
基于轨道交通的室内定位系统
2020-10-09 11:22:00孙永全邓国华
铁路通信信号工程技术 2020年9期
李 飞,孙永全,邓国华
(1.北京全路通信信号研究设计院集团有限公司,北京 100070;2.成都地铁运营有限公司,成都 610081)
车站信息化建设不仅对车站管理和效益产生明显影响,而且对整个轨道交通运输业的更高层次发展都至关重要。从成都地铁2010年第一条线开通到2017年底首条环线投入运营,呈现出蓬勃的发展态势,但是随着线网规模的扩大以及大型换乘车站数量的增加,高峰时段客流陡升常常造成严重的拥挤情况。为弥补人员经验的局限性并使管理者在宏观上对车站立体空间的客流情况有更直观地掌控,推动车站信息化建设成为了顺应发展的首要目标。
在AFC自动票务系统,CCTV视频监控等现有技术的基础上,不断追求技术创新和系统完善,加入三维场景展示、人员定位和应急指挥等信息化功能,从而提升车站管理水平,提高人员工作效率,减少人为失误,保障地铁高效运营,提升地铁服务水平。
在轨道交通的发展过程中,轨道交通的工作人员、管理人员以及轨道交通的切身受益者都更为迫切的需要一种可以实时保护他们安全的事物出现,同时他们对更加便捷、3D的定位服务也有更大需求。此外,在无线终端设备应用和无线传感器网络的不断发展与结合的今天,不仅仅是轨道交通而且还包括其他的各种行业,身处其中的人员对定位服务的需求也是越发的迫切,尤其是在大型的室内场景的三维定位。之所以对这种环境有较为迫切的需求是因为这类环境通常比较复杂,不像在室外没有太多的遮挡物,可以依靠卫星直接对地面进行信号辐射,从而直接进行比较精确的定位;在室内传统的两种主流定位技术GPS定位和蜂窝无线定位都不能很好的满足用户定位需求。特别是令人熟知的GPS定位,由于其系统的自身技术特点使其很容易受到以建筑物为主的外界因素的严重干扰,信号会出现严重衰减,产生多径效应,甚至会出现无法收到信号的情况,这就导致了其无法满足室内精确定位的需求。
三维定位中三维建模是不可或缺的一部分。在国外,三维建模已经发展了几十年,国内自20世纪80年代末开始引入三维建模思想,已经发展很长时间。三维建模技术虽然已经非常成熟,但是并非成熟的三维建模技术就认为其过程很简单,特别是对特定建筑的三维建模,需要考虑的因素非常复杂。主要是每一个物体都需要根据现实的建筑进行量身定制,不能采用现有素材。而在一个建筑物中需要建模的物体非常繁多,这些都会给实体建筑的建模带来不同程度的难度。
为了让室内3D定位更好的服务于轨道交通,就必须将其与其他的系统功能相结合。在轨道交通已经成为出行不可或缺的交通工具的今天,轨道交通的管理人员更加需要可以正确且及时显示当前客流的事物,最好还能够将常用的应急指挥方式嵌入其中,以便在遇到紧急情况时可以及时的做出反应,同时能给出一个建议的指挥方案。
1 定位技术
信号到达时间差(TDOA)是基于到达时间的改进。首先需要设置3个及其以上的信号接收点,即信号接收基站。同时还需要被定位人员携带定位设备,并能收发定位信息。由此计算信号接收站所收到信号的时间差即可计算被定位人员的坐标。此方法的优势在于无需考虑携带设备与接收站之间的时间是否同步。同时服务器得到这些接收站的信号后,将其配对按照双曲线交点模型拟合计算出其具体坐标位置。
1)TOA
到达时间(TOA)算法的基本原理是分别检测出待定位目标与信号接收点的距离,然后根据3圆相交于一点的原理得到目标物体的位置。如图1所示。
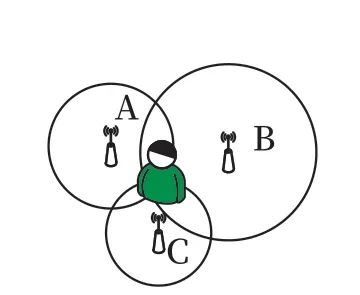
图1 TOA原理图Fig.1 Schematic diagram of TOA
对于每个信号接收基站的位置与待定位目标的位置 之间满足以下关系:

其中,Ri表示(Xi,Yi)与(x,y)的直线距离。
为了实现对待测目标精确的定位,在无其他先验知识下,需要信号接收基站的数量至少为3个。以3个探测器A、B、C的位置坐标为圆心,它们分别与待定位目标之间的距离为半径画圆,在无其他干扰的情况下,待测目标必然在3个圆的交点上。由此可列出方程组:

求解出(x,y),就可以得到待定位目标的位置。
TOA定位的优势是能极大发挥出UWB技术的特点:带宽高、时间辨识度高,由此得到的定位系统具有很高精度的定位准确度。但这是在理想状态下的情况,实际中要想得到这样的高精度,必须使各个信号接收站和被定位设备的时钟严格同步,但是这在具有网络延时的不同设备间是完全无法实现的。也就使得此方法的精度会因为接收站和被定位设备的时钟关系出现不同程度的无法修正的误差。之所以说这个误差是无法修正的,是因为在通过系统参数调节后,即使达到了较好的效果,一旦任何设备掉电重启,或者网络延时波动发生变化,就会导致前面的修正参数发生改变,而这个改变是没有规律可循的。
为了解决这个问题,衍生出TOA的改进算法TDOA。此方法无需接收站和被定位设备严格的时钟一致,只需信号接收站同步即可。
2)TDOA
TDOA通常有两种计算方法:一是采用异步TOA求差得到TDOA;二是将接收站信息通过服务器进行数据对比,并结合基站参数运算处理。两种方法中后者计算量较大,会给服务器造成很大压力,故通常采用前者。前者方法在求差的过程中就消除了时钟不同步造成的误差。
项目采用这样一种具有共同参考时钟的测距估计技术,即TDOA技术。因为它是通过找出多条双曲线交点的方法来确认目标坐标,所以也称其为双曲线定位技术。假如有3个基站作为信号接收站在接收信号,将其组成两组,并分别令其为双曲线的两个焦点作出双曲线,两对双曲线的焦点即为被定位设备的位置。定位示意如图2所示。

图2 TDOA原理图Fig.2 Schematic diagram of TDOA
假设进行定位的是BS1、BS2和BS3,其 中 目标和各基站之间的距离是r1、r2和r3。则目标到BS1和BS2之间的距离差r21=r2-r1,依据数学原理,目标必然位于以BS1、BS2为焦点、以r21为焦距的双曲线上;同理,由BS1、BS3和距离差r31=r3-r1,可知定位目标同样位于以BS1、BS3为焦点、以r31为焦距的双曲线对上。
由此可列出如下方程组:

式中,(x,y)为被定为设备坐标,(Xi,Yi)为所有信号接收站坐标,r1为采用TOA计算得到的被定位设备与信号接收基站的距离。其解(x,y)为被定为设备坐标。
在图2的原理图中能得到:在两组双曲线中有概率存在两个交点,当双曲线的数量增多时这种情况会更加明显,此时就需要结合实际情况中增加其他判定条件来去除解组中的非真实解坐标。
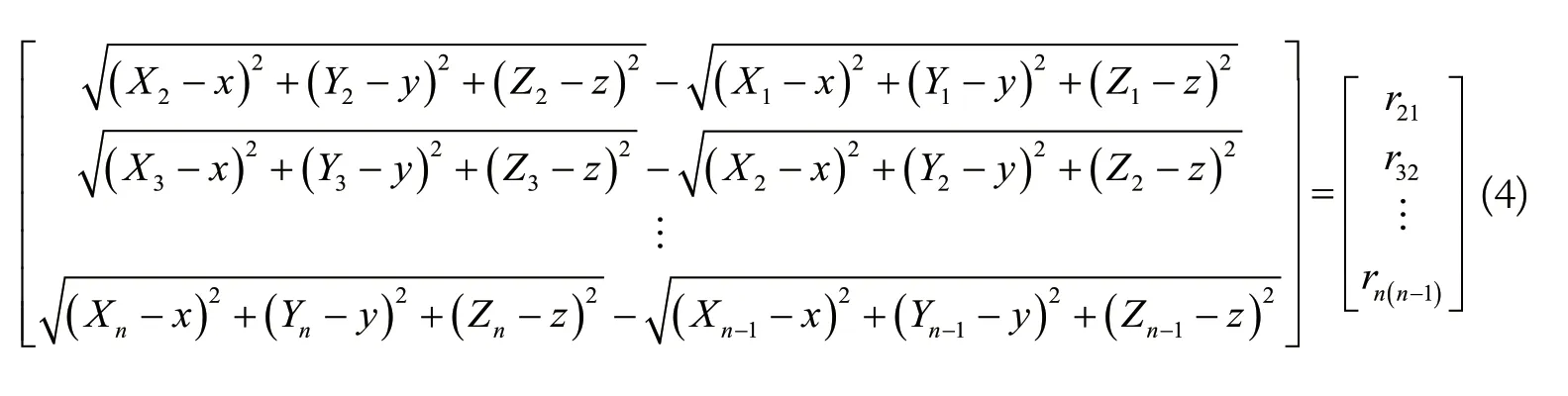
对于三维场景的定位,需要用到较多的接收点,原理与二维的几乎相同。设目标位置为(x,y,z),(Xi,Yi,Zi)(i=1,2,…n)为接收点位置坐标,可以将公式推广为:
此定位技术在不同的通信技术下可以实现不同精度的变化,主要是由于不同通信方式的自身传播距离、直线性以及多径效应状况的不同引起的。
2 UWB应用于定位
UWB技术是超带宽技术,也可称为脉冲无线电,它的通信频率很高,频带为3.1~10.6 GHz,脉冲带宽大于500 MHz。在数据通信方面可以实现无载波通信,主要是由于UWB的脉冲宽度很窄,其产生和消失时间仅为数百微秒至数纳秒以下,而在1 ns的时间里光也只能传播约30 cm的距离。
UWB使用在室内定位方面主要体现出来的优势有以下几点:1)低功耗:UWB标准化芯片的低功耗特点使得被定位设备和定位基站都可以在较低功耗下运行;2)信道稳定性好:遇到信号多径传输的状况可以采取脉冲信号进行区分,在不可见场景中只要信号可以到达,也不影响定位效果;3)抗干扰:由于其信号的特殊性,一般的电子信号无法对其造成干扰。同时具有很好的穿透性,通常可穿透一道24 cm的砖墙。这些优势使其具有很高的定位准确度和定位精度,经过大量的试验测试发现,当信号接收基站的数量为4时,就可以达到0.5 m的检测准确度,甚至在较理想环境中可以达到0.3 m的定位精度。
3 三维建模
3D建模属于应用层的系统应用软件部分,采用专业建模软件Revit、3DsMax与浏览器WebGL的3D绘图协议混同组合的方式进行三维建模,并使用Three.js引擎进行动态渲染与动画演示,实现三维场景展示。
WebGL是一种3D绘图协议,也是一种网页3D技术,此技术无需在浏览器安装插件,只需要使用此技术,在网页端编写前端代码即可实现在网页上显示3D模型。同时此技术还可以调用Canvas进行场景的3D渲染,并且还能调用计算机显卡的运算能力,减少计算机CPU的负担,也使得三维模型可以更加流畅的在网页上运行。如果在软件中嵌入浏览器内核,还可以实现跨平台显示,使得在各种操作系统(PC端的Windows和Linux的各种版本、移动端安卓和苹果系统的各个版本)之间都能随意使用。
在实际的三维建模场景搭建中,可以采用专业建模软件Revit、3DsMax与浏览器WebGL的3D绘图协议混同组合的方式。根据三维场景实际需求,对于组成三维场景的建筑模型、设备模型、人物模型等,可以直接全部用WebGL编写代码的方式实现,也可以采取部分模型用Revit或3Ds Max软件建模后导出Obj格式模型文件,再通过WebGL代码导入到三维场景中的方式。
一个完整的三维场景由以下几个部分组成。
渲染器:三维引擎的核心部分,是高级全局照明渲染插件。
场景:系统展示三维模型的一个可视化空间,用于容纳所有的三维模型。
照相机:系统的视觉感应器官,用于将三维模型的数据转为可视化模型。
光源:物体需要在光照条件下才能可见;否则将无法看到所建的物体模型。
物体:需要要表现的内容,会有形状和材质属性。
4 系统框架
基于室内定位的轨道交通三维应急指挥系统主要是由感知层、传输层、服务层、网络层、应用层组成,如图3所示。

图3 整体结构Fig.3 Overall architecture
应用层包括了系统应用软件和应用层对外接口软件,系统应用软件主要实现3D模型的展示及其3D定位数据的图形化显示。而应用层的对外接口主要是向其他系统提供其需要的数据,方便与用户原有的其他系统进行数据交流。
服务层由定位引擎软件、3D模型、系统管理软件组成,这些软件和算法部署在系统服务层服务器。定位引擎软件实现定位数据的解算,得到定位标签的坐标;定位系统管理软件实现定位网、通信网、无线传输网的管理及维护功能,并作为应用层到感知层的数据交换桥梁;3D模型为系统提供良好的三维模型,方便定位数据在三维空间中进行显示。
传输层分为无线传输网和有线传输网,无线传输网通过Wi-Fi信道为定位基站提供数据传输链路,有线传输网通过有线以太网方式为定位基站提供数据传输链路,并且有线传输网还为无线传输网提供数据传输链路。
感知层包括定位基站、通信基站、通信定位基站以及定位标签。主要是用于获取系统所需的基础数据,包括定位数据和人流数据。为系统的其他层级进一步运算以及显示提供强有力的支持。
5 总结
本系统结合UWB技术、TDOA技术、三维建模技术将轨道交通站点的人员状况、站内场景状况以可视化的方式展现出来,并在此基础上结合轨道交通的特点进行一系列的应用测试,并在测试过程中取得较好的实验效果。
猜你喜欢
煤气与热力(2021年9期)2021-11-06 05:22:56
煤气与热力(2021年7期)2021-08-23 01:11:10
化工管理(2021年7期)2021-05-13 00:46:34
中国交通信息化(2018年9期)2018-11-09 01:09:14
电测与仪表(2017年20期)2017-12-19 05:14:28
中学生数理化(高中版.高二数学)(2017年1期)2017-04-16 05:33:43
高中生·天天向上(2016年8期)2016-11-22 09:22:46
通信电源技术(2016年1期)2016-04-16 04:57:34
天然气与石油(2015年2期)2015-02-28 17:01:09
中学数学杂志(2015年9期)2015-01-01 09:00:16
