一种无人机网络位置感知路由协议的安全性分析
2020-10-14 01:03张继永
网络安全技术与应用 2020年10期
◆张继永
一种无人机网络位置感知路由协议的安全性分析
◆张继永
(91977部队 北京 100841)
在分析无人机网络位置感知路由协议AeroRP基础上,探究了其主动监听、呼叫信标、地面站更新以及确定下一跳节点等协议执行阶段可能存在的安全隐患,包括节点不合作、被敌方篡改网络层数据包MAC地址、伪造信标或者截获地面站发送的无人机节点位置信息等攻击行为。本文将基于密码体制和基于信任评估机制的安全解决方法结合起来,应用于位置感知路由协议的设计,有效增强了其安全性,进而可以提升联合作战环境下我战术无人机网络节点间通信传输的安全性和时效性。
无人机网络;位置感知;路由协议;安全性
相较于传统的诸如AODV、DSDV和OLSR等移动ad hoc网络路由协议,位置感知路由协议更适应于高动态、快速多变的大尺度战术无人机网络,已成为无人机网络由算法研究的热点[1]。但敌方可以利用路由协议设计存在的各种安全漏洞,使用格式正确的恶意路由来合法更新网络中的邻居列表,可以轻易地启动各种攻击行为;敌方可以使用路由环路攻击[2],在数据转发路径中创建错误环路,使数据包无法到达目的地,达到瘫痪网络的目的。因此,保护和增强路由协议的安全性是无人机网络研究的一个重点问题。
1 位置感知路由协议
针对其支持飞行试验的遥测系统无法满足未来发展的需求,美国试验中心和项目评估投资机构(CTEIP)于2004年10月启动了增强遥测综合网(Integrated Network Enhanced Telemetry)项目[3]。iNET对全部飞行数据实时处理,可适应未来信息化试验环境下的空地一体化、多机协同试飞需求,并且具有远程、宽带组网能力。基于这个项目,美国堪萨斯大学的James P G S、Abdul J 等人于2011年对协议栈体系进行了研究,提出了一种领域特定架构和协议套件,包括TCP友好的传输协议AeroTP,IP兼容的网络层协议AeroNP以及地理位置感知路由协议AeroRP[4]。通过基于轨迹信息来预测链路何时可用,以及主动监听附近节点,AreoRP可向目的地随机地发送数据,并可更有效利用可用的网络带宽。
1.1 网络层协议数据包格式
无人机网络层协议是专门为高动态机载环境设计的,AeroNP数据包格式如图1所示。
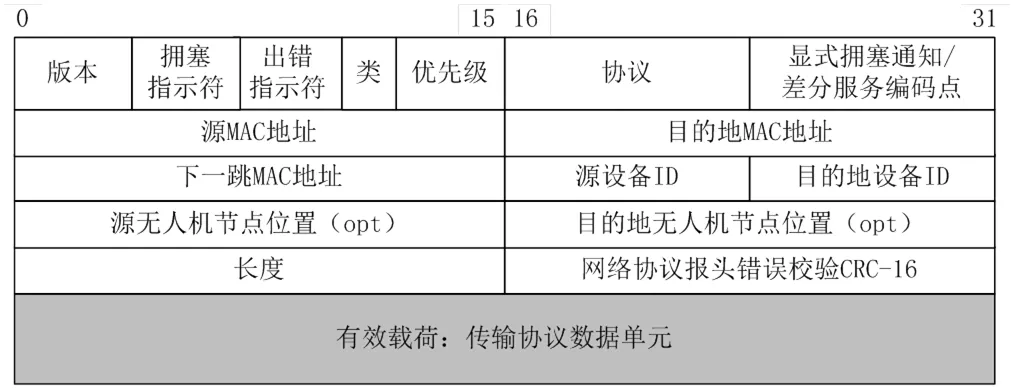
图1 AeroNP数据包格式
该数据包格式对位置感知路由算法提供显示跨层支持,即包括了“源”和“目的地无人机节点位置”。它们是可选字段,低速飞行时可以省略,但在无人机高速运动时必须包括进来;它们是指节点的卫星定位坐标和速度矢量,路由感知算法可以充分利用无人机网络节点的位置和轨迹等独特信息来计算出更优的路径。
1.2 AeroRP路由协议
该协议是一种智能多跳路由协议,专门为高动态物理拓扑的无人机网络设计,基本操作包括邻居发现和数据转发两个阶段,如图2所示。
该无人机网络路由协议的首要目的就是确定其邻居节点。为了找到正确的邻居节点,采用了以下3种不同的机制,目的是减少协议开销并提高战术恶劣环境适应性。
①主动监听,是节点定位和识别其邻居的主要机制。AeroRP将其监听的每一个数据包的MAC地址(如图1所示)发送至邻居列表中。协议假定无人机节点间是合作节点且传输范围对称,从而如果一个节点可以监听到另一个节点的发送,它也可以和该节点进行通信。如果在与预期接触时长相关的预先设定时间间隔内没有监听到节点的发送,则从邻居列表中删除该过时节点数据。
②HELLO信标,空闲节点使用Hello信标来通告他们的存在。当邻居节点监听到一个信标,他们便更新邻居列表。Hello信标的发送频率和计算的最小接触持续时间成反比。例如,如果持续时间是10秒,Hello信标是每秒传输一次,但是如果持续时间是100秒,则Hello信标需要每10秒发送一次。
③地面站更新,在某些作战场景中可替代主动监听,此时,地面站具有部分或完整的飞行计划,从而可以向所有节点发送定期更新数据,其中含有由飞行计划预测的位置和速度数据。
在邻居发现之后,AeroRP的第二阶段是确定某次传输的下一跳。当一个节点需要发送数据时,假设已经有邻居节点被发现了,数据包就会转发至通过当前坐标和速度计算出的离目的地最近的节点。
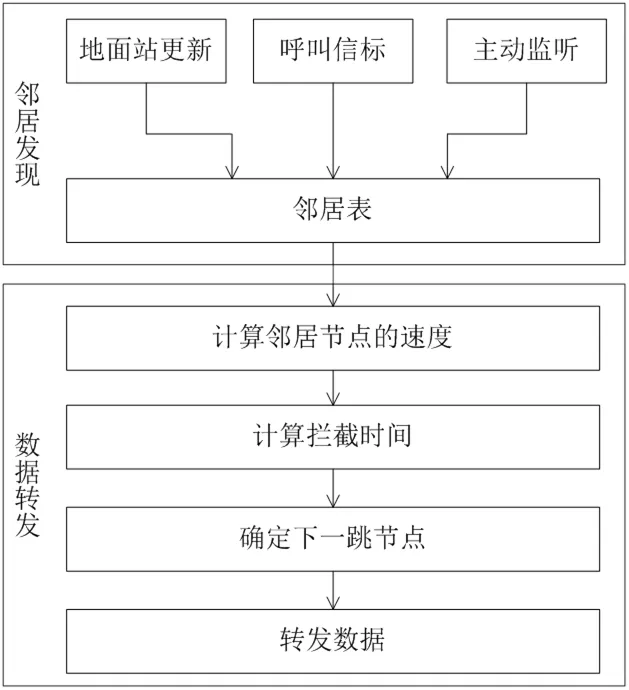
图2 AeroRP算法流程示意图
2 安全风险分析
2.1 无人机网络安全风险
与传统无线Ad hoc网络相比,战术无人机网络由于其通信信道完全开放且处于敌我双方激烈对抗的恶劣战场环境中,因此极易遭受攻击,并且网络拓扑结构高动态变化,使得设计战术无人机网络路由协议异常复杂,安全性问题也成为一个新的挑战。
无人机节点可在任何方向上进行移动,因此,对于高动态的网络拓扑结构,静态配置的路由协议无法适用的,路由可以在源节点和目的节点之间建立,而无人机网络结构中各节点之间的数据转发多是由传统Ad hoc路由算法实施,所以,敌方都可以恶意地使用格式正确的数据包来合法更新网络节点使用的邻居列表。如果敌方向无人机网络中发布虚假的路由信息,则合法节点在不知不觉中就会转发虚假信息[5]。下面分析协议运行各阶段可能存在的安全隐患。
2.2 AeroRP安全风险
主动监听阶段,AeroRP路由协议假定无人机网络各节点间是合作节点,存在安全风险。由于无人机网络能否正常执行作战任务极大地依赖节点之间的相互合作,若存在不合作的节点,即仅接受服务而不提供服务,则会导致网络不可用。
HELLO信标阶段,接收到Hello信标的节点会认为发送方将会是邻居节点,存在风险,这种假设有可能是错误的。敌方信息系统可以将单个Hello信标发送到我方无人机网络中的每个节点,并使每个节点相信它是自己的邻居。此后,无人机节点将会试图通过这条路由与目的地进行通信,从而造成数据包丢失,导致整个网络陷入混乱的状态。
地面站更新阶段,对于军用战术级无人机网络,节点位置和轨迹属于机密敏感信息,地面站向无人机节点发送的位置更新信息会被敌方尝试窃听、注入数据包、破坏或进行中间人攻击和中继攻击。
确定下一跳阶段,在AeroRP协议中,每个节点都利用数据转发算法尽量沿最短路径传输数据。当一个无人机网络节点需要向另一节点转发数据的时候,它会借助其邻居节点去寻找距目的节点最近的那个节点作为中继来转发数据。当使用欧几里得距离公式来计算最近的节点时,由于战术无人机网络节点局部不稳定的固有特性,有时会遇到“路由空洞”[6],即找不到更近的邻居节点,进而无法继续转发数据。
3 安全策略
为高动态无人机网络专门设计的位置感知路由协议容易受到战术恶劣环境下虚假地理位置信息的攻击,从而影响作战使用性能。针对该协议面临的各种攻击与威胁,目前的设计主要基于两种不同的安全策略,一种基于密码体制的安全路由方法,另一种基于信任评估的可信路由方法[7],我们将两种机制有机结合起来,应用于该协议的安全性设计,可有效应对各类安全风险,各种机制方法对应关系如表1所示。

表1 AeroRP协议安全风险与应对策略表
基于密码体制的方法主要通过加密、认证和数字签名等技术手段,提供机密性、完整性和不可否认性等服务;而基于信任评估的方法主要通过信任模型对节点的可信度进行考察,在路由协议执行过程中,选择可信度高的节点完成数据转发,从而防止恶意节点的出现。
文献[8]提出了在无人机节点配备第二个收发机,用于与地面站进行点对点加密通信,事实上可以利用无人机已有的加密遥测遥控链路即可有效防止地面站更新受到敌方攻击问题,我方的地面无人机控制站可以作为可信的第三方,利用无人机测控链路具有的长距离和宽下行带宽等特性,进行节点身份验证和密钥传输;协议中使用的每个数据包都经过身份验证和加密,从而可以有效防止伪造的地理位置信息;对于确定下一跳问题,文献[9]提出了利用节点的位置、轨迹以及信任等级来综合分析,并依此确定最优下一跳的解决方案。
无人机网络的邻居发现依赖于所有节点的参与、协作和信任,敌方节点可以简单地假冒或者修改邻居节点,通过拒绝合作来破坏邻居发现机制,通用安全手段如入侵检测等机制对这种假冒行为束手无策。在战术无人机网络中,节点离开与加入更为频繁迅速,需要频繁对网络认证信息进行更新[10],为此,基于身份的密码学方案,对于解决无人机网络安全问题是最优的。
通过分析比较可知,基于密码体制的安全路由方案能较好地解决伪造、篡改等各种敌方恶意攻击;而基于信任评估机制的安全路由方案可以较好地解决节点不合作问题,而将两者结合起来,则可以设计出一个安全的基于位置感知的无人机网络路由协议。
4 结束语
为了保护无人机网络免受敌方攻击,我们应该对战术无人机网络通信堆栈所有层均设计针对拒绝服务攻击的保护机制、保护通信信道的机密性和完整性、通信信道仅保持于被授权的节点之间,最重要的是如果使用了某种路由协议,一定要确保该协议是安全的。
其次,在使用地理位置路由协议的情况下,定位系统在无人机网络设置中非常重要。敌方无时无刻不在尝试篡改无人机使用的位置信息系统,从而获取我方所侦察探测感知数据的位置或控制无人机的飞行路径。基于GPS的位置信息系统容易使用但可能被欺骗,因此,在战术无人机网络系统中,应该优先使用我国自主研发的北斗卫星导航定位系统,从而保证我军战术无人机网络地理位置系统安全问题。
[1]Frew E W,Brown T X.Networking issues for small unmanned aircraft systems[J].Journal of Intelligent & RoboticSystems,2009,54(1/3):21-37.
[2]Andreas Larsson.Report on the state of the art of security in sensor networks,2011.
[3]郑博,张衡阳,黄国策,任清华.航空自组网的现状与发展[J].电信科学,2011.5(38-487).
[4]JUSTIN P. ROHRER, ABDUL JABBAR, EGEMEN K. CETINKAYA,ERIK PERRINS,JAMES P. G. STERBENZ. Highly-Dynamic Cross-Layered Aeronautical Network Architecture. IEEE Transactions on Aerospace and Electronic Systems,47(4):2742-2765,October 2011.
[5]何道敬,杜晓,乔银荣,等.无人机信息安全研究综述[J].计算机学报,2019(5):1076-1095.
[6]王利,王普,闫峥.无人机通信网络安全综述[J].网络空间安全.2019(10):13-19.
[7]中国密码学会组编,任伟编著.无线网络安全[M].北京:电子工业出版社,2011.
[8]Amir Swidan;Sherif Khattab;Yasmine Abouelseoud; Hassan Elkamchouchi.A secure geographical routing protocol for highly-dynamic aeronautical networks[J].MILCOM 2015 - 2015 IEEE Military Communications Conference,2015.
[9]孙凌,罗长远.基于地理信息的航空自组网安全路由算法[J].计算机工程与应用,2019,55(12):77-82.
[10]Deng H,Li W,Agrawal D P. Routing security in wireless ad hoc networks[J]. IEEE Communications Magazine, 2002,40(10):70-75.
猜你喜欢
少林与太极(2022年6期)2022-09-14
趣味(数学)(2022年3期)2022-06-02
舰船科学技术(2021年7期)2021-08-11
家庭影院技术(2021年3期)2021-05-21
家庭影院技术(2020年6期)2020-07-27
儿童时代·快乐苗苗(2018年7期)2018-09-03
无人机(2017年10期)2017-07-06
电子制作(2017年20期)2017-04-26
发明与创新(2016年17期)2016-12-22
发明与创新·大科技(2016年5期)2016-05-17