逻辑如图1所示。以航天器供配电系统级仿真模型为核心,依据地面试验数据对模型进行校核;由飞行程序事件驱动供配电系统模型建立数字伴飞状态,利用准确的数学模型以及高精度的求解器,对全任务周期内的供配电系统工作状态进行伴飞仿真分析;建立星上遥测数据输入通道,达到地面数字模型与实际航天器同步运行效果,对遥测数据和数字伴飞系统实时仿真结果进行比对,实现在线数据判读;同时结合飞行任务需要,通过曲线、图表、STK动画等形式对数字伴飞的结果进行展示。数字伴飞系统还可以通过输入下一阶段的飞行程序,对航天器供配电系统的未来状态进行仿真预示;另外,还可以对预置故障模式(如一路太阳电池阵分阵开路、一节蓄电池单体失效等)下进行仿真,辅助进行故障分析、排查和故障预案制定等。

图1 航天器数字伴飞系统组成与功能逻辑Fig.1 Composition and function logic diagram of spacecraft digital companion system
2 航天器数字伴飞关键技术
2.1 数据驱动的模型动态修正方法
现有模型验证一般都是依赖调节参数,得到仿真模型的输出响应与真实物理系统的试验数据对比,通过最小二乘或优化方法获得模型的最佳参数。然而,如果一个模型结构存在缺陷,那么通过调整模型参数无法使得其输出响应与真实响应趋向一致。例如,供配电系统中锂离子蓄电池组,通过拟合常温充放电曲线得到蓄电池组模型,但如果实际工作温度、充放电电流大范围变化时固定的充放电曲线就会出现较大的误差,需要通过不同温度、不同倍率充放电的曲线族的方式进行建模,通过调整模型结构来获得较好的仿真结果。针对常规依赖调节参数开展模型验证方法的不足,采用数据驱动的模型动态修正方法,通过动态响应曲线逼真度度量方法面向模型结构(粗调)和参数(细调)的同步验证,在对地面测试海量数据分析的基础上,使之与在轨飞行真实系统输出趋于一致,提高模型置信度。实时数据驱动的供配电系统模型动态修正技术逻辑如图2所示。

图2 实时数据驱动的供配电系统模型动态修正技术Fig.2 Dynamic correction technology of real-time data-driven electrical system model
(1)粗调阶段:在实际模型结构搭建过程中,模型结构均是由各功能或结构单元组成,对模型结构进行调整可以转化为不同类子模型之间的组合优化问题。组合优化的目标是寻找最优的子模型组合方案,使研究对象的模型整体的仿真结果与实际物理系统的真实输出间的差值最小。在时间序列上对仿真结果和实际物理系统的真实输出进行离散,则最小化两者之间的差值A即为优化目标,如式(1)
(1)
式中:Si代表仿真结果,Ri代表实际物理系统的真实输出结果,N代表时间序列的离散数。
(2)细调阶段:当粗调阶段完成后,细调阶段则针对模型参数进行调整优化。优化的目标仍然是仿真结果与实际物理系统输出值的最小化差值。大型复杂系统模型通常会同时包含数字量和模拟量两种类型的参数变量,针对其构造的优化问题是一个混合离散优化问题,如式(2)。
(2)
式中:x是数字量变量,y是模拟量变量。
2.2 航天器系统飞行状态仿真估计与预示技术
基于航天器飞行任务程序,采用在线与离线仿真相结合的技术手段,通过在轨遥测数据实时解析与供配电系统相关的飞行事件,实现航天器供配电系统“数字伴飞”:一方面进行航天器供配电系统在轨飞行健康状态评估;另一方面综合在轨遥测、在线仿真、离线仿真、历史数据的结果对比分析,对后续飞行状态进行预示。
通过在轨遥测数据实时解析飞行器姿态、轨道光照条件、飞行事件等,将外部条件的变化实时注入供配电系统模型,并基于遥测在线判读知识库,对在线遥测数据进行阈值或者偏差分析判读,识别当前供配电系统的功能和性能状态情况,评估航天器在轨飞行能源健康状态。同时能够通过提前置入下一阶段的飞行程序,提前预算并评估系统的未来的运行状态,辅助对航天器运行管理策略的决策。根据对仿真结果数据的处理分析,及时调整优化航天器的飞行程序,使得电气系统处于更好的良性工作状态。
在实时遥测数据驱动的电气系统模型仿真求解过程中,获取求解器特定时刻求解状态并另行开辟计算分支,以最近时段的空间姿态、飞行状态等在轨遥测数据通过滤波算法(限幅滤波法、消抖滤波法、中位值滤波法等)滤波后作为求解计算初值,然后导入下一阶段的飞行任务程序,结合在轨遥测值、当前仿真值、仿真预示值的数值曲线实时对比分析,对后续的飞行状态进行预示。基于模型的供配电系统状态监测与预示技术逻辑图如图3所示。
建立系统的工作模型为
xk+1=f(xk,u,w,Δ)
(3)
式中:xk为k时刻模型计算值,xk+1为k+1时刻模型计算值,u为按飞行程序指令输入,w为外部干扰信号,Δ为模型不确定度。
考虑模型不确定度Δ,利用航天器的在轨遥测数据,使用高斯过程对模型的不确定度进行建模为
Δ(·)~GP(m(·),j(·,·))
(4)
式中:GP()表示高斯过程模型,m(·)表示高斯过程的均值函数,j(·,·)表示高斯过程的协方差函数。
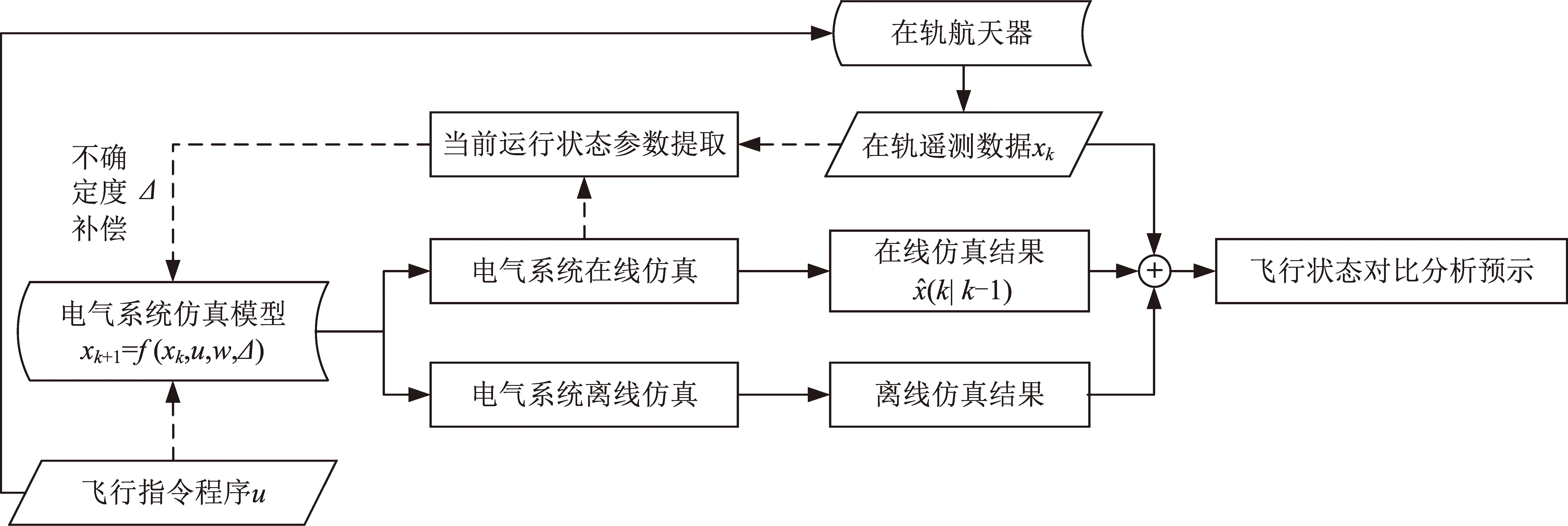
图3 基于模型的供配电系统状态监测与预示技术Fig.3 Model-based electrical system state monitor and prediction technology
通过学习历史遥测数据的特点,训练高斯过程模型对具有周期特性的不确定度进行估计与预测,实时更新与补偿仿真系统的动态模型,从而使仿真系统接近航天器电气系统真实的工作情况。通过高斯过程补偿不确定度Δ可以提高系统模型精度,能够进一步提高卡尔曼滤波器性能。利用基于高斯过程学习的改进扩展卡尔曼滤波算法为

(5)

通过在轨遥测数据对仿真估计值进行实时估计和更新,从而能够获得参数的预测值。再通过对历史数据的学习来补偿模型不确定度,从而提高仿真模型的估计精度,进一步基于贝叶斯理论可以得到未来系统状态运行的预测区间,取未来状态预测的均值作为预测结果,进而可以对航天器供配电系统的在轨健康状况进行预示。
3 航天器供配电系统数字伴飞应用实践
依据Chang’e-5供配电系统电路拓扑,采用Modelica多学科建模语言建立了在轨数字伴飞系统的数学模型,如图4所示。航天器供配电数字伴飞系统在Chang’e-5的整器热试验和无线联试中进行了应用。
在地面测试期间,按照2.1节模型修正方法,针对不同的模型参数,结合设计数据、测试数据和热试验数据对模型结构或参数进行修正。以负载功率参数为例,设计阶段采用设计值进行建模;在产品研制后采用验收数据对设计数据进行更新;在热试验期间,通过对设备加断电时序进行分析,获得用电负载在高低温条件下的功耗,建立温度与功耗之间的关系,修正原有模型中常温下用电负载功耗数据,通过不断修正和调整,得到更加精确的负载模型。不同阶段测试数据对负载模型修正方法如表1所示。
整器热试验过程,对Chang’e-5着陆器-上升器组合体在环月段及动力下降段低温循环工况进行了仿真分析,并根据飞行程序对动力下降过程的太阳电池阵输出功率、蓄电池组电压、蓄电池组放电深度等供配电系统重要参数进行了实时仿真,参数仿真结果与实际测试结果间的平均误差小于2%。
在与飞行控制中心无线联试期间,按照Chang’e-5飞行程序对各飞行阶段供配电数字模型进行了全面验证。一方面通过仿真值与遥测值比对,对超出阈值范围的参数进行提示,如图5(a)所示。另一方面,通过对关键参数的地面历史测试数据、实时仿真数据和实时遥测数据进行比对。如图5(b)所示,以蓄电池组电压为例,绿色曲线代表在热试验期间相同工况的测试数据曲线,红色曲线代表实时遥测数值,蓝色曲线表示实时仿真数据曲线,黄色曲线代表基于实时遥测数据和后续飞行程序的预示曲线,其中测试数据仅作为参考。从图5中可以看出,蓄电池组电压仿真值与实时遥测数据具有较好的一致性,稳态工况下最大误差小于5%,平均误差小于2%,验证了伴飞系统及模型的正确性、稳定性,为后续在轨应用奠定了坚实基础。
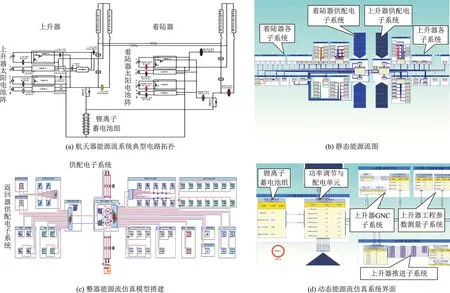
注:GNC为制导、导航与控制。图4 嫦娥五号数字伴飞系统示意图Fig.4 Digital companion system for Chang’e-5 probe

表1 不同阶段测试数据对负载模型修正方法示例Table 1 Model adjustment method of electrical load using test data during different period


图5 数字伴飞仿真数据与遥测数据实时判读比对Fig.5 Real-time comparison of digital companion simulation data and telemetry data
4 结束语
本文提出了航天器供配电数字伴飞系统的概念、内涵与功能要点,明确了可行的数字化模型和飞行事件/程序驱动的仿真策略是开展“数字伴飞”的基础,实现“数字伴飞”的2项关键技术。通过建立Chang’e-5供配电数学模型,并在整器热试验和无线联试中进行了应用验证,对开展航天器供配电系统“数字伴飞”做了有益的尝试,具有如下应用价值。
(1)采用“数字孪生”思想,将航天器供配电系统数字模型与物理实物相关联,可有效辅助供配电系统地面测试及在轨飞控过程的数据判读,有助于全面掌握各飞行阶段航天器供配电系统状态。
(2)可信的模型是开展“数字伴飞”的基础,通过地面测试阶段的海量数据,对航天器供配电系统仿真模型进行修正;基于可信的模型,可用于辅助地面测试方案分析与验证、飞行程序演练、在轨飞行过程参数判读、在轨故障预案仿真验证等,为基于模型的供配电数字化设计与验证提供参考。
随着航天任务复杂程度的日趋提升,数字伴飞系统将在航天器飞控过程中将发挥越来越重要的作用。后续可进一步深入开展数学模型可信度评估、供配电系统在轨健康度评估与预测等方面研究,对航天器供配电数字伴飞系统的进一步更新和完善,为航天供配电系统设计与在轨管理任务的实施提供更有力的支撑和保障。
猜你喜欢
国际太空(2022年7期)2022-08-16 09:52:50
中国交通信息化(2019年8期)2019-11-04 00:58:22
国际太空(2019年9期)2019-10-23 01:55:34
电子制作(2019年11期)2019-07-04 00:34:40
国际太空(2018年12期)2019-01-28 12:53:20
国际太空(2018年9期)2018-10-18 08:51:32
电子测试(2018年13期)2018-09-26 03:30:00
电子制作(2017年8期)2017-06-05 09:36:15
现代工业经济和信息化(2016年6期)2016-05-17 05:36:13
河南科技(2014年16期)2014-02-27 14:13:30