基于MEMS 加速度计空投浮标的波浪测量方法试验研究
2020-10-09 07:42魏晓辉
海洋科学 2020年9期
刘 宁, 魏晓辉, 王 斌, 董 涛
(国家海洋技术中心, 天津 300110)
针对基于加速度传感器的波浪测量浮标, 加速度信号的积分算法直接影响波浪测量的准确性, 不经处理在时域内直接进行二次积分所获得的位移结果, 即波浪高度, 会存在严重的低频噪声, 导致结果错误。由于MEMS 加速度传感器的误差会随着时间的推移而放大和传播, 所以对其输出加速度进行精确的积分是目前的难点。目前, 有许多积分方法可以将加速度较为准确地转化为成位移, 分为时域积分算法和频域积分算法两类[4]。 应用比较广泛的是频域积分和数字滤波, 通过去除传感器的低频噪声来减小误差[5-6], 这种方法基于离散傅里叶变换(DFT),将低于截止频率的信号归零, 以避免积分误差的影响[7], 然而, 这种积分方法容易丢失有效数据。对于高通滤波算法和滑动平均算法, 试验表明后者结果更加准确[8], 但试验工况较少, 试验时间较短, 且传感器仅仅搭载在一个简易的漂浮物上, 势必造成实际应用中浮标测量结果误差较大。为了解决这个问题, 李明珠团队在微小位移测量算法的研究中[9], 在频域积分中控制低于截止频率的信号衰减程度, 可以避免有效数据被去除。本文根据频域衰减积分算法, 对MEMS 加速度传感器的测量结果依次进行加速度竖向处理、频域积分、时域积分、三次曲线拟合与插值处理, 提出一种适合空投波浪测量浮标测波的算法。在多功能水槽模拟试验中, 采用了10 中不同波高与周期的工况, 验证应用该算法浮标的测波性能, 同时检验该新型浮标的设计是否成功, 结果显示浮标的测波准确度能够达到测波标准, 为波浪浮标的设计与测波算法提供新的思路。

图1 波浪测量算法计算流程Fig. 1 Procedure of calculations for the new wave measurement method
1 波浪测量方法
由于浮标在海浪中会发生橫摇, 加速度传感器所标定的Z坐标不能保持竖直向上, 故需要先计算浮标竖直方向加速度, 然后通过频域积分算法、时域积分算法获得浮标的竖向位移。由于MEMS 加速度传感器的采样频率只有4 Hz, 而且初始条件是未知的, 因此选取中间部分足够周期数量的浮标竖向位移数据, 进行三次曲线拟合处理和三次样曲线插值处理[10]获得最终的波浪数据, 如图1 所示。
1.1 竖直方向加速度计算算法
由于MEMS 加速度计是惯性器件, 可通过姿态角与坐标换算获得浮标沿竖直方向的加速度[11]。设定参考坐标系为O–XrYrZr, 当前坐标系为O–XcYcZc,如图2 所示。其中当前坐标系是加速度传感器此时的坐标系, 而参考坐标系是地面坐标系, 两者的变换基于以下顺序: 首先绕X轴旋转θ角度, 然后绕Y轴旋转γ角度, 最后绕Z轴旋转φ角度。变换矩阵为:


图2 参考坐标系与当前坐标系Fig. 2 Reference coordinate and current coordinate
浮标任意时刻的加速度可以表示如式(2),ax,ay,az为当前坐标系的加速度,Ax,Ay,Az为参考坐标系的加速度。
1.2 积分算法与后处理
浮标的加速度传感器的采样频率为4 Hz, 在T时间长度里, 测试得到长度为4T的离散加速度数列ar(n), 然后进行离散傅里叶变换(DFT)获得变换后的频域内复数序列ar(m)以及对应的频率fm:
式中,f0为采样频率。
为了控制低频段的噪声, 需要引入控制函数φv(ωm)[5,12], 函数中设定一个截止频率fT, 一定程度地减小低于fT加速度信号的幅值。利用最小二乘法控制积分误差, 设计加速度与速度之间转换的目标函数为[12]:
[9]杨春梅、郑岩:《财税政策与企业技术创新:基于吉林省的实证分析》,《社会科学战线》2012年第7期。

式中,β为正则化系数。式(5)的前一项用于控制积分过程对加速度的接近程度, 后一项则引入正则化系数β来控制积分趋势项。对式(5)求导如下:
引入积分精度αT和低频截止频率fT[13]表示正则化系数β, 得到频域积分的控制函数[9,14]:

其中, F–1表示离散傅里叶逆变换。
获得速度信号v(n)后, 对其进行时域上的积分处理得到位移信号为:

为了使浮标位移曲线的平衡位置与x坐标轴重合, 对位移数据进行三次曲线处理[15]。假设存在三次多项式f(t), 使得f(t)与位移x(t)之间差值的平方和I最小, 计算如下:

式中,A1、B1、C1、D1为多项式f(t)的系数。所得位移如下:

最终对位移数据进行插值处理, 减小取样频率低引起的峰值误差。
2 多功能水槽波浪模拟试验
2.1 试验采用的浮标
试验所用的浮标是一种新型空投波浪测量浮标,其总体结构如图3 所示。浮标由4 部分组成, 从上到下依次为: 天线舱、电路模块舱、电池舱和减速板及其启动装置模块。天线舱内部装有北斗卫星天线, 加速度传感器、数据处理电路和北斗天线电路装于电路模块舱, 电池舱的下部是减速板的启动模块, 减速板可以覆盖于电路模块舱和电池舱表面。该浮标不同于传统的球体波浪浮标与普通的空投浮标, 其外形为伞状, 上部存在一个可展开的减速板, 除了替代降落伞减小降落过程的速度使浮标安全落入水中外, 还可以增强浮标的随波性能, 另外由于表面张力的作用, 减速板上所使用的544 航空伞布会与水面紧紧地贴在一起, 这使得浮标很容易地随着波浪上下运动, 从而更加准确地反映波浪的起伏变化。
浮标总长0.887 m, 减速板闭合状态时最大直径为0.124 m, 展开状态时最大直径为0.89 m, 主体材料为铝合金, 上部天线舱采用ABS 塑料, 减速板的启动装置含有配重块, 用于改变浮标重心, 减速板的主梁由玻璃微珠复合材料和钢板制成, 密度约为600 kg/m3, 可以增加浮标的储备浮力。以浮标的减速板所在平面为基平面, 浮标在静水中漂浮的水线面与基平面重合, 浮标的重心高度为–0.229 m, 浮心高度为–0.136 m, 初稳心高为+0.152 m, 排水量为4.36 kg。

图3 浮标总体布局与减速板结构Fig. 3 Layout of a buoy and the structure of an air-brake flap
2.2 试验布局和方法
试验中采用标准波高仪作为对照, 波高仪安装于支架上并垂直固定于海水中, 利用海水的导电性,通过电测方法测量波高仪浸泡于海水中的高度来测量波高, 在试验前需要对波高仪进行标定, 减小波高仪测量的误差。本次试验所用波高仪测量范围为0~1 m, 标定完成后的测量精确度为0.03 mm, 采样频率为20 Hz, 数据采集系统可以将波高仪采集的波浪高度、时间和采样序号输出为多格式文本文档。
试验在多功能水槽中进行, 水槽长130 m, 宽18 m,深6 m, 水深4.5 m, 包括造波机、运动平台、水池、多孔消波堤和控制室, 试验布局如图4 所示。造波机可以制造波高小于0.5 m 的不同高度和周期的波浪,运动平台搭载着波高仪能够沿水池横向运动, 平台的右侧为试验区, 空投波浪测量浮标放置于此区域,试验区至造波机的距离大于波浪的6 倍波长, 确保制造的波浪传播至试验区前达到稳定状态。在试验区的前方, 运动平台搭载的波高仪需要保持竖直方向, 减小由于波高仪振动倾斜引起初始水面基准的变化, 因此波高仪需要安装紧固, 并且每次造波前要检查波高仪的姿态是否准确, 防止在造波过程中被波浪打歪, 波高仪的安装如图5 所示。另外, 空投波浪测量浮标为投弃式浮标, 没有锚链固定, 在水中会随波漂流, 为了保证每次试验中浮标不会距离消波堤过近而造成试验终止, 故需要连接一根可释放的绳子, 每次试验完成后通过绳子将浮标重新置于初始位置, 绳子采用等浮力绳, 即绳子的密度与 水的相同, 减小因绳子重力牵引浮标而引起的误差。
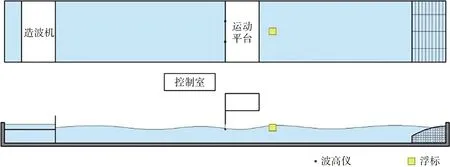
图4 试验布局Fig. 4 Layout of the experiment

图5 安装波高仪Fig. 5 Installation of the wave height gauge
波浪模拟试验中, 空投波浪测量浮标和波高仪同时测量造波机所制造波浪的参数, 然后比较两者所测的波形, 以波高仪测得的波浪参数为真实值, 计算浮标所测波高和波周期的误差, 检验测波方法的准确性。试验分为10 组, 每组造波持续 120 s, 且全部采用规则波浪, 按照波浪高度和波浪周期分为2 部分, 如表1 所示。第一部分保持波浪周期为2 s 不变, 进行5 组试验, 验证在不同波浪高度下测波方法的准确性; 第二部分改变波浪周期, 进行5 组试验, 验证在不同波浪周期下测波方法的准确性, 同时相应的改变波浪高度, 防止出现波浪破碎的现象。
在波浪测量算法中, 设定积分精度αT=0.972,截止频率fT=2。浮标在波浪中的漂浮姿态如图 6所示。

表1 波浪参数Tab. 1 Parameters of the waves

图6 浮标在波浪中的漂浮姿态Fig. 6 Motion of the buoy in a wave
3 试验结果与分析
3.1 浮标和波高仪所测波形的比较
波高仪直接输出位移参数, 即波形, 而MEMS加速度传感器输出浮标运动的参数, 包括姿态角度、加速度和角速度, 因此这些参数需要进行积分处理才能够显示所测量波浪的波形, 并与波高仪所测波形进行对比。选择实验开始后30~90 s 的数据进行处理, 以避免波浪最初传播时的不稳定状态, 波形的处理结果如图7 所示。
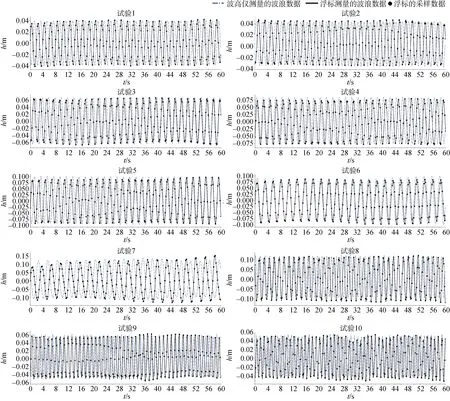
图7 10 组试验的波浪数据处理结果Fig. 7 Wave data measured using the buoy and wave height gauge after 10 experiments
图7 中, 由于波高仪与浮标之间存在一定的距离且浮标为自由状态, 会出现以下两种情况: (1)造波开始后, 波高仪首先接触波浪, 经历一段时间波浪才能传递到浮标, 因此浮标和波高仪测量的波形必然存在相位差; (2)波浪传递到多孔消波堤时会发生反射, 因此无论浮标还是波高仪测量的结果, 在后期波高和周期都会有小幅度的变化, 如图8 所示,加速度变化规律发生明显改变, 而且浮标距离消波堤更近, 首先变化。
观察图7 中每组试验波形的振幅和周期, 前7 组试验中, 除了后期由于波浪反射的原因, 浮标测得的波高和周期与波高仪测得结果极为接近, 而后3组试验中, 造波机制造的波浪出现了轻微的破碎,导致波浪的高度和周期不规则, 但浮标与波高仪所测波形的振幅依旧非常接近, 周期变化也比较相似。

图8 7 号和9 号试验浮标的原始加速度数据Fig. 8 Variations of acceleration measured using the buoy in the Number 7 and Number 9 experiments
3.2 浮标测得波浪参数的误差
计算所选时间段内波浪的所有波高与周期, 求得其平均值Za(浮标所测波高平均值)、Ha(波高仪所测波高平均值)和Ta1(浮标所测周期平均值)、Ta2(波高仪所测周期平均值), 根据式(13)、(14)计算浮标测量的误差:
计算结果见表2。

表2 浮标与波高仪所测波浪的平均波高、平均周期、误差Tab. 2 Height means, period means, and errors measured using two instruments
根据波浪测量规范, 真实海况下的波高误差范围如式(15)所示, 其中H为真实波高, 由于此次多功能水槽试验全部采用规则波浪, 误差范围应当缩小,故误差要求小于真实波高的10%。由表2 可知, 空投波浪测量浮标所测的波高与波周期误差均低于10%,因此, 应用该波浪测量方法的浮标可以达到波浪测量要求。

4 结论
本文提出了一种基于MEMS 加速度计浮标的波浪测量方法, 阐述了积分过程中的误差影响, 并利用频域衰减积分方法减小积分过程中的低频噪声。在多功能水槽中实施波浪模拟试验, 通过制造10 组不同波高和周期的波浪, 观察对比应用该测波算法的空投波浪测量浮标输出的波形与标准波高仪输出波形, 并计算两者的平均波高和平均波周期 , 定量地分析了该测波方法的误差。根据试验结果还可以得出以下结论:
(1) 该波浪测量方法的测波误差在 10%以内,符合波浪测量规范, 并且具有通用性, 也可应用于其他类型的波浪测量浮标。
(2) 通过试验验证了该型号空投波浪测量浮标的结构与电路设计能够达到测波的要求, 为波浪浮标的设计提供了一种新的思路。
猜你喜欢
电子技术与软件工程(2022年6期)2022-07-07
学苑创造·A版(2022年4期)2022-06-18
垂钓(2022年3期)2022-05-14
垂钓(2022年1期)2022-02-09
舰船电子工程(2021年5期)2021-06-04
防爆电机(2020年4期)2020-12-14
当代陕西(2020年24期)2020-02-01
垂钓(2019年2期)2019-09-10
雷达学报(2018年5期)2018-12-05
汽车维护与修理(2018年9期)2018-10-31