
基于KCF的多条件综合判断行人跌倒检测方法
2020-10-09 10:16谢辉贾海晨冒美娟陈瑞
物联网技术 2020年9期
谢辉 贾海晨 冒美娟 陈瑞


摘 要:面对逐渐增多的空巢老人,为了防止他们在家中意外跌倒而导致残疾甚至死亡,文中提出了一种基于KCF跟踪算法的多条件综合判断行人跌倒检测方法。此方法根据HOG特征和支持向量机算法进行行人检测,以矩形区域框出行人的身体特征区域,再对检测到的行人根据KCF跟踪算法进行持续跟踪,同时利用矩形的一对对角来进行加速度、角度、高度差在一段时间内的计算判断,检测行人是否跌倒。实验结果表明,此方法能够很好地进行行人检测跟踪以及跌倒判断,具有较高的准确率,能达到较好的检测效果。
关键词:KCF;目标检测;目标跟踪;HOG特征;OpenCV;SVM
中图分类号:TP391.41文献标识码:A文章编号:2095-1302(2020)09-00-04
0 引 言
如今社会中空巢老人的数量逐步增多,老人发生跌倒的概率也相应增加,逐渐引起人们的关注。目前主要通过行人跌倒自动检测系统预防老人跌倒后无法得到及时救护,其主要分为基于可穿戴装置的系统,基于场景设备的系统以及基于计算机视觉的跌倒自动检测系统。
基于可穿戴装置的跌倒自动检测系统通过穿戴具有加速度传感器的设备来检测判断老人是否跌倒。此方法需要老人一直穿戴该设备,导致设备容易损坏,出现误报,而且长期穿带此设备会影响日常生活,大多数老人对此类装置具有一定排斥心理,不愿佩戴。
基于场景设备的跌倒自动检测系统将人体运动的信息通过安装在特定场景下的多个传感器设备收集,再对这些数据进行分析,判断是否发生跌倒事件。虽然此类方法不影响老人正常生活,且准确率高,但此类设备费用较高,难以推广。
基于计算机视觉的跌倒自动检测系统通过图像处理技术对人体形状特征和运动进行分析来检测跌倒事件。这种方法因为成本低、受干扰小,可同时检测多个跌倒事件,因此受到广泛关注和使用。但目前提出的跌倒检测算法在坏境影响、目标跟踪、误判率和准确率等方面还存在不足,因此本文提出了一种基于KCF的多条件综合判断行人跌倒检测方法[1]。
1 跌倒检测方案
人体是否跌倒一般通过视觉对人体的运动变换和形态特征进行判断。对于运动变换,老人行动缓慢,其运动变化普遍较慢,而当发生跌倒事件时其行动会发生急速变换。对于形态特征而言,当人跌倒时其质心会低于一定高度。本文提出的检测系统基于这两个关键条件进行判断。系统首先对视频进行行人检测,接着对检测到的目标进行跟踪,最后基于上述两个条件进行跌倒判断。在检测和跟踪的过程中,如果检测到行人后开始跟踪,并停止检测;如果目标丢失,则检测标记为真,重新进行检测,不再跟踪,以便提高程序运行效率以及准确率。程序整体流程如图1所示。
1.1 行人检测
在进行行人跌倒检测之前首先需要锁定目标,排除其他物体的干扰,因此采用视频分析中的重要技术—目标检测提取特征并分类,检测出运动的物体。运动目标检测不但为跌倒检测提供了基础,而且可为后续特征提取减少干扰、提高效率,保证特征信息提取的准确性。目前目标检测的主流算法有如下几种。
(1)光流法。光流法是图像在平移过程中的二维矢量场,通过计算每个像素点的速度矢量来表示物体点三维运动的速度场,然后对此进行分析,确定图像像素点上的运动方向和运动速率。这种方法最大的优点是在摄像头不断改变位置的情况下也可以检测到运动前景,虽然光流法无需提前知道场景信息,但容易受光线等因素的变化而影响,并且计算量大,实时性差。
(2)帧间差分法。由于场景的目标在运动,因此目标图像在不同图像帧中的位置不同,可对时间相邻的两帧或三帧图像进行差分运算。当得到的灰度差的绝对值超过阈值时则表示前景,低于阈值时则表示背景。设t时刻获得的帧像素值为It(x),则其前一帧图像像素值为It-1(x),将t时刻和t-1时刻像素的帧差记为ΔIt(x),其表达式如下:
式中:T(x)为像素阈值,当Dt(x)=255时,表示为前景;当Dt(x)=0时,表示为背景。虽然帧间差分法计算复杂度低,能够实时检测,但此算法如果阈值设定不完美会存在无法过滤噪声或忽略前景像素点的可能,只适用于摄像头静止情况下的动态目标检测。
(3)背景建模法。此算法是对一段视频中运动区域进行背景建模的过程,得到静态区域后将背景模型和当前帧图像进行比较,减去已知的背景从而获得前景。该算法较上述两种算法更易实现、检测结果完整良好、能够实时检测处理。 目前在背景建模中高斯模型被广泛应用,但单高斯背景模型仅在简单场景中能够取得较好结果,而行人跌倒检测的环境更为复杂,环境容易发生突变,导致背景像素值呈多峰分布,故單高斯背景模型不再适用。Stauffer[1]等在单高斯背景模型的基础上,首次提出了混合高斯背景模型(GMM),这种模型对背景的自适应性强,使得算法鲁棒性更强。
本系统设计了基于混合高斯背景模型并结合梯度方向直方图(HOG)以及支持向量机(SVM)的行人检测模型[2],可快速准确地进行行人检测识别。首先,通过高斯混合模型对视频提取前景;然后,对前景进行连通域去噪等处理,得到运动目标区域;最后,使用HOG特征和SVM分类器进行行人检测识别。其中混合高斯前景分割的步骤最为关键,Stauffer等在1999年提出的GMM公式理论如下:
式中:α为权重更新学习率;ρ=α/ωi, t为参数更新学习率。当t时刻图像的像素值符合|xt-μi, t-1|≤2.5si, t-1时,xt匹配第i个高斯分布,Mi, t取1;反之,Mi, t取0。如果某个xt不能匹配所有的高斯分布,就把该xt当作新的前景点,并将权值最小的高斯分布用新的高斯分布替换,再用较小的ω和较大的s2进行初始化[2]。
1.2 目标跟踪
目标跟踪技术是计算机视觉领域中最为关键的步骤之一,也是后续进一步处理视频内容的基础。其通过算法产生运动模型,对每一帧图像中目标的检测结果匹配运动模型的目标轨迹,再通过预测之后的位置来更新模型。运动目标的有效跟踪是跌倒检测的基础,对于跌倒检测系统而言,运动目标跟踪的准确性和完整性起到了至关重要的作用。
生成式跟踪方法和判别式跟踪方法是目前主流的两种跟踪算法。其中,判别式跟踪方法将跟踪问题等同于一个分类问题,利用SVM分类器进行跟踪目标与背景的分离,因此判别式跟踪方法处理速度快,同时还将目标和背景信息考虑在内,在目标跟踪算法中被广泛使用。经典核相关滤波(KCF)[3]
目标跟踪算法是判别式跟踪算法中效果最好的一种跟踪算法。在Henriques[4]等提出的核循环结构(CSK)运动目标跟踪算法基础上,KCF算法加入了多通道HOG特征来代替单通道原始像素特征,提升了跟踪性能。
KCF算法的基本原理实质是求解岭回归问题。假设一个训练样本集D(xi, yi)中存放有大量通过循环位移得到的训练样本,那么该训练样本集D的线性回归函数为:
1.3 跌倒判断
在对摔倒检测过程中,需要先对已经跟踪好的运动人体目标进行特征提取,从而降低维度,减少数据冗余,同时保留人体关键信息,保证跌倒检测识别更加准确,具有实时性。为了实现选取最少的特征来有效区分不同图像类别的目的,对于运动人体的特征选择,考虑到正常走动时人体质心基本保持较高平衡,当摔倒和蹲下时较低,且跌倒时瞬时速度会突然增大等因素,该系统选择人体质心的加速度、角速度以及相对高度作为特征依据进行判断,三者不仅具有较强的独立性,符合综合判断的条件,还可避免因选择的特征向量过多,而导致特征向量空间维度更高、分类器设计复杂、系统实时性更差[4-5]。
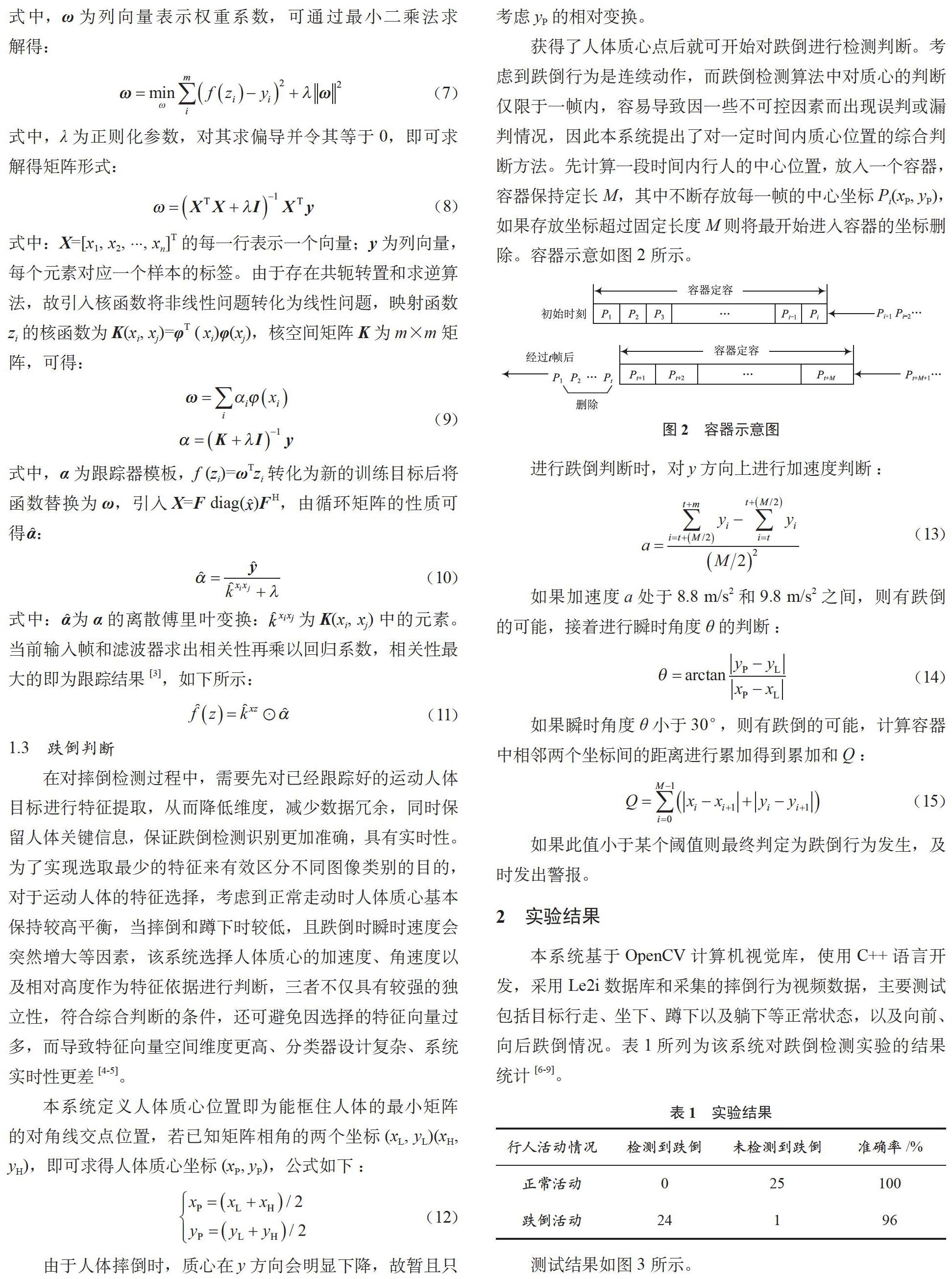
获得了人体质心点后就可开始对跌倒进行检测判断。考虑到跌倒行为是连续动作,而跌倒检测算法中对质心的判断仅限于一帧内,容易导致因一些不可控因素而出现误判或漏判情况,因此本系统提出了对一定时间内质心位置的综合判断方法。先计算一段时间内行人的中心位置,放入一个容器,容器保持定长M,其中不断存放每一帧的中心坐标Pi(xP, yP),如果存放坐标超过固定长度M则将最开始进入容器的坐标删除。容器示意如图2所示。
2 实验结果
本系统基于OpenCV计算机视觉库,使用C++语言开发,采用Le2i数据库和采集的摔倒行为视频数据,主要测试包括目标行走、坐下、蹲下以及躺下等正常状态,以及向前、向后跌倒情况。表1所列为该系统对跌倒检测实验的结果统计[6-9]。
测试结果如图3所示。
3 结 语
本文提出的基于KCF的多条件综合判断行人跌倒检测方法能够实时检测行人,并对多目标进行跟踪,虽然存在一定(1 s以内)延迟,但经比较发现,此系统极大地提高了跌倒判断的准确率。
参考文献
[1] STAUFFER C,GRIMSON WEL. Adaptive background mixture models for real-time tracking [C]// 1999 IEEE Computer Society Conference on Computer Vision and Pattern Recognition,1999.
[2]龚露鸣,徐美华,刘冬军,等.基于混合高斯和HOG+SVM的行人检测模型[J].上海大学学报(自然科学版),2018,24(3):341-351.
[3]成科扬,师文喜,周博文,等.面向复杂场景的鲁棒KCF行人跟踪方法[J].南京航空航天大学学报,2019(5):625-635.
[4] HENRIQUES J F,CASEIRO R,MARTINS P,et al. Exploiting the circulant structure of tracking by detection with kernels [C]// European Conferenceon Computer Vision. Berlin,Heidelberg:Springer,2012.
[5]蘇松志,李绍滋,陈淑媛,等.行人检测技术综述[J].电子学报,2012,40(4):814-820.
[6]吴晓阳.基于OpenCV的运动目标检测与跟踪[D].杭州:浙江大学,2008.
[7]袁杰. 基于视觉的老人跌倒检测系统设计与研究[D].赣州:江西理工大学,2018.
[8] Muhammad Mubashir,Ling Shao,Luke Seed.A survey on fall detection:principles and approaches [J]. Neurocomputing,2013:144-152.
[9] HENRIQUES J F,CASEIRO R,MARTINS P,et al. High speed tracking with kernelized correlationfilters [J]. IEEE transactions on pattern analysis and machine intelligence,2015,37(3):583-596.
[10]禹明娟.基于视频的室内老人摔倒检测研究[D].杭州:杭州电子科技大学,2016.
[11] Subhransu Maji,Alexander C Berg,Jitendra Malik. Efficient classification for additive kernel SVMs [J]. IEEE transactions on pattern analysis and machine intelligence,2013,35(1):66-77.
[12] Lu Chen,Yanhua Shao,Yanying Mei,et al. Using KCF and face recognition for outdoor target tracking UAV [C]// International Conference on Graphic and Image Processing,2019.
[13] Mika?l A Mousse,Cina Motamed,Eugène C Ezin. Percentage of human-occupied areas for fall detection from two views [J]. The visual computer,2017,33(12):1529-1540.
猜你喜欢
科技创新与应用(2016年36期)2017-02-21
科学与财富(2016年28期)2016-10-14
现代电子技术(2015年18期)2015-09-16
