陆浑土石坝表面变形自动监测系统设计与实践
2020-10-12 14:29程改芳马福恒叶伟
人民黄河 2020年6期
程改芳 马福恒 叶伟
摘 要:土石坝外部变形监测是掌握大坝安全运行性态的重要基础工作,土石坝具有自身变形特征,不能像混凝土坝那样使用引张线仪、静力水准仪实现自动化监测,如何快速准确地监测土石坝表面变形一直是坝工界的难题。结合河南省陆浑水库大坝实际,开展土石坝表面变形自动监测系统方案设计、系统实施及观测资料可靠性分析,评价大坝变形安全性态。实施效果表明,GeoMOS远程控制机器人能够做到快速响应、准确控制,测量机器人的ATR功能识别准确、高效精准,能够实时掌握大坝各测点的位移情况,极大降低了测量人员的内、外业工作量,可为大坝安全运行提供技术保障,也可为同类型大坝的变形自动监测提供借鉴。
关键词:大坝表面变形;自动监测;资料分析;测量机器人;陆浑水库
中图分类号:P204;TU196+.1文献标志码:A
doi:10.3969/j.issn.1000-1379.2020.06.034
Design and Practice on Automatic Monitoring System for Luhun Earth-Rock Dam Surface Deformation
CHENG Gaifang1, MA Fuheng2,3, YE Wei2
(1.Henan Management Bureau of Luhun Reservoir, Luoyang 471003, China;
2.Dam Safety Management Department of Nanjing Hydraulic Research Institute, Nanjing 210029, China;
3.Dam Safety Management Center of the Ministry of Water Resources, Nanjing 210029, China)
Abstract:External deformation monitoring of earth-rock dams is an important part of controlling safe operation behavior of dams. Due to the deformation characteristics of earth-rock dams, it is impossible to use tension line instrument and static level instrument to realize automatic monitoring as used on concrete dams. How to monitor the surface deformation of earth-rock dam quickly and accurately has been a difficult issue to be solved urgently in dam engineering field. Based on the actual situation of Luhun Reservoir in Henan Province, the scheme design, system implementation and reliability analysis of observation data for automatic monitoring system of surface deformation were carried out and the safety state of dam deformation was evaluated. The implementation results show that GeoMOS remote control robot can achieve fast response and accurate control. The identification process of the measuring robot ART is accurate, efficient and accurate, which can grasp the displacement of the dam in real time and greatly reduce the workload of the surveyors both inside and outside. It can provide a technical guarantee for the safe operation of the dam. It can provide reference for automatic monitoring of deformation of similar dams.
Key words: dam surface deformation; automatic monitoring; data analysis; measurement robot; Luhun Reservoir
土石坝填筑材料的离散性、非刚性造成坝体变形的非一致性。依据规范[1],土石坝表面变形包括水平位移和垂直位移,3级建筑物以上为必测项目。非山区水库大坝一般较长,表面变形测点布置较多,观测工作强度大,观测频次少,不能及时掌握大坝变形状态。鉴于土石坝的变形特征,也不能像混凝土坝那样使用引张线仪、静力水准仪实现自动化监测,如何快速准确地监测土石坝表面变形一直是坝工界的难题。杨超等[2]、王豪威等[3]以某水电站大坝位移监测项目为例,研究了MT50全站仪的自有设站、监测精度分析方法以及需要注意的事项;孙华芬[4]在地质调研基础上,建立了M30+GeoMOS尖山磷矿边坡自动监测系统,研究了监测数据的预处理方法及边坡综合预测预报模型;张维[5]分析了徕卡M50全站仪特性,并阐述了该设备在地铁、高铁及大坝等领域的监测方法;王洪[6]以济南市一条污水管道线中的闸道变形观测为例,采用TS30超高精度全站仪结合自由设站法,使其观测精度实现毫米级;管真等[7]在分析MS50全站扫描仪特点的基础上,研究了扫描数据直接进行点云拼接的精度,验证了全站扫描仪在地表变形监测中应用的可行性;吉晓辉[8]基于网络版全站仪自动化监测模式,对高精度、高稳定性这两个重要监测因素进行剖析,利用自主研发的监测系统对某广场基坑变形进行了应用,驗证高精度、高稳定性全站仪自动化监测技术的可靠性;杨浩[9]研究了全站仪任意位置设站观测各点三维坐标的方法,给出了观测值及精度计算公式,并应用于实际工程中;王举等[10]采用三维激光扫描技术对土石坝表面水平与垂直位移进行监测分析,结果表明该技术能够满足水库大坝变形分析计算的要求;马福恒等[11]在对土石坝表面变形监测方法系统研究的基础上,提出了采用高精度全站仪MS50+ GeoMOS的方法实现土石坝全自动监测,并研究了监测数据可靠性判别方法及预警模型,减小了土石坝表面变形监测的工作强度。笔者结合河南省陆浑水库土石坝表面变形监测实际,给出了MS50+ GeoMOS系统的设计方案、实施过程以及监测数据处理方法等,以期为同类型大坝的变形自动监测提供借鉴。
1 方案设计
1.1 工程概况
陆浑水库位于黄河支流伊河中游,坝址位于河南省嵩县境内。水库控制流域面积为3 492 km2,总库容为13.2亿m3,是一座以防洪为主,结合灌溉、发电、养殖、城市供水和旅游等综合利用的大(1)型水利枢纽。该水库于1959年12月动工兴建,1965年8月建成。由于存在安全隐患,因此在1986—1988年进行了一期除险加固,2001年又进行了应急加固,2003—2006年再次进行了除险加固,目前大坝运行性态正常[12]。
大坝为黏土斜墙砂卵石坝,坝顶高程333.0 m,上设1.2 m高的防浪墙,最大坝高55.0 m,坝顶长710.0 m、宽8.0 m,坝基采用黏土截水槽防渗,并辅以84.0 m长的水平铺盖。上游坝坡坡比为1∶3.5~1∶3.25,高程300.0 m以上为六棱柱形混凝土块护坡,300 m以下为块石护坡;下游坝坡坡比为1∶2.75~1∶2.5,均为卵石护坡。
大坝表面变形监测点布设于水库建成之初,为水平位移和垂直位移的共用标点,由于当时使用的是自制的位移标点(普通钢板加工而成),锈蚀严重无法继续使用,因此在1990年由武汉水利电力学院设计、水库管理单位施工建成现在的观测位移基点。使用蔡氏010B经纬仪,采用中间设站、分段观测的方法进行大坝水平位移观测,但视准线长的问题没有得到根本解决,视线模糊、容易受天气影响等问题继续存在,精度很难保证。垂直位移采用蔡氏NI007水準仪进行观测,精度可以保证。
该水库承担着洛阳市防洪、黄河下游防洪和自身保坝三大防洪任务,并和小浪底、三门峡、故县水库联合运用,削减三门峡至花园口区间洪水,水库下游有洛阳、郑州、开封3个重要城市,还有陇海、焦枝、京广3条铁路干线和连霍、宁洛等高速公路以及著名的世界文化遗产龙门石窟,其运行安全至关重要,需要及时掌握大坝变形性态,为此水库管理单位于2018年委托水利部大坝安全管理中心对大坝表面变形自动监测系统进行方案设计[13]。
1.2 监测方案
1.2.1 测点布置
大坝原有表面变形监测点有28个,沿坝轴线布置4排,分别为上游坝坡321.0 m高程、临近坝顶332.0 m高程、下游坝坡320.0 m高程、下游坝坡310.0 m高程,上游坝坡及临近坝顶每排布置监测点8个,下游坝坡每排布置监测点6个,另有工作基点3个。根据工程实际,为实现自动观测,需要新建1座观测房、改造3个工作基点,采用交汇法观测大坝表面变形。
1.2.2 测量机器人
测量机器人启动ATR自动测量时,全站仪中的CCD相机视场内如果没有棱镜,则先进行目标搜索,一旦在视场内出现棱镜,则进入目标照准过程,达到照准允许精度后,启动距离和角度的测量,利用GeoMOS软件进行计算分析。目前,徕卡新一代测量机器人TM50相比第一代测量机器人TCA2003,各项性能指标都有了很大的提升,TM50自动照准距离高达3 000 m,ATR精度最高可达0.5″,距离测量精度达0.6 mm,强大的四重轴系补偿功能,防尘防水等级高达IP65,数据存储方式集成了内存、SD卡、U盘等,新一代驱动马达采用压电陶瓷技术,而且增加了高频率广角相机和高分辨率望远镜相机,使得TM50在自动照准、目标识别、搜索和锁定、自动测量时,更加快速、高效和精确,同时在各种恶劣环境下的适用性和稳定性更强。
1.2.3 系统软件
GeoMOS是一套现代监测和分析软件,适用于自动监测、变形测量、山体滑坡、沉降测量等不同类型的监测任务。它可以将各种不同类型的测量传感器(比如TM50、温度气压传感器、GPS等)连接到一起工作,同时支持多用户进入的大型数据库(SQL-Server),GeoMOS软件主要包括监测和分析两部分,都可以在计算机上运行。
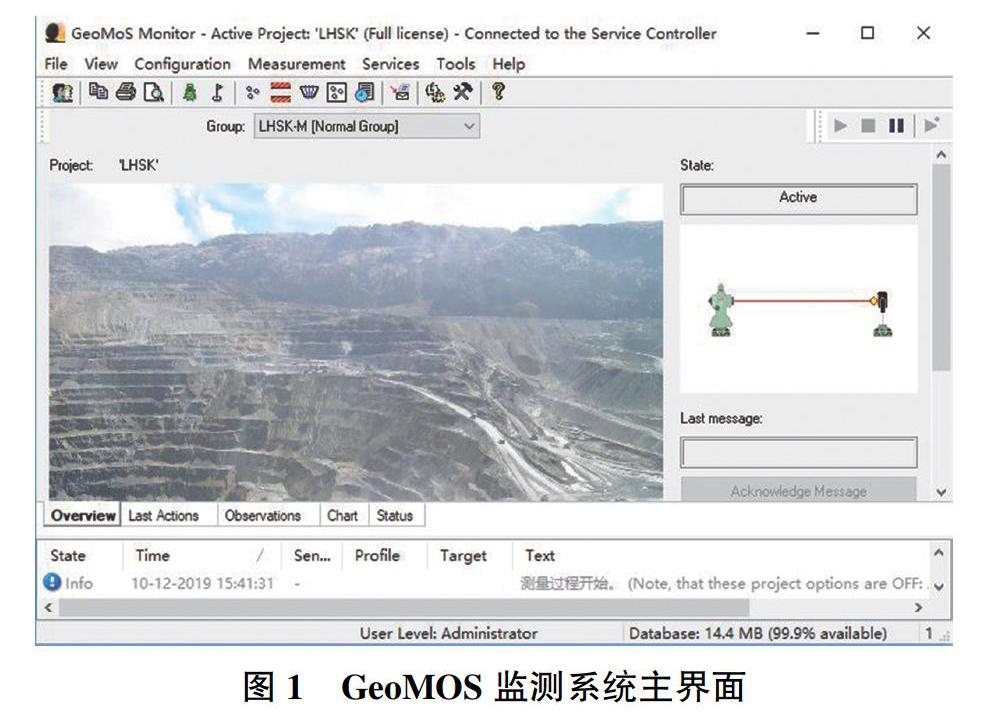
GeoMOS监测部分是一个在线的工作软件,主要负责控制传感器、收集数据以及事件的管理,主界面见图1。
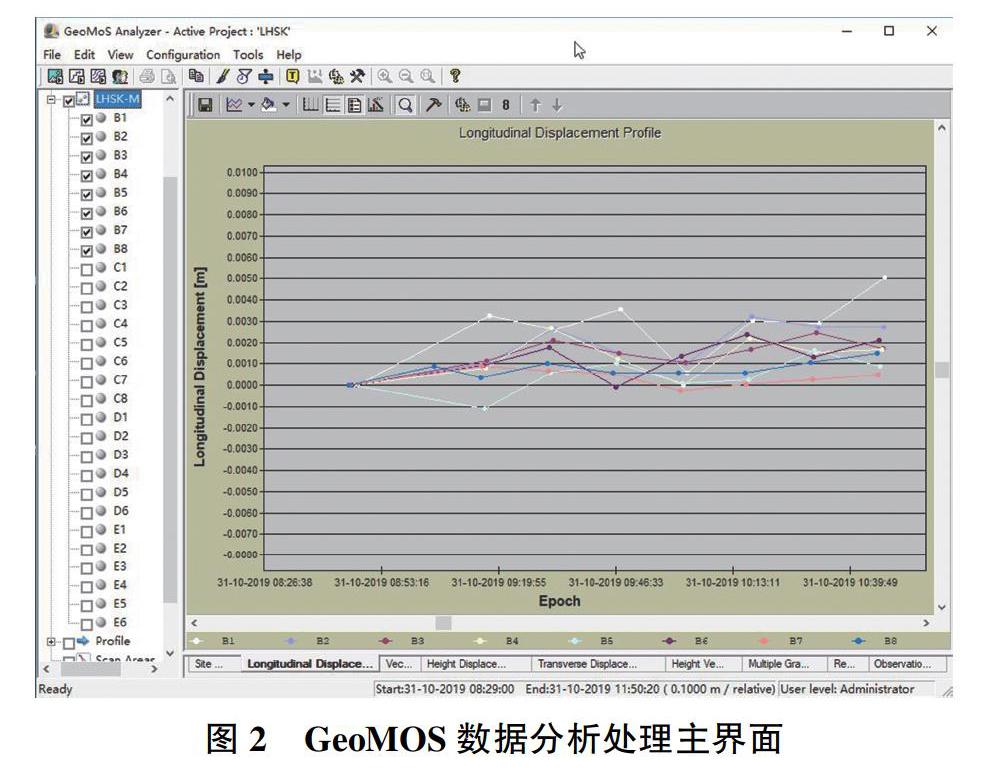
GeoMOS分析部分是一个分体式的软件,主要用于测量数据的分析、可视化和后处理,主界面见图2。
1.3 系统组成
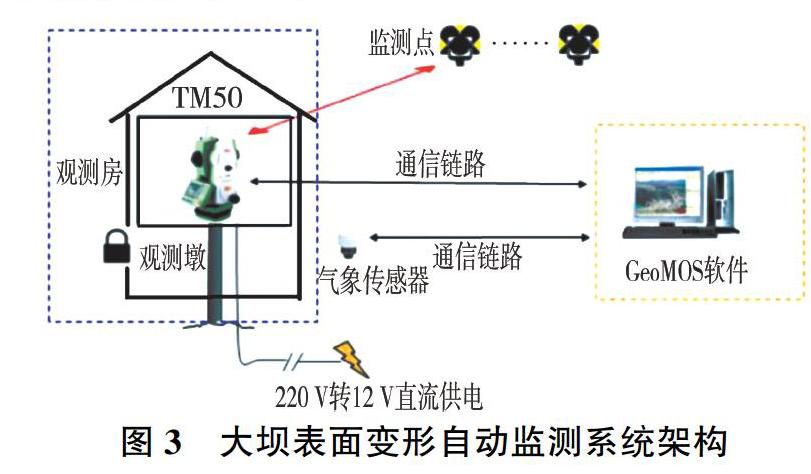
陆浑水库大坝表面变形自动监测系统包括3部分,系统架构见图3。
(1)监测子系统。远程控制TM50按照监测任务对监测点棱镜进行自动观测,同时采用徕卡温度和气压传感器自动、实时采集环境温度和气压数据,通过光纤将监测点的坐标和温度、气压数据传输到数据中心,该子系统主要由TM50、反射棱镜、温度和气压传感器组成。
(2)数据通信子系统。监测子系统与数据中心之间采用光纤通信方式传输全站仪和温度、压力传感器的数据至数据中心。
(3)数据中心子系统。主要由服务器和GeoMOS软件组成,GeoMOS软件能同时控制全站仪、温度及气压传感器等不同用途的设备,对TM50进行远程配置,并控制其进行外业自动观测,接收监测子系统的测量数据,依据温度和气压传感器测得的数据,自动对TM50的测量成果进行气象修正,并对最后的测量数据进行计算、分析,根据预设限差发布预警信息。
2 实施与测量
陆浑水库大坝表面变形自动监测系统于2018年9月开始实施,12月完成。
2.1 测站、基准、测点改造
为实现变形监测自动化,根据陆浑大坝变形监测的实际需要以及外业观测的客观条件,在大坝左右两岸的稳定地带设置了3个基准点(J1~J3),基准点的观测墩采用钢筋混凝土浇筑,基础深挖至基岩,基准点上永久安置强制对中的反射棱镜,并用专门的不锈钢保护罩对反射棱镜加以保护。同时在上游坝坡、坝顶、下游坝坡分别设置4排共计28个监测点(B1~B8、C1~C8、D1~D6、E1~E6),所有监测点均采用混凝土基础浇筑,为防尘防盗,在观测墩上安装永久强制对中的反射棱镜及不锈钢保护罩。
TM50测量机器人(测站点Z)安置在大坝右岸,为保护仪器设备,建造专门的观测房,观测房内浇筑混凝土观测墩,观测墩上安置强制对中底盘,TM50长期固定在对中底盘上,观测房面向大坝一侧留有大开口的观测窗,观测窗口视野开阔,3个基准点和28个监测点均可通视,观测窗安装有电动卷帘,可以根据测量任务远程控制起闭。此外,为了进行距离测量的温度和气压修正,在观测房的一侧房檐下安置传感器,温度和气压数据连同坐标测量值可以同步传输至中心机房,并通过GeoMOS软件对测距数据进行气象修正。观测房及测量机器人见图4。
2.2 基准点测量
基准点是进行变形监测的起算点,需要布设为控制网,如图5所示,采用自由设站法,将测站点Z设为坐标原点,以顺河方向为X轴,大坝轴线方向为Y轴,建立一套独立坐标系统,Z点的平面坐标设为(X=0,Y=0)。将TM50机器人架设在Z点观测墩,运用ATR对于J1~J3分别进行4个测回的自动照准测量,经过平差后获取J1~J3的基准坐标值。考虑到基准点的长期使用和变化,为了保证监测系统的精度,今后每年对这3个基准点至少复测一次。
J1~J3的基准坐标值的准确性非常重要,因为考虑到测站点Z位于大坝右岸山体上,它的稳定性能否充分满足变形监测的要求,要在每次开始测量之前,利用J1~J3这3个基准点作为已知后视点进行一次后方交会测量,从而精确计算出测站点Z的坐标值。后方交会理论上有2个后视点即可完成坐标计算,但为了进一步提高坐标解析计算的精度,陆浑水库实际采用了3个后视点,保证至少有1个冗余观测值,而且在基准点的位置选址之初,需要根据水库大坝实际,保证这3个后视点与测站点之间形成的角度比较合适,基本将它们两两之间的夹角控制在30°~150°之间,这就提高了通过后方交会方式解析计算出测站点Z最终坐标的准确性。
2.3 变形测量
大坝表面变形正式测量前,首先需要对28个監测点进行一轮学习测量,以确定它们的起始坐标值,今后每个测量周期内测量的各个测点坐标都将与这个起始坐标值进行比对。对变形测点的测量,运用TM50测量机器人的ATR功能,采用正倒镜的方法测量这28个测点的起始坐标值(X0,Y0),该坐标为极坐标转换的大地坐标,然后根据坝轴线的方向及测点布置位置,在GeoMOS软件测点设定模块中进行坐标转换[6]。在第一个测量周期,再次使用同样的方法测得这28个监测点的坐标值(X1,Y1),在第二个测量周期,测得这28个监测点的坐标值(X2,Y2),每一个测量周期的坐标值(Xn,Yn)都将会自动与起始值(X0,Y0)和临近值(Xn-1,Yn-1)进行比较,快速获取这个测点的当前位移变化值和累计位移变化值,随着观测数据量的增加,可以看出每个测点的位移变化趋势。以上周期性测量,都是在中心机房内通过GeoMOS软件提前设定好测量程序,然后远程开启观测房的电动卷帘,同时激活TM50测量机器人,剩下的观测工作全部交由机器人按照设定程序自动完成,实现自动观测,降低了观测人员的工作强度,提高了观测精度和实时性。
3 数据处理与成果分析
3.1 数据处理及测站稳定性分析
(1)数据处理。采用GeoMOS软件中多测回测量处理模块以及相应平差软件对28个监测点进行坐标计算,计算成果直接写入数据库。
(2)测站点位置稳定性分析。自由设站后测出基准点J1的坐标,然后以J1为定向点,观测基准点J2各期观测坐标并与首次观测值比较,上下游水平位移ΔX绝对最大值为0.8 mm,左右岸水平位移ΔY绝对最大值为0.6 mm,垂直位移ΔS最大值为1.0 mm。由此可知,J1、J2两个基准点位置稳定,自由设站精度较高,能满足大坝表面变形监测精度要求。
3.2 观测成果分析
随着测量周期的逐渐延长,测点的测量数据越来越多,现以2019年4月—2019年10月为例,以B1~B8这一排监测点为具体对象,GeoMOS软件采集数据经过整编后给出的测点顺河向变形情况如图6所示。可以看出,位于坝顶位置的测点B1位移较大,尤其是X轴(上下游水平位移)方向的位移更加明显。随着测点远离坝顶,其位移逐步减小,全部监测点的位移变化值都保持在0.5 mm左右,与前期人工观测结果相符,符合土石坝变形的一般规律,比较准确地反映了陆浑水库大坝的实际变形情况。由于垂直位移观测精度大于1.0 mm,不满足土石坝安全监测技术规范要求,因此陆浑水库大坝沉降测量采用电子水准仪徕卡DNA03来完成,测量成果直接导入大坝安全监测自动化系统,实现自动分析与预警[13]。
4 结 论
结合河南省陆浑水库大坝实际,开展了土石坝表面变形自动监测系统方案设计、系统实施及观测资料可靠性分析,发现临近坝顶的测点B1位移较大,随着测点远离坝顶,其位移逐步减小,全部监测点的水平位移都保持在0.5 mm左右,与前期人工观测结果相符,符合土石坝变形的一般规律,比较准确地反映了陆浑水库大坝的实际变形情况。相比传统的人工观测方法,效率和精度都得到了显著的提高,而且极大地降低了测量人员的内、外业工作量。垂直位移由于观测精度大于1.0 mm,不满足规范要求,需要采用电子水准仪徕卡DNA03进行监测,通过将测量成果导入大坝安全监测自动化系统,实现自动分析与预警。该系统能够实时掌握大坝各测点的表面变形情况,为大坝安全运行提供技术保障,也可为同类型大坝的变形自动监测提供借鉴。
参考文献:
[1] 中华人民共和国水利部.土石坝安全监测技术规范:SL 551—2012[S].北京:中国水利水电出版社,2012:55-58.
[2] 杨超,王豪威. TM50全站仪在电厂水平位移监测中的应用研究[J].经纬天地, 2017(4):45-49.
[3] 王豪威,陈慧建,李云涛.基于边角后方交会的电厂变形监测应用研究[J].现代测绘,2016(1):33-35.
[4] 孙华芬.尖山磷矿边坡监测及预测预报研究[D].昆明:昆明理工大学,2014:60-65.
[5] 张维.徕卡全站扫描仪MS50在变形监测中的应用[J].测绘通报,2014(6):131-132.
[6] 王洪.徕卡TS30超高精度全站仪在变形监测中的应用[J].辽宁工程技术大学学报(自然科学版),2015,34(3):401-404.
[7] 管真,黄声享,贾桂宝.全站扫描仪在地表变形监测中的应用研究[J].北京测绘, 2017(增刊1):181-185.
[8] 吉晓辉.高精度高稳定性全站仪自动化监测技术研究[J].铁道勘察,2017(6):27-30.
[9] 杨浩.全站仪任意坐标系三维变形监测方法[J].测绘地理信息, 2017,42(1):61-64,68.
[10] 王举,张成才.基于三维激光扫描技术的土石坝变形监测方法研究[J].岩土工程学报,2014,36(12):2345-2350.
[11] 马福恒,李子阳,胡江.土石坝安全监控与预警技术及应用[M].南京:河海大学出版社,2016:12.
[12] 李子阳,马福恒,程改芳.河南省陆浑水库大坝安全综合评价报告[R].南京:南京水利科学研究院,2015:12.
[13] 马福恒,刘小军,程改芳,等.河南省陆浑水库大坝安全监测系统改造完善方案[R].北京:水利部大坝安全管理中心,2018:5.
【责任编辑 张 帅】