基于YCbCr和Hough变换圆的林区原木运输车辆识别
2020-10-10 01:45:18张小娟王长缨潘晓文
林业资源管理 2020年4期
程 丽,万 星,张小娟,王长缨,潘晓文
(福建农林大学计算机与信息学院,福州 350002)
随着视频监控的日益普及,监控设备被普遍安置于各大林区道路,用来监控管理木材运输。对于大量的林业道路监控视频数据,通过人工标定视频中车辆违法运输的异常行为来获取信息的方法费时费力,泛化能力有限且没有针对性[1]。因此,为了及时有效地处理大量的视频信息,就需要应用视频分析技术和计算机视觉理论,对林区道路监控视频中的车辆行为进行有效的识别分析[2]。
车辆识别包括车牌识别、车型识别、车辆违章识别等[3-7],但由于背景复杂、光照变化、车辆类型多样等因素,使得从视频中识别运输车辆的准确性较差。针对这个问题,Tsai等[8]采用新型的颜色变换模型使得候选车辆能被快速找到,多通道分类器被边缘图的小波变换系数所构建,从而验证了所有的候选车辆。该方法将全局颜色特征和局部边缘特征进行融合,消除了大部分无用的背景像素,但构造特征集和分类器的过程非常复杂且耗时。Jazayeri等[9]将车辆的动态信息与临时的底层几何特征时间信息结合,从而检测出了视频流中的车辆目标,并建立隐尔马可夫模型区分出了目标车辆。该方法解决了复杂背景和光照变化对车载摄像机的影响,但车辆在垂直面上的尺寸较小,使其很难检测远距离车辆。近年来,车辆识别的探索和研究在某些应用场景下已经取得了较好的效果,但在类别多样复杂的林区场景下,对那些运输成捆的裸露在外的原木车辆进行识别具有一定的挑战性。
1 车辆识别
原木运输车辆的识别包含提取目标特征和检测原木两个重要步骤。常用的图像特征有颜色特征、形状特征、空间关系特征等,每个特征类型又由许多子特征类型构成。
在特征提取方面,Wang等[10]采用主成分分析(PCA)、独立成分分析(ICA)考虑子区域的位置信息等,对图像进行特征提取,提出了4种不同的用于车辆检测的模型。通过验证发现,结合PCA和ICA的特征提取方法来提取特征进行车辆检测的效果最好,即通过PCA模拟低频信息,通过ICA模拟残留空间中的高频信息。Shang等[11]利用局部颜色和灰度直方图以及一阶和二阶统计量,定义每个单独像素的特征向量,然后,基于模糊粗糙集对特征向量进行特征选择,对于选取的特征用SVM进行分类学习从而对火星图像识别分类。Sombatpiboonporn等[12]发现梯度主要集中存在于边缘区域,局部目标的梯度方向密度或边缘方向密度的统计信息能较好表示车辆的表观信息,因此,提出了方向直方图梯度(HOG,Histogram of Oriented Gradient)特征。
在原木检测方面,原木属于类圆目标,原木的边缘是相交圆,或者轮廓本身存在干扰和变形。现有的原木检测方法大致可分为两类:(1) 曲线拟合方法(Curve Fitting),(2)基于霍夫变换(Hough Transform)的方法。在边缘提取图像时,若要求高精度则使用曲线拟合的方法,以减少提取圆边缘模糊时的误差。1988年,Hough变换被Kittler等[13]提出,Hough变换具有识别率高、抗噪性强、鲁棒性较好、识别率较高等优势,可用于检测图像空间中的任意解析曲线;景林等[14]将原木端面的色彩特征与拉普拉斯滤波器相结合,获得了较好的原木边缘。该算法能较好地分离出原木、天空和绿树等颜色差异大的背景,但分离地面背景的效果较差;陈广华等[15]采用双目立体视觉及图像分割对成捆原木自动化检原木端面径级进行快速三维测量,并精确分割了原木端面与背景;杨泽灿等[16]采用基于K-means聚类分割与Hough算法对原木边缘进行判断,潜在类圆心参数和原木边缘被二维数组验证,该算法减少了无效采样的检测,但仍然存在部分未被正确识别的原木。
针对这些问题,本文提出将YCbCr颜色特征和Hough变换圆相结合,以识别林区原木运输车辆。首先,利用亮度和颜色特征初步分割图像,图像经YCbCr空间预处理后则背景干扰被去除;然后,再将图像转换回RGB空间。针对图像分割后,各个原木之间的空隙使用形态学统一去除。使用开闭运算去除图像中一些可能存在的小洞,过滤掉干扰像素,减少无效像素点。林区木材运输车辆在Hough变换下就被识别出来了。
2 林区木材运输车辆识别算法
采用YCbCr颜色特征和Hough变换圆检测识别林区木材运输车辆的算法流程如图1所示,图像经过YCbCr颜色空间转换后获得二值化图像,再进行Hough变换圆检测。
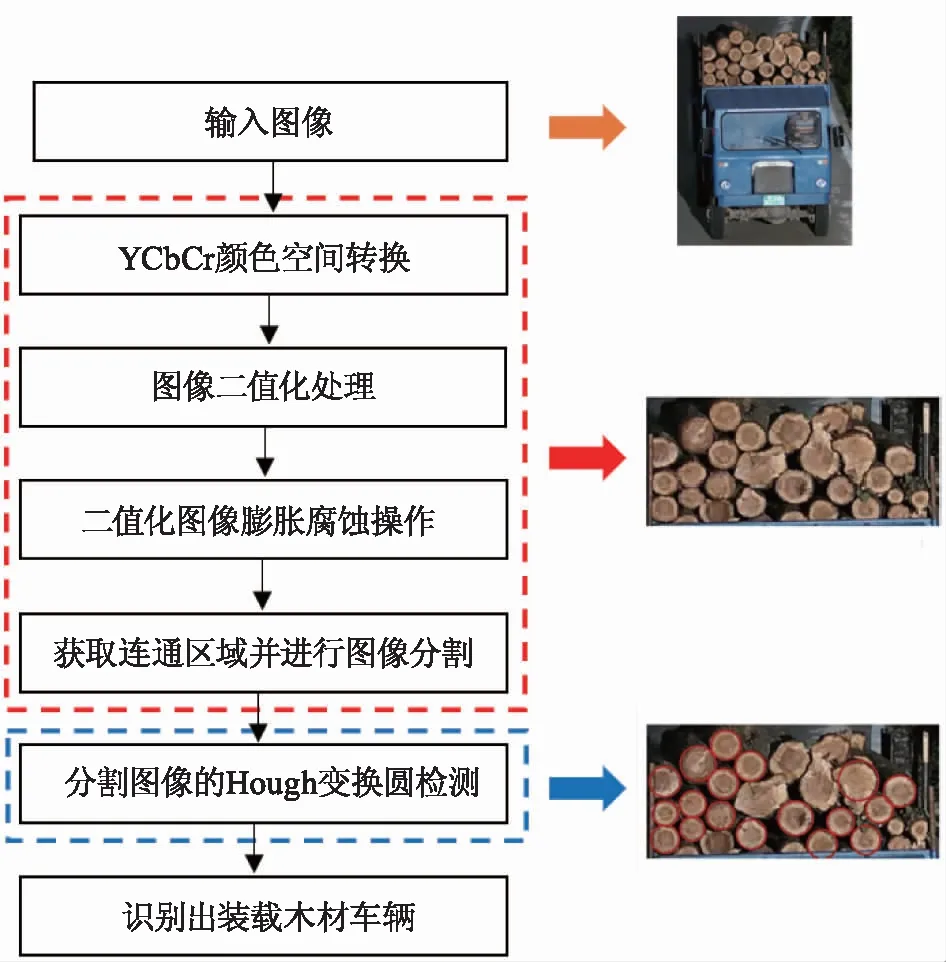
图1 算法流程图Fig.1 Diagram of the algorithm
2.2 颜色特征空间
作为一种数学描述的颜色空间,它包含3个相对独立的信息分量,其分量坐标的每个点由3个代表某一特定的颜色的分量值构成。颜色识别算法一般都是将图像从RGB颜色空间转换到更易于特征提取和识别的彩色空间,再基于特定的颜色空间,采用合适的识别算法,进行后续的识别分析。
2.1.1YCbCr颜色空间
作为一种颜色表示格式的YCbCr颜色空间被广泛应用于数字视频[17]、视频压缩编码(JPEG,MPEG等标准)、人脸识别和运动目标检测等领域。YCbCr颜色空间中包含了亮度信息Y,蓝色分量Cb,红色分量Cr,空间色彩信息Cb和Cr。从YCbCr颜色空间转换为RGB颜色空间的线性转化公式为:

(1)
YCbCr颜色空间中的3个分量相互独立,即Y分量,Cb,Cr彼此不依赖,因此,色彩中的亮度信息能被分离出来。
2.1.2基于YCbCr颜色特征的车辆木材区域图像分割
虽然原木端面的颜色会受到光照、原木的湿度的影响,但是同一捆原木端面的颜色差异不大,且背景相同,从而使得去除原木图像背景像素的问题可以转化为提取原木区域的问题。
采用基于颜色特征的图像来分割本文林区木材运输车辆图像的过程和算法较简单,实时性较好。由于YCbCr颜色空间中色度分量和亮度分量彼此不依赖,而YCbCr颜色空间与RGB颜色空间存在线性变换关系且相互转换较为简单,因此,本研究提出将YCbCr颜色空间特征用于分割车辆木材区域,该算法步骤如下:
步骤1,图像由RGB空间转换到YCbCr空间,得到了图像的YCbCr色彩空间。
步骤2,Y,Cb,Cr3个分量的二值化的阈值上限被确定为Ymax,Cbmax,Crmax和阈值下限Ymin,Cbmin,Crmin,处理后的二值化图像为:
(2)
(3)
(4)
式中:FY(x,y)为像素点(x,y)在Y分量的像素值,FCb(x,y) 为像素点(x,y)在Cb分量的像素值,FCr(x,y)为像素点(x,y)在Cr分量的像素值。根据上述公式可以得到二值化图像。为了更好地确定二值化图像的阈值,需要研究木材像素在YCbCr的色彩空间的分布规律,对木材运输车辆进行Y,Cb,Cr3个分量的分离,具体情况如图2所示。根据对木材区域的Cr分量和Cb分量的研究以及实验分析,设定Ymax=255,Cbmax=127,Crmax=170;Ymin=0,Cbmin=100,Crmin=138。
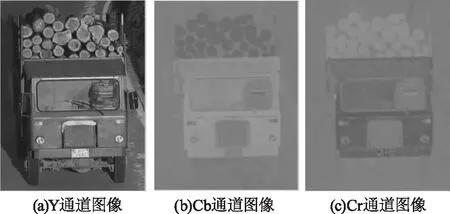
图2 分割后的木材通道图像Fig.2 Channel image after segmentation
步骤3,由于原木堆放不规范、大小不等、长短不一,长的原木会挡住短的原木的光线,导致短的原木的部分端面或者全部端面位于长的原木的阴影之中,造成部分原木端面光线不均匀。为了有效分割识别目标,分别对二值化图像进行腐蚀、孔洞填充、膨胀等形态学处理。
步骤4,提取经过步骤3处理后的连通区域图像,即,将木材区域有效分割出来,未分割时如图3所示,图4为分割后的木材图像。从图3和图4可知,此方法能够较完整地将运输木材车辆装载木材区域识别出来。

图3 未分割的木材运输车辆Fig.3 Original image of log transport vehicle
图4 分割后的木材区域Fig.4 Log image after segmentation
2.2 基于Hough变换的圆检测
由于原木嵌套关系在实际中的原木端面不存在,因此,只需要寻找到类圆的圆心来识别原木端面,圆心的信息就被记录在二维空间的累加器数组中。由先验知识得出的判据为:1) 若圆心点在二值化图像中取值为l,则圆心点为物体上的点;2) 边缘点不是圆心点;3) 圆心点到图像边界的距离应大于可能出现的最小半径值,使得所取图像包括原木捆横截面的全部;4) 识别出的圆内不包含其它圆的圆心,原木端面图像只可能出现部分重叠。
利用YCbCr颜色特征来识别并分割感兴趣区域,Hough圆变换检测分割出来的感兴趣区域,如果分割区域能检测出若干个圆形,那么就可以认为此区域为木材,该车辆为装载木材的车辆。通常,Hough变换(Hough Tansform)检测被用于一定函数关系描述的曲线中,如,图像中直线、抛物线、圆、椭圆等形状。
目前,Hough变换已经成功地应用于图像识别,影像分析等领域。它将图像空间中的曲线或者直线转换到参数空间中,每一个三元组(a,b,r)可根据图像中的点而求出并累加P,从而得到参数空间中的三维累加数组P(a,b,r)。圆心为(a,b),圆的半径为r,则满足空间坐标系中圆形的方程为:
(a-x)2+(b-y)2=r2
(5)
式中:(x,y)为圆上任意一点。圆由圆的半径和圆心坐标而确定,即唯一确定一个圆则需要3个参数a,b,r,其映射关系如图5所示。具体可以表述为:图5中(a)图像空间中圆上所有的点由Hough变换后映射为(b)参数空间中的三维锥面,使得(a)中圆上所有点对应的三维锥面在(b)中都有3个参数交点。其基本步骤为:
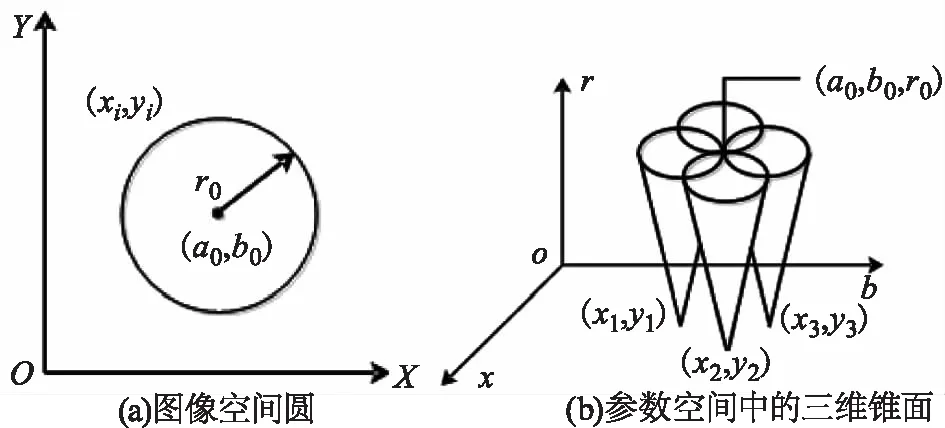
图5 三维锥面映射示意图Fig.5 3D cone map
步骤1,对检测图像灰度化处理,并且进行边缘点检测。
步骤2,在3个参数a,b,r中分别获取其最大值和最小值来建立三维参数空间。
步骤3,在建立的三维参数空间中建立累加器P(a,b,r),其中的元素都设置为0。
步骤4,计算图像中每个边缘点得到参数(a*,b*,r*),三维累加数组P(a*,b*,r*)的数值加1。
步骤5,确定圆心以及半径参数,是通过图像平面累加器的局部最大值来找出的。
2.1.2车辆识别结果标准
为了对林区木材运输车辆识别结果质量进行评估,本文采用5个指标来衡量,分别为:查全率(Recall)、特异性(Specificity)、正确分类比例(PCC)、查准率(Precision)、F值(F-Measure)。运输木材车辆数据集为正样本,非运输木材车辆数据集为负样本。TP为真阳性;TN为真阴性;FP假阳性,表示负样本被分类为正样本;FN假阴性,表示正样本被分类为负样本。
正确分类比例被广泛使用在计算机视觉领域,目的是评估一个二值分类器性能,表达式如下所示:
(6)
查全率表示正确判定为正样本的样本占全部正样本的比值;查准率表示正确判定为正样本的样本占所有被检测为正样本的比例,查准率与查全率互相矛盾,成反比关系。
(7)
(8)
其中,本文还采用F-Measure和Specificity两个精度指标,具体公式如下:
(9)
(10)
3 实验结果分析
实验的数据来源于林业监管部门的林区道路卡口监控的视频图像,770张装载原木的车辆图片(正样本),734张非运输木材车辆数据集(负样本)。
本文先利用YCbCr颜色特征分割林区道路视频中的车辆图像,再利用Hough变换圆对分割的区域进行检测,主要解决了原木生产作业现场获取的成捆原木的端面形状不规则,类圆程度不同等困难。因此,本文设定检测类圆的阈值num=3,当类圆个数大于等于阈值时,则认为该区域存在木材,即该车为运输木材车辆。实验测试结果如表1和图6所示。

表1 识别算法的实验结果Tab.1 Experimental results of the algorithm
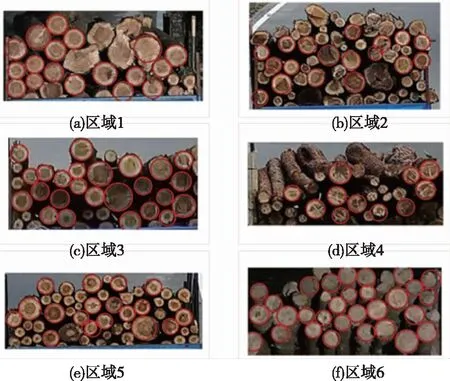
图6 分割区域的圆检测Fig.6 Circle detection of the segmented region
从表1中可以看出,该算法的识别结果评价指标PCC,Recall,Precision,F-Measure,Specificity都能达到70%以上,识别效果较好。由图6可知,由Hough变换圆对分割出来的木材区域进行检测,能识别出部分木材,而无法识别的部分是不太符合圆形的木材。
4 总结
本文识别了林区道路卡口监控视频图像中的原木运输车辆,将基于YCbCr颜色特征和Hough变换圆检测相结合来识别原木运输车辆。该方法利用RGB与YCbCr颜色空间相互转换来获得具有颜色特征的感兴趣区域,Hough变换圆对该区域进行检测,判断车辆是否载有木材。该算法用于林区道路车辆图片数据集进行实验分析,结果表明,研究方法能较好地识别出原木运输车辆。但本研究仍然存在未识别的原木运输车辆,在以后的研究中仍需进一步改进算法,获得更好的原木运输车辆识别效果。
猜你喜欢
建筑与预算(2024年2期)2024-03-22 06:51:36
大自然探索(2024年1期)2024-02-29 09:10:32
设备管理与维修(2022年21期)2022-12-28 07:34:02
军事文摘(2021年16期)2021-11-05 08:49:06
电镀与环保(2017年6期)2018-01-30 08:33:37
国际木业(2016年8期)2017-01-15 13:55:21
国际木业(2016年3期)2016-12-01 05:04:51
幸福(2016年9期)2016-12-01 03:08:42
设备管理与维修(2016年6期)2016-03-16 02:21:54
国际木业(2016年12期)2016-03-10 16:10:00