
基于ARM的永磁同步伺服电机驱动控制系统设计
2020-10-10 20:01吴璇
机电信息 2020年27期

摘要:以永磁同步电机(PMSM)伺服驱动控制方法為研究对象,设计一种PMSM驱动控制系统,采用STM32F407ZET6作为主控芯片,并设计了PMSM驱动控制系统的硬件电路和软件程序。对电机实体进行调试实验,证明了该驱动控制系统的可行性和实用性。
关键词:PMSM驱动控制;STM32F407ZET6;调试实验
0 引言
近年来,PMSM驱动控制系统逐渐趋于数字化实现,本文采用矢量控制策略和PID控制算法,在研究PMSM伺服驱动的控制原理基础上,初步设计出一种PMSM驱动控制系统。
1 PMSM的矢量控制系统模型
PMSM伺服系统是一个强耦合、非线性的复杂系统,需选择合适的控制策略来提高系统的控制效果,本文选择电流内环和速度外环的双闭环矢量控制策略[1]进行控制。
电流内环由PI进行控制,P环节主要是用来提高系统的响应速度,I环节则可减小系统的稳态误差。两路PI控制器分别以id和iq的偏差值为给定值,以udref和uqref为输出值。速度外环也采用PI进行控制。在速度环节中,位置检测装置通过光电编码器检测出PMSM转过的角度θ,再通过速度计算得出PMSM的角速度ωr,并以ωr的偏差值作为速度PI的输入值,以iqref为输出值。
2 系统硬件设计
该驱动控制系统的总体硬件结构包括ARM主控制器的最小系统电路、电机控制接口电路、电机驱动逆变电路、电源模块电路、电流采集电路和电机速度检测电路。
ARM主控制器最小系统电路主要有主控芯片的电源转换、复位电路、晶振电路以及下载和调试接口,电机矢量控制接口电路主要有电流反馈信号电路、编码器反馈信号电路和互补PWM输出电路。此外,在上述主要电路中还设计了保护电路,对PMSM驱动控制系统的过流、过压、欠压等情况进行保护,以防发生意外事件。
2.1 控制模块
STM32F407ZET6芯片[2-4]的高级定时器可以产生3对互补带死区的PWM波;GPIO口的外部中断可检测增量式编码器的反馈信息;ADC模块可以接收电流采集信号,FPU负责内部浮点数据处理,USART串口负责与上位机通信交互数据,因此符合PMSM驱动控制的需求。
2.2 驱动逆变模块
本系统的驱动逆变电路主要工作就是驱动PMSM正常运转,包括逆变电路和驱动电路。其中,驱动电路负责将主控芯片发出的6路PWM控制信号进行驱动放大,逆变电路则在该信号的控制下将直流母线电压逆变成三相正弦波,为PMSM供电。逆变电路采用的是比较经典的三相桥式逆变电路,功率开关元件选择IGBT管,驱动电路则采用了驱动模块IR2136。
2.3 编码器信号处理电路
选用的伺服电机同轴安装有增量式光电编码器[5],可作为PMSM的位置传感器来检测其转子的转角和转速。在PMSM转动过程中,编码器会输出A、B、Z三组差分信号,该信号需经过信号处理电路处理后再送给主控制器进行电机转子转速的检测。
2.4 电流采样处理电路
本文采用两个霍尔电流传感器Honeywell CSNE151-100分别对A、B两相进行电流采样,其工作电压为+15 V,可接收PMSM的单相电流信号,输出-5~+5 V的电压信号,再送至主控制器的ADC模块进行数据采集。
3 系统实验开发平台
本文设计的伺服系统所采用的PMSM为南京东豪电机技术有限公司的110DH-A06020H,其电机参数如下:额定转速2 000 r/min;额定电压/电流AC220 V/6 A;转子惯量1.0×10-3 kg·m2;转子磁链0.33 Wb;定子电感0.5 mH;极对数为2。由电机手册资料可知,取Kp=112,Ki=54。由此可计算出PMSM的速度传递函数为:
Gω(s)= (1)
式(1)为速度PI控制的被控对象。PMSM驱动控制的实验平台如图1所示。
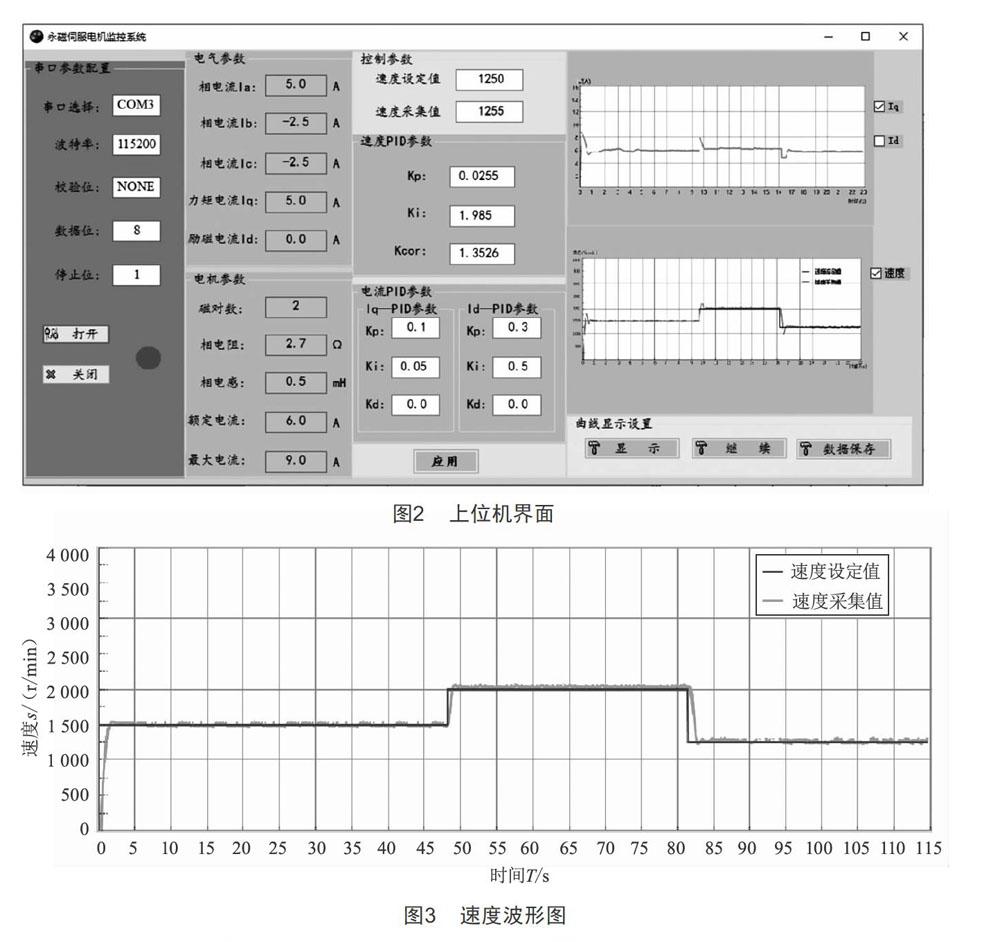
本文设计了一种简单的上位机监控界面,用来与主控制器互通信息,实现数据交流。该上位机以PC机作为主机,在Visual Studio 2012集成开发环境[6]下的Windows窗体中绘制系统界面和编写应用程序,通过串口与下位机即主控制器进行通信。界面图形如图2所示。
本文实验中所用电机的额定转速为1 500 r/min,上位机界面可实时显示电机速度的波形图,如图3所示。
其中,黑线为电机速度设定值,灰线为速度实际值。开始时,通过上位机监测界面将速度值设定为1 500 r/min;在t=48 s时,速度增加至2 000 r/min;在t=82 s时,速度降低至1 250 r/min。由图3可知,系统开始工作后,电机转速迅速上升至1 500 r/min,且无超调,t=2 s后,系统开始稳定运行,即调节时间为2 s。在速度增加或降低时,系统均能快速反应并稳定运行。
4 结语
本文所设计的PMSM驱动控制系统采用了STM32F407ZET6做主控器,设计了相关的硬件模块和软件控制模块。实验结果表明,该系统能够实现伺服电机的稳定运行,且性能良好,具有一定的实用性和创新性。
[参考文献]
[1] 张燕红,王磊,吴璇,等.基于ARM的高性能交流伺服电机系统设计[J].微特电机,2018,46(5):14-17.
[2] 曾成.基于STM32的直驱式自动门控制策略研究[D].南京:东南大学,2019.
[3] 彭刚,秦志强.基于ARM Cortex-
M3的STM32系列嵌入式微控制器应用实践[M].北京:电子工业出版社,2011.
[4] 张瑞,田永全,赵阳,等.基于STM32微控制器稳定平台数字控制系统的设计[J].弹箭与制导学报,2020(6):1-4.
[5] 刘朝阳.基于增量式光电编码器的自动扶梯多参数测试仪研究[D].重庆:重庆大学,2014.
[6] 吴璇.基于ARM的永磁同步伺服电机驱动控制的研究[D].南通:南通大学,2018.
收稿日期:2020-07-27
作者简介:吴璇(1992—),女,江苏徐州人,硕士,助理讲师,研究方向:智能控制。
猜你喜欢
中国自行车(2022年3期)2022-06-30
当代化工(2020年4期)2020-08-24
发明与创新·中学生(2020年1期)2020-08-03
信息技术时代·上旬刊(2019年4期)2019-09-10
网络空间安全(2019年8期)2019-03-18
发明与创新·小学生(2018年7期)2018-08-06
科学与财富(2018年34期)2018-01-15
科技与创新(2017年5期)2017-03-28
科技传播(2012年10期)2012-06-06
电子设计应用(2004年6期)2004-07-27
