足式爬行机器人研究进展与发展趋势
2020-10-12 08:23陈致远涂群章张详坡蒋成明
兵器装备工程学报 2020年9期
陈致远,涂群章,张详坡,潘 明,蒋成明,黄 皓
(陆军工程大学 野战工程学院, 南京 210007)
足式移动机器人(以下简称为足式机器人),有别于轮式、履带式移动机器人,是通过驱动类似于腿的装置来移动自身的机械系统。自20世纪60年代Mosher等[1]研发了第一款足式机器人以来,该机器人由于对复杂地形有着良好的适应性,受到了广大科研工作者的关注。
如图1所示,足式机器人根据运动形式可以分为足式爬行机器人和足式步行机器人。足式步行机器人的腿部机构位于机体的下方,机体、腿、足呈竖直分布,类似于哺乳动物;足式爬行机器人的腿部机构安装在机体的侧面,一般来说靠近机体的腿节水平布置、靠近足端的腿节竖直布置,类似于昆虫。与步行机器人相比,足式爬行机器人可以在更宽阔的空间中选择落脚点,在复杂地形上展现出更好的通过性。另外,较大的支撑多边形和较低的重心使得足式爬行机器人具备较好稳定性。因此足式爬行机器人在人道主义扫雷[2]、军事侦察[3]、星球探索[4]等领域具有显著的优势和广阔的应用前景。

图1 步行机器人与爬行机器人的不同特征效果图
足式爬行机器人可以按照遥控指令或自主地通过步行机器人难以通过的复杂山地陡坡,这对其运动的精度、稳定性、续航能力提出了很高的要求。其腿部串并联机构的强耦合性和工作环境的复杂性导致足式爬行机器人运动稳定性的控制是一个不易解决的问题。因此,设计出结构精良、运动控制精确、能量效率高的足式爬行机器人吸引着国内外众多研究人员,是当今机器人领域的研究热点之一。
本文首先对足式爬行机器人近十年来国内外研究进展进行了总结,将足式爬行机器人分为仿生和非仿生两类综述其结构与性能特点;从腿臂机构的创新设计、稳定性标定技术、爬行步态规划与运动控制、机器人感知技术4个方面介绍了足式爬行机器人研究的关键技术;并对足式爬行机器人的发展趋势进行了展望。
1 足式爬行机器人分类及研究进展
1.1 非仿生足式爬行机器人
国内外对非仿生足式爬行机器人开展研究的机构主要有宾夕法尼亚大学[5]、日本东京工业大学[6]、北京航空航天大学[7]等。按照有无可变机构设计,将上述机构研制的几款非仿生足式爬行机器人分为两类分别介绍其结构和功能,如表1所示。

表1 非仿生足式爬行机器人列表
2010年,宾夕法尼亚大学在RHex[8]的基础上研制了新一款的六足爬行机器人X-Rhex[5]。如图2(a)所示,RHex的腿部是一个半圆形机构,通过腿部的旋转运动推动机体移动;虽然机械结构简单,但是RHex可以实现爬行、前翻、爬楼梯等多种运动。X-RHex机体框架使用表面覆盖碳纤维的铝板,C型腿采用玻璃纤维,在减轻质量的同时增加了框架刚度。机体更加轻巧坚固,即使受到严重冲击也能保证机体内部硬件不受破坏。质量的降低也在一定程度上优化了机器人的机动性能。

图2 无变构设计足式爬行机器人效果图
2016年,东京工业大学研制了最新一款的TITAN系列机器人——TITAN-XIII[10],如图2(b)所示。相较于之前版本的TITAN机器人[6],TITAN-XIII装有新型的传动装置,采用超高分子量聚乙烯纤维替代传统绞线,因此有着更加紧凑的机身、更轻盈的质量、更快的移动速度、更高的比功率以及更强的续航能力。通常来说爬行机器人在能量效率、移动速度上都不如步行机器人,但是TITAN-XIII的能量效率可以与步行机器人(StarlETH[11]等)比肩,它的弗劳德数(衡量机器人移动速度的标准化系数)与步行机器人(Cheetah Robot[12]等)大致相等。
如图2(c)所示,北京航空航天大学研制了一款质量仅为190 mg的小型轻量化足式爬行机器人[7]。可以外接电源或机载电容通过铝硅键合线给机身两侧的极板供电,在机身内部形成电磁场,利用机身内部镍钛束的自激静电作用驱动机器人运动[13],速度可达30 mm/s(约1.5身长/s)。但是机器人的运动稳定性难以保证且无法控制其运动轨迹。在此基础上,北京航空航天大学于2019年研制了一款新型的电磁驱动的微型足式爬行机器人[14],如图2(d)所示。总质量仅为137 mg的机器人最大爬行速度可达232 mm/s(约18.9身长/s)。当施加在电磁铁上的交流电压的频率与系统的固有频率相匹配时,机身前侧的永磁体和横梁会在周期性电磁力的作用下激发共振,与横梁连接的前腿会与地面产生向上向前的力,实现爬行机器人的向前跃动。
2019年,国立首尔大学研制了一种可双面爬行的六足机器人MutBug[15],如图2(e)所示。MutBug结构紧凑,高度仅有15 mm。无论是顶面朝上爬行还是底面朝上爬行,最大速度都可以达到0.53 m/s(约5身长/s),即使在复杂地形上机体倾覆,也不会影响到MutBug的正常运行。
2020年,哈尔滨工业大学研制了一种四足机器人[16],如图2(f)所示。该机器人由机体、4个悬臂腿、4个偏心轮振动电机等模块组成。通过偏心振动马达的激励,悬臂腿与地面之间产生的摩擦力能够驱动机体向前、向后和转弯运动。该机器人没有复杂的机械传动装置,运动灵活、速度快,具有一定的承载和越障能力。
为了提高机器人的移动速度及对复杂地形的适应能力,有些科研人员将足式结构与轮式、履带式、球式结构相结合,设计了轮-足、履-足、球-足复合的可变腿部结构。
2010年,东京工业大学研制了一款履-足复合的四足爬行机器人TITAN-X[17],如图3(a)所示。TITAN-X可以根据地形选择运动形式,在复杂崎岖的地形上采用足式行走,在平坦或起伏不大的地形上采用履带行驶。其爬行速度可达0.15 m/s,采用履带行驶时可以稳定不打滑地上下楼梯、顺利通过400 mm宽的壕沟,履-足配合能够翻越高度的是其1.8倍的障碍。
2014年,台湾大学研制了一款轮-足复合的四足爬行机器Quattroped[18],如图3(b)所示,其包含了结构可变的轮腿机构:在崎岖地形上采用的C型腿结构,能够实现类似于X-RHex机器人的爬行运动;在平台路面上采用的轮模式,则能够实现机器人的快速机动。
2017年,丰田公司研制了一款模块化的足式爬行机器人Snapbot[19],如图3(c)所示。机器人有3组(翻滚-俯仰、偏航-俯仰、翻滚-俯仰-偏航)共18个模块化的腿部机构,通过磁性联轴器与机体连接0~6条腿,可以组成700种不同的构型。机体可以识别出腿的配置方式进而采用不同的步态进行运动。
2019年,北京航空航天大学设计了一种将球形无人机与足式机器人相结合的混合式运动机器人[20]如图3(d)所示。通过1个旋翼和8个尾翼可以实现空中飞行。在地面运动时,可以将4条3自由度腿部机构伸展在崎岖地面上爬行,也可以将腿部机构蜷缩在地面上滚动。此外,4条腿部机构还可以用于搬运物体,辅助飞行着陆。目前该机器人的研制处于模拟仿真阶段,尚未研制出原理样机。
1.2 仿生足式爬行机器人
自然界中存在多种足式爬行生物,为研究仿生足式爬行机器人在运动机理和行为方式、感知模式和信息处理、协调控制和计算推理、能量代谢和材料结构等多方面提供了参考。本研究按照仿生原型对国内外研制的仿生足式爬行机器人进行分类总结,如表2所示。图4展示了这些机器人与其仿生原型。
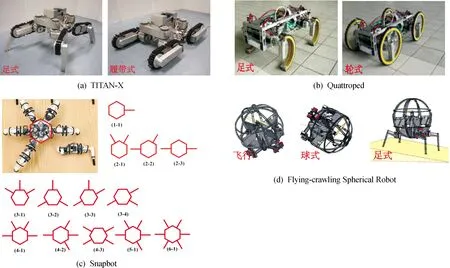
图3 变构设计足式爬行机器人效果图

表2 仿生足式爬行机器人列表
2012年,南京林业大学以甲虫为仿生原型,设计了仿生甲虫六足机器人[21]。躯体呈椭圆形结构,六条腿分布在机体两侧。采用关节电机驱动机器人运动,并且规划了机器人的直行和定点转弯步态。为减轻机器人质量提高移动速度,机体采用铝合金材料,腿部采用高强度塑料。
2013年,哈尔滨工程大学研制了一款六足仿蜘蛛机器人[22]。机器人每条腿有3个自由度,能够采用三角步态实现直行、横行和定点转弯。设计了中枢模式发生器,控制机器人的步态切换以提高对复杂环境的适应性。
2015年,新加坡科技设计大学以一种栖息在沙漠中的猎食性蜘蛛Cebrennus rechenbergi为仿生原型研制了一款自重构的仿生机器人Scorpio[23]。正常情况下,蜘蛛采用八条腿爬行运动。然而,如果受到外界刺激或威胁,蜘蛛可以快速地翻滚以规避潜在的危险。基于此,Scorpio有两种基本构型,可以实现四足爬行和环形滚动。2017年,Scorpio又被赋予了爬墙的能力用以城市环境下的侦察与搜寻任务[25]。
2015年,凯斯西储大学研制了一款仿生螳螂机器人MantisBot[26]。通过分析螳螂肢节的活动形式和关节转动范围,Nicholas为MantisBot设计了28个自由度来尽可能地模拟螳螂的运动。

图4 仿生足式爬行机器人及其仿生原型效果图
2016年德国人工智能研究中心研制的仿生螳螂机器人MANTIS[27]旨在实现非结构化地形上的高机动性以及操作能力。类似于螳螂,MANTIS有四足爬行和六足爬行两种基本运动姿势,其中两条前腿可以作为手臂,通过配备的夹持器使得其能够执行双臂操作。电池以及控制器等电子设备安装在机器人机体后部类似于螳螂腹部的位置,可以平衡上半身的重量。
为了让机器人具备水陆两栖的运行能力,哈尔滨工程大学于2017年研制了一款新型仿生蟹机器人[28,29]。该机器人拥有6条三自由度的爬行腿和两条三自由度的划桨,可以在陆地和海床爬行,也可以利用两支划桨在水中游动,腿桨复合驱动拓宽了机器人的运动形式。实验结果表明,相较于传统的波浪步态,机器人在水中运行时采用腿桨复合步态能够提高54%的移动速度并且降低45.6%的总运输成本(total cost of transport,TCoT)。
2018年,印度理工学院设计并制作了一款仿鳄鱼机器人,Alli-bot[30]。该机器人以短吻鳄为仿生原型,有四条二自由度的爬行腿。机体躯干轴上共有4个转动关节可以有效模仿短吻鳄摆动爬行。Agrawal 采用贝叶斯方法优化了步态参数,使得机器人的平均移动速度提高了93%。
2019年,Xing等[31]研制了一种新型小型海龟式水陆两栖机器人ASRobot,可用于执行海底复杂环境下的探测任务。特别的,Xing设计了一种腿式多矢量水射流复合推进机构(Legged Multi-Vectored Water-Jet Composite Propulsion Mechanism,LMVWCPM)。该机构由一个水射流推进器和3个转动关节、3个连杆组成。利用该机构,机器人能够在路面地形爬行,在水下环境游动。
国内外学者的研究探索下,仿生多足移动机器人在仿生机构设计与运动控制等方面都取得了长足的进展,并初步具有了高级生命形态特征。
2 灵巧机构的创新设计
机械结构设计是开展机器人运动和控制研究的前提和基础。巧妙的机构设计能够有效地提高机器人的运动能力,降低对驱动器、控制器的性能需求,拓展机器人的功能,减少机器人的能源消耗。
KeisIuke[32]为TTAN-IX设计了足端执行器更换装置,通过更换搭载在机体上的扫雷探测器、铲型爪具等排雷工具,使得机器人可以应用于人道主义扫雷行动。当然,如果更换其他工具,机器人还可以执行另外的任务。四条腿采用模块化设计,当扫雷过程中某条腿发生损坏时可以进行替换。同时,考虑到工作环境的复杂性,Keisuke在膝关节处添加一对连接大腿和小腿的子连杆扩大了膝关节的运动范围,如图5所示。
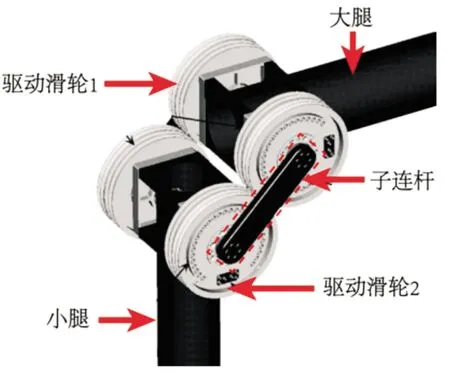
图5 TITAN-IX腿部机构示意图
2016年,Satoshi[10]为最新一代的TITAN-XIII设计了一个内部安装了张紧螺栓的传动带轮以便于调节纤维绞线张紧力,如图6所示,有效解决了纤维的变形伸长问题。

图6 TITAN-XII张紧装置示意图
设计机器蟹时,陈东良[33]创新性地将应变梁结构应用于机器蟹足端的力觉检测与反馈系统,这能够极大程度地简化机构。实验结果表明:系统测量精度高,响应时间短,能够有效地感知障碍物情况,提高了机器蟹对复杂障碍环境的适应性。王立权[34]在通过蜗轮蜗杆减速器将转矩从嵌入在肢节中的电机传递到关节处。利用蜗轮蜗杆传动的自锁特性保证机器人在突然断电的情况下能够保持姿态避免倾覆损坏。
对于复合移动机器人,Ryuichi[17]在研制腿-履复合移动机器人TITAN-X时将履带驱动系统集成在爬行驱动系统中,克服了传统复合移动机器人驱动复杂的问题。小型轻量化的运动模式变换机构克服了传统复合移动机器人质量重、体积大的问题,能有效发挥足式和履带式运动的优势。
在驱动器方面,Meng[35]设计了一种由形状记忆合金(Shape Memory Alloys,SMA)制成的弹簧驱动的爬行机器人。该机器人通过存储和释放形状记忆合金的弹性能量来驱动机器人内部的滑块进行往复运动,进而带动机体向前运动。机器人内部机构示意图如图7所示。更特别的,Alexander[36]和Kim[37]使用折纸来构造机器人的驱动机构,如图8所示。折纸塔类似于弹簧可以伸长和压缩,左右两个直流电机分别驱动左右两个折纸塔的伸缩,实现向前运动和转向。纸张质量轻的特点为轻型机器人的研制提供了新思路。

图7 SMA弹簧驱动机器人机构示意图

图8 折纸塔驱动机器人示意图
正如上文所讨论的,创新性的机构设计能够有效提高机器人性能,研究爬行生物的结构机理将进一步推进足式爬行机器人的发展。
3 稳定性标定技术
足式爬行机器人的主要功能是提供稳定的运动,特别是在崎岖的山地环境下不发生跌倒,因此稳定性分析对多足机器人的控制是非常重要的。目前学者们提出了多种衡量运动稳定性的判据,通常分为静态稳定性标准和动态稳定性标准。本文依据判定指标进一步将稳定性判据分为四类:基于距离、角度、能量、力的稳定性判据,如图9所示。

图9 运动稳定性判据分类框图
基于距离的稳定性标准关注重心投影与支撑多边形之间的距离。通过确定机器人重心的水平投影位置是否在机器人足端构成的支撑多面体内部来判断其稳定与否,并将重心的水平投影距支撑多边形的最短距离定义为稳定裕度(Stability Margin,SM),如图10所示。
SSM=minLi,i=1,2,…,n
其中:n为支撑腿的数量;Li为重心水平投影位置到第支撑多边形第i边的距离。

图10 SM计算示意图
基于角度的稳定性标准采用作用在重心上的合力矢与支撑多边形之间的角度作为衡量稳定性的标准。在这类稳定性标准中被广泛使用的是力角稳定裕度(Force Angle Stability Margin,FASM)[38],当在重心上的合力矢FR与竖直方向之间的角度α的乘积为零时系统被判定为不稳定,合力矢与最小角度的乘积即为FASM。然而,力角测量需要精确的接触点位置和矢量计算,在不规则地形上的使用是一个严峻的挑战。
SFASM=||FR||·min(αi)
考虑到重心高度和机器人质量的影响,Hirose[39]和Garcis[40]分别将机器人绕支撑多边形边界发生侧翻的最小势能的能量稳定裕度ESM和考虑外力以及惯性负载影响下的动态能量稳定裕度DESM进行了标准化,提出了标准化能量稳定裕度(Normalized Energy Stability Margin,NESM)和标准化动态能量稳定裕度(Normalized Dynamic Energy Stability Margin,NDESM)。
其中:i为支撑多边形作为倾覆轴的边;Δhi表示以i边倾覆时COG高度的变化;Ei表示i边的稳定性度量。
当机器人发生侧翻时,除了组成侧翻轴的支腿,其他支腿的足端力将变为零。基于力的稳定性标准通过考察机器人足端接触力的情况来判断机器人的稳定性。MAHDI[41]提出了一个能够度量足端力稳定性的判据——足端力稳定裕度(Foot Force Stability Margin,FFSM),并基于此推导了适用于在线和实时控制器的改进足端力稳定裕度(Modified Foot Force Stability Margin,MFFSM)。
其中:fi表示第i个支撑腿足端力的竖直分量;hi为COG高度;Pi为由重心位置指向重心在支撑面投影点到倾覆轴垂足的向量,如图11所示。

图11 FFSM和MFFSM计算示意图
Elena[42,43]基于SOIL4在6种不同地形上的运动计算了SM、FASM、NESM等稳定裕度;Mahdi[44]对比了FASM、FFSM、MFFSM。实验结果均表明,应根据机器人的应用场景采用合适的稳定判据来控制机器人的步态,否则可能会影响机器人的工作性能,尤其是在不规则地形上考虑惯性力和外力影响的情况下,不存在最优标准。
4 爬行步态规划与运动控制
步态规划的主要参数包括腿的运动顺序和时间,以及支撑阶段和运动阶段的比例。足部爬行机器人的步态可分为周期步态和非周期步态,其中周期步态可分为连续步态和非连续步态。适当的步态规划可以提高机器人的运动速度,增加稳定性裕度,降低机器人的能量消耗。在步态规划的基础上,运动控制是设计一个有效的控制器使得机器人达到预期的运动。国内外学者提出了多种足式爬行机器人的步态规划和运动控制策略。本文将这些控制策略分为三类:基于模型的控制策略、自适应控制策略和仿生控制策略。
4.1 基于动力学模型的控制技术
Loeffler[45]提出了一种3层架构控制器,如图12所示。上层基于3种基本的运动形式(站立、行走、小跑)规划机器人的运动,这3种行走模式的最优轨迹都是离线计算好的,可以在运行时直接访问;中层是建立在Pentium III芯片上的动力学模型,通过来自传感器的数据计算关节状态;底层采用PID控制器控制关节运动。

图12 3层架构控制器框图
GO[46]同样采用运动学模型控制六足机器人,列出约束条件求解机器人逆运动学。但是算法假设机体坐标系始终与地面平行,不能用于非均匀地形。为了解决在线计算量大的问题,Loc[47]提出了一个基于三维几何分析的算法,该算法使得机器人在执行下一个步态时不需要进行复杂的逆运动学计算就获得稳定的姿态空间,提高了机器人在复杂地形条件下的通行效果和效率,并基于MRWALLSPECT IV机器人进行了仿真和实验验证,试验表明机器人能够有效克服跨度是其腿长70%的障碍。Satoshi[48]基于纵向加速轨迹算法(longitudinal acceleration trajectory,LAT)提出了LA-不连续对角步态并将其应用于TITAN-XIII,实验表明机器人能够保持动态稳定性。
文献[49]中针对液压驱动机器人提出了一种结合刚度控制和阻尼控制的基于位置的阻抗控制方法。该方法可以有效地解决传统位置/力控制中位置控制和力控制之间的切换导致关节电机速度快速变化的问题。基于六足机器人简化模型,文献[50]中提出了一种包括位置PID闭环控制和姿态PID闭环控制的闭环控制策略。仿真和样机实验结果表明,该六足机器人在非均匀地形下具有良好的适应性。
由于机器人系统以及运行环境越来越复杂,难以对机器人在其环境中的行为进行准确建模,控制器的参数需要在线更新,不利于进行实时控制。
4.2 地形-步态自适应控制技术
由于机器人的参数不能精确已知,且模型参数与实际系统参数不符将会产生伺服误差。因此,采用自适应控制方法,有望通过学习算法不断更新模型参数以消除误差提高控制精度。
Kirchner[51]基于六足机器人SIR ARTHUR,采用分层Q-学习法使得机器人能够实现目标导向的行走行为。该自适应算法具有三层学习性能:第一阶段是基本动作的学习,如单腿的摆动和站姿动作,目标是在状态空间中尽可能地寻找和跟踪最优轨迹;第二层是按一定的时间序列激活基本动作以执行运动行为,如整个机器人的向前移动;第三层学习如何采用第二层的复杂行为实现给定环境和外部刺激下的目标行为。控制原理如图13所示。
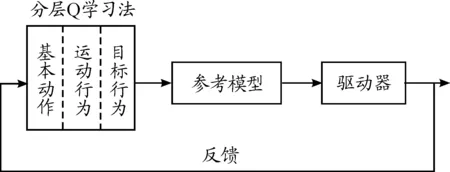
图13 分层Q-学习法控制原理框图
Elena[52]受到动物在外力干扰后步态调整方式的启发,提出了一个能最大限度提高动态能量稳定裕度的步态参数适应算法,并基于此算法设计了一个能够补偿稳定性变化的自适应控制器,从而使得机器人能够在面对外力干扰时做出稳定的反应,并将控制器应用于其研发的SILO4,实验表明机器人的移动速度提升了15%,对外力干扰的鲁棒性提高了70%。Uluc[5]提出了一个多点碰撞模型用于表征RHex的翻转运动,并基于此运动模型设计了一个自适应控制器。实验结果显示,机器人在泥土、沥青以及地毯上能够成功实现倾覆后的自动恢复。
4.3 仿生控制技术
仿生控制试图将生物控制理论应用于工程,通过模仿生物神经系统建立数学模型或进行工程模拟。中枢模式发生器(Central Pattern Generation,CPG)是生物控制和产生节律性运动的低级神经中枢。Wilson[53]指出CPG的活动既不依赖高级神经中枢的指令也不需要感觉反馈就能使生物体做出适应外界环境的活动。
Bernhard[54]提出了一种基于生物应激反应的运动控制方法。CPG根据外界刺激把基本运动库以及基本姿态库中一种或几种运动进行组合,形成目标运动模式。控制原理如图14所示。机器人可以在没有高级的运动规划和复杂的外部传感器的情况下穿越崎岖陡峭的地形。
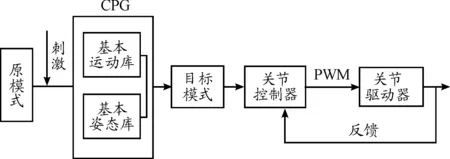
图14 CPG控制原理框图
Liu[55]将CPG用于四足机器人AIBO的运动控制,实现了机器人四种步态的平滑转换。WANG[56]提出了一种由CPG和工作空间轨迹规划器组成的四足机器人运动控制框架。利用CPG对不同步态产生不同的节律信号,轨迹规划器计算足部期望位置。这种运动控制框架兼具仿生控制和模型控制的优势,仿真结果表明了该方法的实用性和简单性。Espinal[57]提出了一种尖峰神经网络(spiking neural network,SNN)用于控制四足机器人运动。SNN作为一种CPG可以通过配置突触权重和拓扑结构等参数产生不同的运动模式,该系统已在两个机器人平台上进行了实现和验证。同样基于生物CPG,Liu[58]提出了一种由耦合振荡器组成的对称CPG结构,它可以生成稳定、自然的步态模式。通过引入旋转矩阵作为耦合项,实现了平稳快速的步态切换。此外,将机体姿态信息作为CPG网络的反馈进行传输,提高了系统在斜坡等不平坦地形中的适应性。仿真和实物样机试验结果验证了该控制策略的可行性。Szczencinski[59]基于昆虫神经系统自适应控制,考虑到控制28自由度的MantisBot各关节需要大量计算,为机器人设计了四种基本反射行为。该机器人可以通过神经网络控制系统产生的局部反射来实现机动,而无需进行步态规划或大量计算。Li[60]提出了一种采用通用内部模型(General Internal Models,GIMs)的学习方法。采用GIMs,仿生机器人可以学习和模仿动物运动。在蛇形机器人和鱼形机器人上的实验,验证了该方法的有效性。此外,Li指出GIM具有通用性,利用仿生神经网络可以学习任何类动物的运动模式。
5 机器人感知技术
随着视觉传感器技术的发展进步,足式移动机器人能够“看到”周围环境,有利于提高复杂路面上的避障、越障能力。
X-RHex[9]拥有良好的负载能力,能够搭载诸如GPS、激光雷达、网络摄像头、无线适配器等模块,具备在野外山地和室内楼梯间环境下对目标位置实现自主导航的能力,在军事侦察和城市搜救方面具有很大的实用价值。Scorpio[24]利用惯性测量单元能够在跌倒后自主恢复到站立步态并且能够通过感知地形选择合适的形态和运动方式。MANTIS[27]各条支腿的末端都搭载了丰富的传感器,头部搭载了立体摄像系统、惯性测量单元以及激光雷达传感器,机器人能够全方位地获取自身运动以及环境数据。
红外线、激光或超声波传感器常用于测量距离数据以识别路况,刘宇飞等[61]在用于月球探测的六足机器人上搭载激光测距仪,如图15(a)所示,基于测量信息对环境地形建模,进而规划运动轨迹实现自主避障。但是这种通过接受光信号或声音信号用于数字计算的方法容易受到周围环境的干扰不利于精确建模,进而限制机器人的移动能力。
另一种方案则是采用视觉传感器,通过处理摄像机捕捉到的图像数据,将其解释为机器人路径规划的有用信息。Acevedo[62]提出了一个新型的采用静态单目摄影机的全方位360度视觉系统来导航机器人移动。该系统由单目静态摄像机、凹面反射面和处理器单元以及机器人本体组成,如图15(b)所示。摄像机通过仰视凹面反射面的焦点可以360°全方位地观察机器人周围的环境。使用处理器单元进行图像处理,形成以机器人为中心的模拟环境。

图15 视觉传感器在机器人上的应用效果图
另一方面,双目视觉能够获得三维的场景信息,能够更好地感知环境。对此,宋海涛等[63]提出了一种双目立体视觉系统,通过引入尺度不变特性变换算法有效地解决了双目视觉的立体匹配问题。实验结果表明,搭载了该系统的移动机器人能够完成自动入库任务。
随着传感技术的发展进步,多足移动机器人实现了从模仿爬行动物的简单移动到拥有外界环境感知力和智能运动控制的跨越式发展。
6 足式爬行机器人发展趋势
在国内外学者的研究探索下,足式爬行机器人在机构设计与运动控制等方面都取得了长足的进展。足式爬行机器人已经能够实现在复杂地形上稳定行走,但机动性和灵活性远不如足式爬行生物,存在移动速度低,能量效率低等问题。结合以上对该领域研究成果的总结,本文预测未来足式爬行机器人的研究和发展将针对以下几个方面展开。
1) 运动机理仿生化。目前已经有很多学者研制了多种仿生足式爬行机器人,但是存在模型建立不够精确的问题。一方面,对足式爬行生物生理结构的深入揭示将给足式爬行机器人机构设计带来新的启发。另一方面,从爬行昆虫的运动控制中汲取灵感,在现有研究基础上进一步探索生物神经控制系统提高足式爬行机器人的运动精度和灵活性。
2) 能量利用高效化。搭载大容量的电池在提高机器人运行时间的同时降低了能量利用效率,因为额外的电池增加了机器人的负载。Aarom[64]通过调整机器人静止站立时机体的姿态优化了腿部关节的输出转矩,显著减小了站立姿态驱动器的输出功率。Hirone[65]通过优化机器人步长、跨宽、机体仰角、运动速度和足端输出力5个参数,有效地提高了机器人的能量效率。如何协调运动性能和能量损耗提高能量利用率是足式爬行机器人的发展趋势之一。
3) 结构材料新型化。新型材料的运用能进一步提高机器人的运动性能。例如,TITAN-XIII[10]采用超高分子量聚乙烯纤维制成的绞线在保证传动性能的前提下减轻了整机质量,有效地提高了机器人的比功率;X-RHex[5]机体框架使用表面覆盖碳纤维的铝板,在减轻质量的同时增加了框架刚度,机体更加轻巧坚固;德国人工智能中心在2016年研制的MANTIS[27]机身结构是由铸铝部件和用碳纤维加固的塑料管组成的。足式爬行机器人的结构材料将采用新型材料而不是钢材、塑料等传统材料,从而提高能量利用效率、增强环境适应性。
4)运动模式复合化。例如,TITAN-X[17]集履带、腿足于一体在复杂地形上有很强的通过性;Quattroped[18]采用结构可变的轮腿机构兼具轮式机器人的移动速度和足式机器人越障能力。多种运动模式的有效结合将全方位地提高机器人的运动能力。
5)感知技术多模化。视觉传感器和SLAM技术[66-67]的发展让机器人拥有“眼睛”成为现实。触觉可以提高机器人对外界的认知,增强对外界的交互性。现阶段机器人触觉的发展主要分为触觉传感器[68-70]和新型电子皮肤触觉传感器阵列[71-73]的研制,由于制作工艺、成本和能耗的问题尚未大面积应用于实践[74]。嗅觉[75]可以让机器人应用于灾害搜救、污染物排查等特殊领域[76-77]。多感官感知技术的融合或是足式爬行机器人智能化发展的方向。
7 结论
本文首先对近十年足式爬行机器人研究成果进行综述,分非仿生和仿生两类介绍若干足式爬行机器人结构与性能特点,并总结归纳了该领域的关键技术:机器人机构的创新设计,稳定性标定技术,爬行步态规划与运动控制以及视觉感知技术。随着该领域加入了越来越多的科研团队,足式爬行机器人的发展也是日新月异,未来的足式爬行机器人将实现运动机理仿生化、能量利用高效化、结构材料新型化、运动模式复合化和感知技术多模化。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
包装工程(2022年10期)2022-05-27
科学之谜(2018年4期)2018-09-17
Coco薇(2017年9期)2017-09-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
科普童话·百科探秘(2014年9期)2014-09-16
小朋友·快乐手工(2014年4期)2014-08-16