自动导向轨道系统车辆及其走行部分析
2020-10-13 09:44曲婉孙帅
现代城市轨道交通 2020年9期
曲婉 孙帅

摘 要:自动导向轨道系统在全球范围内获得广泛应用。鉴于产品供应商的不同,各自的名称和采用的标准各不相同,通过汇总梳理各供应商的车型系列,并选取典型车型对其车辆技术性能进行对比,注重对走行系统导向方式的分析,以及基于对自动导向轨道系统车辆和走行部的综合分析,探讨其在国内中运量城市轨道交通领域应用前景。
关键词:城市轨道交通;自动导向轨道系统;走行部;分析
中图分类号:U271.92
2018年以来,国家进一步加强城市轨道交通规划建设管理,促进城市轨道交通规范有序发展,严格建设申报条件。城市轨道交通多样性被热议,中运量轨道交通制式受到越来越多的关注,诸如胶轮路轨系统、自动导向轨道系统、旅客自动运输系统(APM)、自动轻轨车辆(VAL)、自动导向轨道交通系统(AGT)等系统制式被更多的提及。根据行业标准《城市公共交通分类标准》(CJJ/T 114-2007)的分类,国内这些系统制式统一归属为城市轨道交通的“自动导向轨道系统”,车辆为“胶轮特制车辆”,属于中运量城市轨道交通,主要适用于高架和地下。
自动导向轨道系统一般采用独立路权,车辆采用胶轮承载驱动、配置独特的导向装置,具有爬坡能力强、曲线通过能力强、发车密度小等优越性能,可采用自动化运营等级4级(GOA 4)无人驾驶技术实现全自动无人驾驶。在全球范围内,各主要系统制式根据现属供应商的不同可分为4类,分别是:德国西门子VAL系统、加拿大庞巴迪APM系统、日本AGT系统和韩国宇进K-AGT系统,各系统制式自成体系且在全球范围内拥有广泛应用。
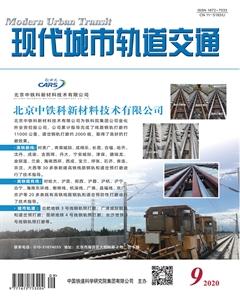
1 车辆产品谱系化
在全球范围内,自动导向轨道系统经过近50年的发展,系统技术成熟可靠,产品不断迭代更新,车型多样化、系列化,能够满足不同业主的需求。
1.1 德国西门子 VAL 系统
VAL(法语Véhicule Automatique Léger的简写)系统最早应用于法国里尔地铁系统,采用VAL 206型(车宽2.06m)车辆,经过验证,该系统具备99.8%的可靠性,随后在全法国乃至欧洲陆续获得推广应用。在欧洲地区主要应用VAL 206、VAL 208(车宽2.08m)车型。为打开美国市场,研制加宽车型VAL 256(车宽2.56m),该车型仅在美国芝加哥奥黑尔机场和中国台北木栅线获得应用。VAL 206、VAL 208、VAL 256和VAL 258属于VAL早期的产品,均采用两侧导向方式;其中,VAL 208是典型产品代表,获得广泛应用。
2006年,西门子推出其最新产品NeoVAL,其采用与Translohr相似的单一中央导轨引导。NeoVAL将分别用于城市和机场的产品命名为“Cityval”和“Airval”。目前,NeoVAL尚无开通运营的商业应用案例,Cityval将应用于法国雷恩B线,Airval将应用于泰国曼谷机场线和德国法兰克福机场线。
1.2 加拿大庞巴迪 APM 系统
加拿大庞巴迪公司将其城市轨道交通车辆统称为“INNOVIA”系列。根据产品的运能、速度等级和适用性的不同,区分为Metro、Monorail和APM等制式,整个产品序列齐全,能够满足城市轨道交通不同等级的需求。
INNOVIA APM产品主要经历3次迭代更新,分别是INNOVIA APM 100(原CX-100)、INNOVIA APM 200、INNOVIA APM 300。最新一代INNOVIA APM 300能够与前两代产品兼容,可在基础设施无需重大改造的基础上从APM 100、APM 200升级到APM 300系统。
此外,庞巴迪公司针对升级改造项目特别设计INNOVIA APM 256车型。例如,台北文湖线是原内湖线与木栅线连通运营后的统称,庞巴迪中标台北内湖线后,为配合原本木栅线采用的VAL 256车辆的运行,特别研制了INNOVIA APM 256型车辆;美国芝加哥奥黑尔国际机场捷运系统2015年开展的项目升级也由庞巴迪中标,为其提供36辆INNOVIA APM 256车辆。全球范围内APM 256车型仅在台北文湖线和芝加哥奥黑尔机场获得应用。
1.3 日本 AGT 系统
20世纪70年代,日本引进美国技术,由日本国内的8个会社共同开发,形成独立的新交通系统标准体系。在日本国内,由多家车辆制造商参与新交通系统的研制,如日本车辆制造株式会社应用于桃花台线的100型车辆、新潟铁工所株式会社应用于东京日暮里舍人线的320型车辆、三菱重工业株式会社(以下简称“三菱重工”)应用于东京新交通临海线的7300型车辆、川崎重工业株式会社(以下简称“川崎重工”)应用于神户新交通的2000型车辆等。
1983年,日本政府统一制定新交通系统标准化及基本设计规范,标准化后车辆的导向方式以侧导向为主。以三菱重工为例,在后续市场开拓中对其车型进行归纳区分,根据车辆主要应用于机场和城市轨道交通项目的不同区分为Crystal Mover和Urbanismo;其中,Urbanismo根据单车总重和载客量的不同区分为Urbanismo-16、Urbanismo-18和Urbanismo-22,以及設计速度达120km/h的超级AGT——Urbanismo Super AGT。
1.4 韩国宇进 K-AGT 系统
韩国K-AGT系统发展相对较晚,其项目应用主要集中在韩国国内。根据车辆应用于机场和城市轨道交通项目的不同区分车型为APMS和Urban AGT,2种车型的系统性能基本一致,但在车辆宽度、动力设置等方面配置不同,以满足不同的应用需求。
1.5 各系统制式车型汇总
各系统制式经过前期的市场开拓和项目应用经验积累,逐步细分市场,搭建品类齐全、车型多样的系列化产品,能够满足不同运能、不同速度等级的中运量轨道交通需求,在全球范围内取得良好的应用示范效应,如图1所示。
2 各系统制式技术参数对比
以庞巴迪的INNOVIA APM 300、西门子的VAL208和Cityval、三菱重工的Urbanismo-22、川崎重工的2000型和韩国宇进的Urban AGT 为例,分析比较各车型主要技术性能如表1所示。
对比VAL、APM、AGT和K-AGT系统主要技术参数,可以得出4种系统制式定位几乎完全相同,单节车体长度在12m左右,定员100人左右(约为地铁B型车的60%),设计速度一般为80km/h,能够满足高峰小时5000~25000人的运能需求,定位于中运量城市轨道交通。
自动导向轨道系统车体定距短,采用单轴转向架,其最小水平转弯半径一般可达30m;车辆走行部系统采用橡胶轮胎,橡胶轮胎黏着力强,加减速性能和抗倾覆稳定性能好,爬坡能力强,一般可达10%;车辆段建设规模相对紧凑,占地面积小,且车辆段维保设备简便,车辆日常检修和大架修要求相对简单;车辆限界小,适用于高架或者隧道线路,能够适应各种不同的线路工况;列车编组可采用带贯通道联挂(多用于城市轨道交通项目)和不带贯通道联挂(多用于机场项目),配合运营行车间隔小,行车组织调度更加灵活;系统更能适应复杂的地形地貌环境,尽量减少征地拆迁工程,有效节省工程投资。
列車采用全自动无人驾驶,不设单独的驾驶室,由自动控制系统和监视系统监控车辆运行并保证安全;无需配备任何司机及值守人员,极大地减少人员配置;列车客室内无操纵台、电气柜等电气设备,使乘客使用面积最大化,提供更佳的乘客体验;列车采用超大的景观车窗,特别是车辆两端设置的超大观景窗,使车辆外观舒适美观且车内视野景观效果好,能更好地融入城市景观环境。
3 车辆走行系统探究
自动导向轨道系统车辆一般每车设置2个单轴走行部,每个走行部配置2个橡胶车轮。为确保行车安全,橡胶车轮均采用防爆胎技术,并装有胎压监测装置实时监测车胎内气压;车辆橡胶轮胎在平滑混凝土路面上行驶,为乘客提供安静、平稳和舒适的乘车体验。与钢轮制式轨道交通相比,自动导向轨道系统的车辆走行部将其悬架功能和导向功能分开,采用胶轮驱动承载,并设置特有的导向装置,其导向方式的差异是各系统走行部的主要区别,导向方式的不同也决定了各系统间无法兼容。
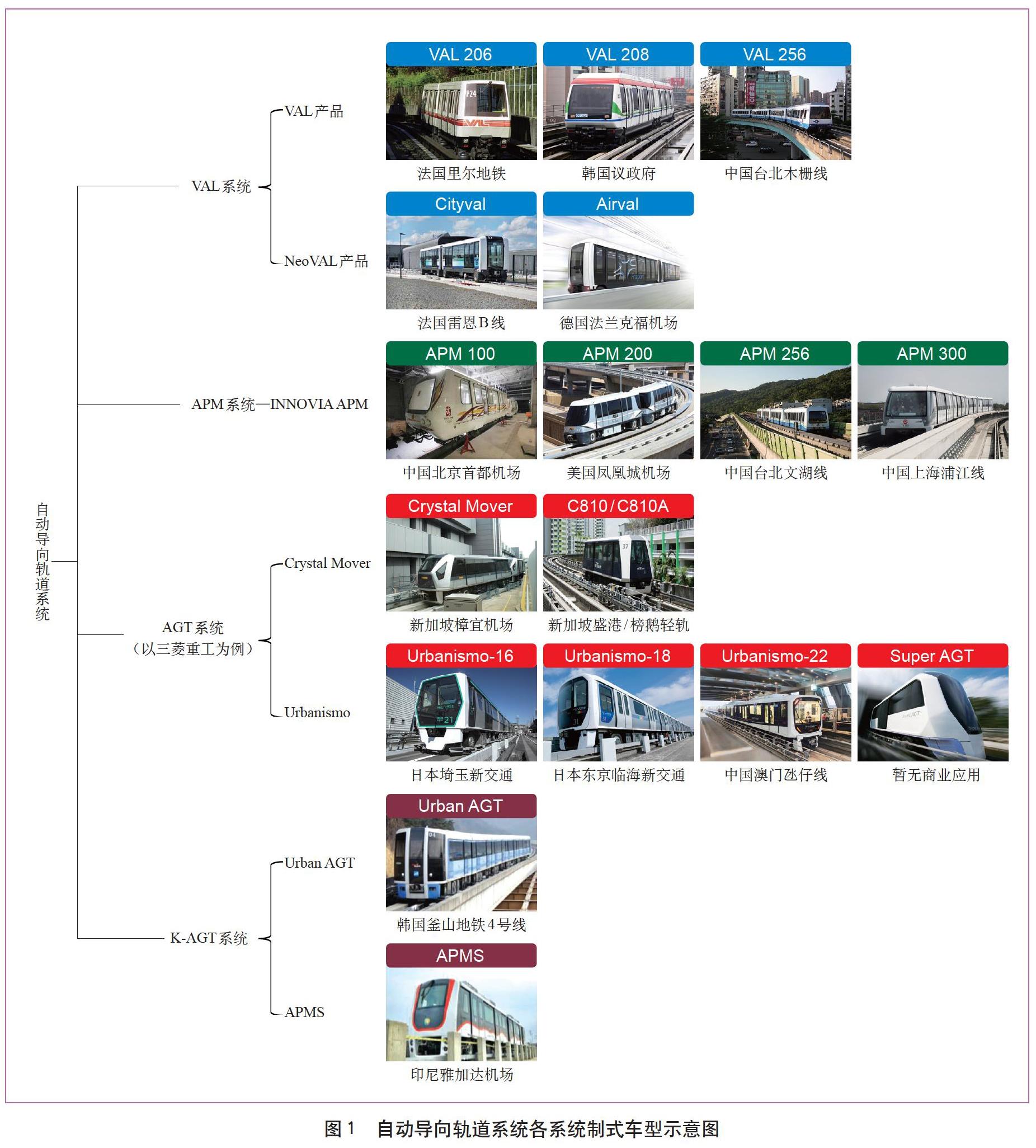
3.1 VAL 系统
VAL系统的VAL产品采用两侧导向方式,而新一代产品NeoVAL采用中央导向方式。
以VAL 206车型为例,其导向系统采用两侧导向方式。导向装置包括前后两侧的4个橡胶导向轮(带有内部金属安全轮)和前后中间的2个导向滚轮(钢轮),线路正常行驶时通过两侧的导轨引导橡胶导轮进行侧导向,车辆过岔区时中央钢轨引导中间导向滚轮进行换道,如图2所示。
NeoVAL产品以Cityval车型为例,导向系统采用中央导向方式。其导向机构由导向装置上2对成90°角的2个导向轮在弹簧力作用下与中央导向轨压合,有效减少了垂直方向的负载,导向轨上方有2个面接触导向轮,导向轮缘嵌入中间导向轨能够保证导向轮永久与导向轨压合,如图3所示。此外,导向系统的工作状态由ATC监控,能够根据车辆前进方向自动控制导向装置前后端导向轮的工作状态。
3.2 APM 系统
APM 100、APM 200、APM 300车型均采用中央导向方式,导向装置由安装在构架上的前后4个导向轮组件组成。其中,APM 100系统的导向轨和导向轮均位于走行轮行走平面以下,APM 300系统的导向轨移动到走行轮行走平面以上,如图4、图5所示。最新一代APM 300的走行部通过导向轮横抱H型钢制导向轨运行,降低车辆重心,提升抗侧倾能力和曲线通过能力,优化动力学性能,提高乘坐舒适度,有效提升车辆导向稳定性。
APM 256车型采用两侧导向方式,主要是对原有的VAL 256进行升级改造,车辆须使用原有的导轨、车站等基础设施,走行系统基本沿用VAL 256的设计,采用两侧导向方式,导向原理与VAL产品类似,如图6所示。
3.3 AGT 系统
AGT系统应用初期同时采用中央导向和两侧导向2 种方式,中央导向方式仅在日本国内的桃花台线(已停运)和山万桉树丘线获得应用。以桃花台线车辆为例,其走行系统采用与APM 100类似的导向原理,在构架中央设置4个橡胶导向轮,橡胶导向轮均位于走行轮行走平面以下(参照图4的APM 100走行部示意图),以引导车辆运行。
1983年,日本AGT系统统一标准后,导向方式以侧导向为主,其两侧导向的走行部主要有4导向轮式(橡胶轮)、2 轴4轮式和4导向轮式(聚氨脂橡胶轮)3种形式,如图7所示。4导向轮式走行部主要应用于神户新交通,2 轴4轮式走行部应用于横浜新都市交通、西武新交通等线路,4 导向轮式走行部应用于横浜新都市交通、中国澳门氹仔线、韩国首尔机场线等线路。相比较而言,2 轴4轮式和4导向轮式应用更为广泛。
2轴4轮式走行部导向装置设置在驱动轴单侧(单车对称布置于两端),每个走行部设置2个导向轮和2个转向轮,导向轮与转向轮同轴上下布置(上轮为导向轮、下轮为转向轮),可通过检测导向轮相对于轨道的横向位移使转向机构转向,以实现车辆转向;当车辆换向行驶时,前后走行部导轮的转向机构相位反转。
4导向轮式走行部导向装置对称设置在前后两侧,每个走行部设置4个导向轮和4个转向轮,导向轮具有引导行车的作用,转向轮具有辅助列车直行和转向的功能,车辆转弯时,每个走行部的单侧转向轮被引入相应的转向轨中,实现列车的直行或转向;4导向轮式走行部能够使车辆完全约束在轨道上,且导向轮能直接产生车辆导向所需的侧向力,增强车辆运行的平稳性,提升车辆小曲线通过能力,车辆操作更加灵活。
3.4 K-AGT 系统
K-AGT系统采用两侧导向方式,车辆的走行部在结构上与日本AGT系统两侧导向的4导向轮式基本类似,同样是每个走行部前后两侧对称设置4个导向轮和4个转向轮,走行系统的导向原理也与两侧导向的AGT基本类似,如图8所示。
4 国内应用前景分析
国内城市轨道交通基于大运量地铁系统已充分发展,中运量城市轨道交通系统或将是未来发展方向;自动导向轨道系统作为中运量制式能够满足业主多样化的需求,该系统在市场开拓过程中不断进行产品更新换代,具备良好的适用性。
(1)采用新材料降低车辆的自重,而载客量明显增加。
(2)优化走行系统使车辆运行更加平稳,同时运行速度等级明显提高。
(3)简化道岔结构形式。其动作时间更短,通过性能优越。
(4)提升信号系统的可靠性,行车间隔更短,结合车辆编组灵活特点,行车调度越发灵活。
(5)自动导向系统通过自身性能的提升,更能适应突发大客流、全天候运营等需求,可在城市机场线和城市客流相对集中的点对点运输线路上灵活使用。
自动导向系统起源于机场项目,对于机场捷运系统项目自动导向系统仍然是首选制式。据不完全统计,截至2019年底,国内已有37个机场年旅客吞吐量达到千万人次以上,除去已建设APM的机场,从国际上众多大型机场发展经验来看,这些机场将来都有建设捷运系统的需求。对于城市轨道交通项目,自动导向系统能够提升城市交通灵活性、综合性能以及运营效率,可用作城市轨道交通网络的加密线、联络线和接驳线,延伸和拓展轨道骨干网络的服务范围,契合城市轨道交通线网多层次发展的需求,也可用作中运量线网规划的选择,是大城市活动中心区内部、新城组团内部或中小城市轨道交通的制式首选。
5 小结
借鉴国内行业标准对自动导向轨道系统的定义,对全球范围内的4种主要系统制式进行分析比较,该4种系统制式的成熟度、可靠性已得到充分論证,车型已形成谱系化,能够满足业主的多样化需求。通过对各系统车辆技术性能和走行系统的比较,自动导向轨道系统在爬坡能力、曲线半径通过能力、运营组织灵活性等方面具有独特的系统优势。因此,自动导向轨道系统在国内中运量城市轨道交通领域具有良好的适用性,尤其是在机场项目和城市轨道交通项目客流相对集中的点对点运输线路上拥有广阔应用前景。
参考文献
[1]CJJ/T 114-2007. 城市公共交通分类标准[S]. 北京:中国建筑工业出版社,2007.
[2]Brian Burkhard, Craig Elliott, Stacy Learn, et al. Dallas Midtown Automated Transportation System Conceptual Engineering Study[R]. Dallas, Texas, United States:North Central Texas Council of Governments, 2018.
[3]Masahisa Masukawa, Hidekazu Ono. AGT: New TOD Solution for Urban Transportation Issues[J].Mitsubishi Heavy Industries Technical Review,2016(9):17-23.
[4]刘盼,许文超. 日本新交通系统发展现状及技术特点分析[J].机械,2014(10):14-18.
[5]李东宇,李芾,李刚. 橡胶车轮城市轨道交通车辆的发展及应用[J]. 电力机车与城轨车辆,2014(9):28-33.
[6]Hitoashi Tsunashima, Daikichi Kondou, Yosuke Sato. Dynamic Analysis of Automated Guideway Transit Vehicle by Multibody Dynamic System[J]. Japan Societyfor Computational Engineering and Science,2003(12):39.
[7]Beom-Gyu Eom, Byeong-Yeon Han, Cheon-Heon An, et al. An Analysis of Dynamic Characteristics for Running Safety Improvement of the Rubber Tired AGT Localization Bogie[J]. The Korean Society for Railway:Proceedings of the KSR Conference,2011(10):1894-1904.
[8]尹燕萍,陆宗彬. 自动旅客运输系统集成研究[J]. 城市轨道交通研究,2019(10):46-48,53.
[9]赵小文. 我国中低运量城市轨道交通发展的几点思考[J]. 城市轨道交通研究,2019(10):1-5.
[10] 浅岡義晴. ゆりかもめ7300系車両の概要[J]. 鉄道車両工業,2013(10):3-6.
[11] 澳门特别行政区审计署. 澳门轻轨系统专项审计报告[R]. 中国澳门特别行政区:审计署,2018.
[12] Francis Kuhn. The Val Lille Urban Community Metros Experience 1972 - 2001[R]. Seoul,Korea:Institut National De Recherche,2001.
[13] 増川正久,片平耕介,河野浩幸. 新交通システム車両向け新形式ボギー台車の開発[J]. 日本機械学会誌,2014(9):633.
[14] Jiaxin Wang, Rui Miao, Zhao Xiaowen, et al. Application of System Engineering in APM Project [J].International Journal of Structural and Civil Engineering Research,2019(8):79-82.
[15] Darai Lajos.K?nny? metrók, VAL rendszerek[R].Budapesti, Magyarország:BME K?zlekedésautomatikaiTanszék,2013.
[16] Mitsuaki Hoshi, Masahisa Masukawa, Ichiro Joren, etal. High-speed Automated Guideway Transit System[J]. Mitsubishi Heavy Industries Technical Review,2015(52):57-60.
[17] 郑亮. 胶轮路轨APM系统走行面的施工管理[J]. 城市轨道交通研究,2018(4):102-105.
[18] 徐曙. 日本城市新交通系统—AGT [J]. 城市轨道交通研究,1998(2):61-65.
[19] Masahisa Masukawa, Yutaka Doi, Kosuke Katahira, etal. New Automated Guideway Transit System Yurikamome 7300 Series Carriages[J]. Mitsubishi Heavy Industries Technical Review,2015(52):65-68.
收稿日期 2020-03-25
责任编辑 司玉林
猜你喜欢
科学与财富(2021年36期)2021-05-10
孩子(2020年12期)2020-01-06
作文评点报·低幼版(2018年17期)2018-07-12
科技传播(2016年19期)2016-12-27
电子技术与软件工程(2016年22期)2016-12-26
科技创新与应用(2016年34期)2016-12-23
价值工程(2016年30期)2016-11-24
企业技术开发·下旬刊(2016年9期)2016-11-23
财经理论与实践(2014年1期)2014-04-02
中学英语之友·高二版(2008年2期)2008-04-08