
变焦系统中可调光焦度器件初值分析
2020-10-09 11:10:00程洪涛李恒宇
光学仪器 2020年4期
程洪涛,李恒宇
(1.上海健康医学院 发展规划处,上海 201318;2.上海大学 精密机械系,上海 200444)
引 言
光学变焦系统的发展经历了三个阶段:第一阶段是通过更换物镜使显微镜倍率改变达到变焦[1-2];第二阶段是通过整体移动部分光学组件的光学补偿变焦[3-4];第三阶段是透镜的移动方程成曲线的机械补偿变焦[5-6]。随着研究不断深入,产生了可调光焦度器件[7-8],基于可调光焦度器件的新一代变焦系统的最大优点是:给光学设计者提供额外的自由度,因无需移动的光学器件,不用昂贵的精密移动机构,提高了变焦光学系统的鲁棒性;可调光焦度器件的材料比玻璃轻,能够减少系统的总重量[9],同时使系统结构更紧凑。
下一代变焦系统是用可调光焦度器件设计,可调光焦度器件能够代替需要机械运动装置实现变焦的光学系统,将对变焦系统发展产生革命性的突破,为可穿戴式设备、手机、内窥镜等变焦系统更新换代创造条件[10-11]。本文对基于可调光焦度器件的变焦系统进行像差理论分析,通过讨论可调光焦度器件的球差、彗差与形状参数、放大率的关系,快速获得变焦系统中可调光焦度器件的初值。
1 可调光焦度器件变焦系统的像差分析
在变焦光学系统中,光束的孔径角和成像物高往往都比较大,即高级像差相当大,因此初级像差不能充分地代表变焦光学系统的成像性质。尽管初级像差不足以充分代表变焦光学系统的成像质量,但是它正确反映了光学系统小孔径和小视场情形下的成像性质。对于一个具有较大孔径和较大视场的实际变焦光学系统,如果其成像清晰,则在小孔径和小视场范围内成像必然是清晰的。对于一个成像质量优良的变焦光学系统,使初级像差校正到一定限度内,虽然不是一个充分条件,但却是一个必要条件,因此研究初级像差对于设计变焦光学系统仍然具有重要的实际意义。目前初级像差理论已经比较完善,并且已被广泛地应用于实际的光学系统设计中;高级像差虽然有不少研究,但是由于问题本身的复杂性和计算量过大,因此在实际的光学系统设计中应用较少。共轴球面变焦系统一般主要讨论初级像差,对高级像差不作讨论。
物体通过一个共轴变焦光学系统后,在像空间形成带有像差的像,而此像差是各个光学面综合作用产生的。如图1 所示,光线通过第j 个面以后,总的像差可以分为两部分:一部分是第一面到第(j−1) 面所产生的;另一部分是第j 面至最后第 k 面产生的。由于第一面到第(j−1) 面存在像差,因此第 j 面的入射光束已经具有像差。第j 面产生的像差不仅和它本身的结构参数如曲率半径、折射率及物体位置有关,而且和入射光束的像差有关,因此入射光束的像差不同,光线在第j 面上对应的入射位置就不同,它所产生的像差也就不同。因此系统中各个球面对于像差的影响并不是彼此独立的。

图1 光线通过光学系统图Fig.1 A paraxial ray passing through an optical system
如果只考虑光学系统初级像差而忽略高级像差,则可以认为每一面产生的像差和入射光束的像差无关。因此系统中每个光学面产生的像差认为是彼此独立的,此即为初级像差的独立性原理。
根据初级像差的独立性原理,可以分别求出系统每个光学面的像差,并且认为每个折射面入射光束也是处于没有缺陷的理想状态。由此,为研究一个共轴光学变焦系统的初级像差,只要研究单个折射球面的像差即可,从而使研究大为简化。本文应用像差独立性原理研究基于可调光焦度器件变焦系统,可调光焦度器件变焦系统的一阶光学设计任务是根据变焦基本准则确定系统的光焦度和光阑控制方程,并不能得到变焦系统的最终成像质量,还需要应用三阶像差理论进行研究。所以当变焦系统的一阶控制方程给定以后,还需要按变焦基本准则[12],确定系统的成像质量,也就是讨论变焦系统的像差变化情况。
2 变焦系统中可调光焦度器件初始结构分析
2.1 球差与形状参数、放大率的关系
可调光焦度器件的变焦系统的像差优化过程与一般的光学系统的像差优化过程是一样的,因此可用初级像差来表示可调光焦度器件变焦系统的像差贡献。初级像差能够指出各种像差来自系统何处,而且计算迅速,可以不做实际光线追迹而在短时间内做出一个近似设计方案。引入透镜的形状参数X,围绕形状参数 X 与像差中的球差、彗差的关系来分析透镜的形状参数对变焦系统像差的影响。
图2 是一个透镜对无限远轴上物点成像产生的球差示意图。透镜的球差与透镜形状有关,还与物点的位置、光阑位置和大小有关。改变透镜的形状(曲率半径),不改变透镜的口径、折射率和焦距,简单透镜的球差会改变,这种降低球差的过程称为“透镜弯曲”。将薄透镜两面的TSC(横向球差)合并,系统中的薄透镜或密接薄透镜组在最后像方产生的初级球差[13]为

式中:n 为透镜折射率;G1=n2(n −1) /2;G2=(2 n +1)(n −1) /2;G3=(3 n +1)(n −1) /2; G4=(n +2)(n −1)/(2 n);G5= 2(n2−1) /n;G6=(3 n +2)(n−1)/(2 n);v 为透镜的物距倒数(又称为物空间的聚散度);c1为透镜第一面的曲率; c2为透镜第二面的曲率; c=c1−c2; u′为光线在像方出射后的倾斜角;y 为光线入射到表面的高度; h′为像高。

式中:

图2 球差示意图Fig.2 Spherical aberration

由于只考虑形状参数对球差的影响,且是针对单个透镜,因此定义一个与形状参数有关的量,称之为类球差 tscX,以此表达形状参数和球差的关系,则有

对式(3)求导,得到

令式(4)等于零,可得
此时,类球差绝对值取得极小值。由式(5)可得透镜第一、二面的曲率计算式:
对式(5)代入 G、e1、e2,得

式(6)~(8)是类球差 tscX绝对值取得最小值时单个薄透镜的曲率半径和形状参数取值公式。为了更直观理解类球差,下面对物点在无限远及有限远位置进行分别讨论。
(1)物点在无限远
对于无限远轴上物点,即 v=0 ,当取类球差最小值时,能够得到:
各式下标 op 表示取得最优值,即类球差最小值时的取值。依据式(9)得到折射率与形状参数的关系图,如图3 所示,由图可以看出,当折射率 n∈(1,2) 时,单个透镜的形状参数与折射率成近似线性关系,且 X∈(0,1.5) 。依据式(10)得到折射率与(c1/φ)op的关系图,如图4 所示,可以看出,折射率越高,(c1/φ)op值越小,即在透镜光焦度一定的情况下,第一表面弯曲程度越平坦。依据式(11)得到折射率与(c2/φ)op的关系图,如图5 所示,从图可以得出:折射率越高,总体上(c2/φ)op值越小,即在透镜光焦度一定的情况下,第二表面弯曲程度越平坦;但当折射率n=1.686 14 时,c2=0 ,即为平面,此时 X=1 ,(c1/φ)op=1.457 43。计算表明,对于无限远轴上物点来说,当折射率 n=1.686 14 时,单透镜的形状为凸平、凹平型,球差最小。由此得到折射率、形状参数与 tscX/φ3的函数关系如图6 所示。
从图6 可以看出,当折射率确定时,利用与n 轴垂直剖切面去截图,能够得到 tscX/φ3与X 的截面曲线。图7 是不同折射率时得到的(tscX/φ3)op与X 之间的函数关系图,从图中可以看出,在 X∈(0,1.5) 的时候,能够获得类球差最小值,如表1 所示。从表1 可以看出,光焦度相同时,折射率越高,类球差越小,即球差越小,也就是说明了选用高折射率的材料是降低球差的一种途径。
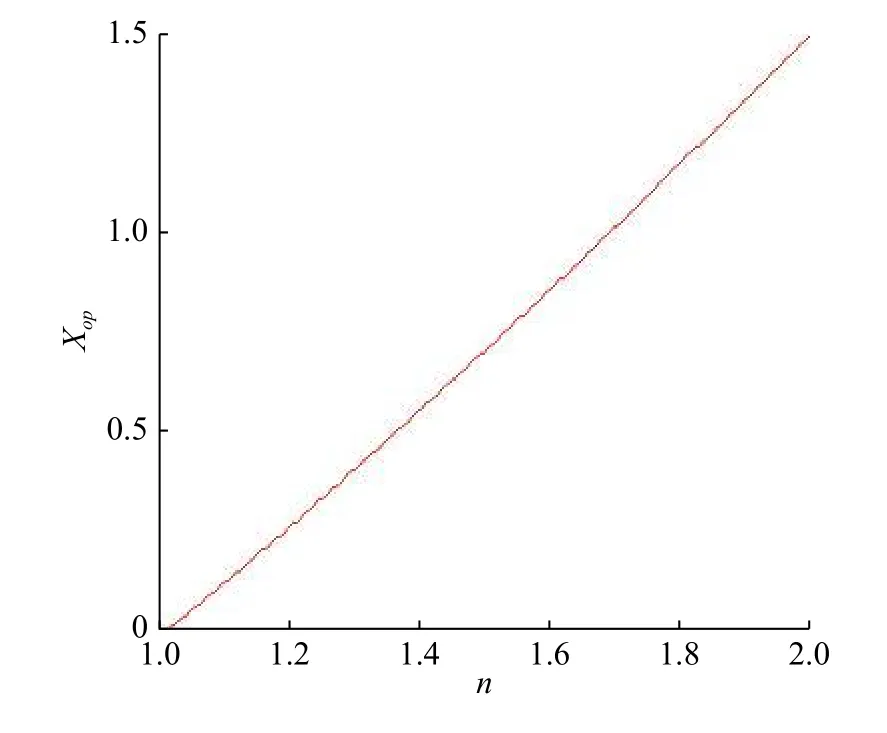
图3 折射率与形状参数的关系图Fig.3 Relation between refractive index and shape parameter

图4 折射率与(c1/φ)op 的关系图Fig.4 Relation between refractive index and(c1/φ)op

图5 折射率与(c2/φ)op 的关系图Fig.5 Relation between refractive index and(c2/φ)op

图6 折射率、形状参数与 tscX/φ3 的函数关系图Fig.6 Relation of refractive index,shape parameter and tscX/φ3
(2)物点在有限远
物点位于有限距离的时候,即v=1/s(s 为物距),形状参数与类球差的关系比无限远情况更复杂。物距是和系统放大率有关的量,因此对于一个透镜系统有

式中 m 为放大率。
将v 代入式(13)得到

将式(14)代入(3)得到

式中:

图7 不同折射率情况下,(tscX/φ3)op 与X 之间的函数关系图Fig.7 Relation between(tscX/φ3)op and X under different refractive indices

表1 不同折射率下的最优值Tab.1 Optimal value under different refractive indices

当球差取得最小值时,依据式(5)~(7)、(15)有:
分别取n=1.2、1.5、1.8,m∈[−2,0] ,根据式(16)~(19)得到图8~11。从图8 我们发现,不管折射率取何值,m=−1 处是共同的交点,此时 X=0 ,也就是 c1=−c2。从图9 可知,当变焦系统的放大率逐渐从−2 到0 时,折射率取值越大,形状参数的变化率在加速变化,即梯度在增大。从图11 可知,折射率取值越大,(tscX/φ3)op值就越小,说明高折射率能够得到小的球差值,与物点在无限远结论一样。
物点在无限远时,得到形状参数只和折射率有关,因此以折射率作为变量分析;物点在有限远时,考虑到变焦系统中倍率是一个关键参数,因此把物距转化成倍率参数来分析。
2.2 彗差与形状参数、放大率的关系
与初级球差类似,薄透镜的初级彗差也有表达式,初级彗差如图12 所示。当光阑在薄透镜上时,弧矢方向的初级彗差[13]可以表示为

式中:


图8 Xops 与放大率的函数曲线Fig.8 Relation between Xops and magnification

图9 (c1/φ)op 与放大率的函数曲线Fig.9 Relation between(c1/φ)op and magnification

图10 (c2/φ)op 与放大率的函数曲线Fig.10 Relation between(c2/φ)op and magnification
在此也定义一个类彗差,其表达式为

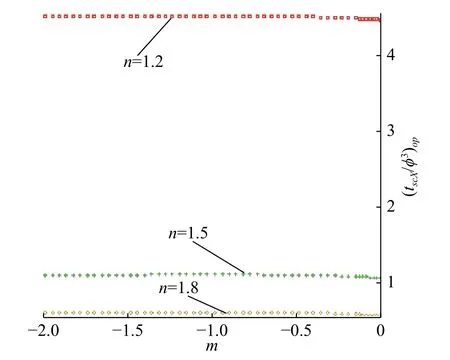
图11 (tscX/φ3)op 与放大率的函数曲线Fig.11 Relation between(tscX/φ3)op and magnification

图12 彗差示意图Fig.12 Coma
将式(14)代入式(21),得到

为了定量分析 X 取值对球差和彗差的影响,令式(22)为零,得到彗差取得最优值时形状参数的取值,即

为了进一步与球差相比较,式(23)可以写成

同时根据式(16)得到球差取得最优值时形状参数的表达式

图13 与 X 的关系图Fig.13 Relation of and X

依据式(24)、(25),可得到图14,由图可知,当放大率相同时,折射率越大,球差和彗差的形状参数相差越大。

图14 最优值的比较图Fig.14 Comparison of the optimal values
当取相同的折射率 n=1.6、m∈[−2,0] 时,式(24)、(25)可写成


依据式(26)、(27),得到图15 曲线图,由图可以看出,二者最优值相差较小,变化趋势一样,几乎同时取得优值。因此可以得出,对于任何薄透镜系统,球差达到了代数优值时的弯曲状态,几乎也就是彗差优值的弯曲状态。因此在可调光焦度器件变焦系统中,当光焦度改变时,我们可以依据校正初级彗差或初级球差的要求平衡确定透镜的形状参数,为进一步优化像质提供参考。

图15 Xop 与放大率之间的关系图Fig.15 Relation between Xop and magnification
3 结 论
本文根据光学变焦系统中可调光焦度器件的初值确定要求,提出了采用薄透镜像差理论分析形状参数与变焦系统放大率的设计方法。根据变焦基本准则、初级像差理论、像差独立性原理和薄透镜原理,采用球差和彗差最小值对可调光焦度变焦系统初值确定进行了研究。研究表明,本文采用的变焦系统放大率与形状参数的计算方程基本满足变焦系统中可调光焦度器件初值的确定,且具有简单、快速、可靠等特点。
猜你喜欢
世界最新医学信息文摘(2022年5期)2022-12-07 09:25:34
现代仪器与医疗(2021年4期)2021-11-05 08:25:18
国际眼科杂志(2019年10期)2019-10-12 09:19:20
摄影之友(影像视觉)(2017年10期)2017-11-07 02:37:15
中国设备工程(2017年11期)2017-06-29 12:00:51
大众摄影(2016年12期)2016-12-07 18:32:41
国际眼科杂志(2016年11期)2016-11-09 00:59:25
光学精密工程(2016年1期)2016-11-07 09:01:05
中国光学(2015年1期)2015-06-06 18:30:20
安徽医药(2014年4期)2014-03-20 13:13:18
