搭载电池快换装置的无人机续航移动基站*
2020-09-30 06:32:32李海琳平雪良田森文冯陆颖孙明春
机械制造 2020年8期
□ 李海琳 □ 平雪良,2 □ 田森文 □ 冯陆颖 □ 孙明春 □ 陈 壮
1.江南大学 君远学院 江苏无锡 214122 2.江南大学 机械工程学院 江苏无锡 214122
1 设计背景
近年来,无人机技术发展势不可挡,但无人机续航时间短的问题始终限制着无人机行业的发展。针对如何提高无人机续航能力,有许多研究。从研发新型电池出发,张旺旺等[1]提出通过铺设足够多的太阳能电池板来提供无人机飞行所需的动力。从研发具有混合动力的无人机出发,张晓辉等[2]提出在锂电池与燃料电池混合供电系统中,对燃锂混合和飞行状态进行综合优化,进而降低无人机的燃料消耗。从研发地面供电系统出发,付松源[3]利用机载电源模块和超轻型光电复合系统代替普通多旋翼无人机的机载电池,实现无人机持续滞空。从研发无线充电系统出发,马秀娟等[4]设计了基于无线充电耦合的无人机无线充电系统,可以在错位30 mm的范围内对80 W无人机正常充电。从研究智能更换电池系统出发,FLYBi无人机能降落在起落甲板上自动更换电池。
上述研究的研发时间成本和经济成本均较高。新型燃料和混合动力目前不具备产业化能力。地面供电系统有地面高压供电和飞行控制难度高等多个技术难点。无线充电系统容错率较低,且对无人机降落精准度要求高。目前的智能更换电池系统虽然较人工更换电池效率有所提升,但是更换后的电池仍需要人工取回进行充电。
综合上述研究背景,笔者设计了一种搭载电池快换装置的无人机续航移动基站。移动基站是无人机的起降平台,搭载电池自动快换装置后可以实现自动更换电池,同时能够携带电池盒装置和移动电源装置为无人机持续供能。
2 无人机续航移动基站组成
搭载电池快换装置的无人机续航移动基站由四个模块组成:① 机器视觉和卫星-惯性导航组合定位系统双重定位模块,其关键技术是使用单目视觉提升卫星-惯性导航组合定位系统的定位精度,从而获得无人机自主降落的精准位置信息;② 电池自动快换装置模块,用于无人机精准降落后为无人机自动、迅速更换新电池,模块中附有无人机降落标志,辅助无人机视觉定位;③ 电池盒组与自动快充单元模块,包括旋转型电池座及与之相连接的自动快充单元,用于实现基站对多个无人机更换电池,持续供能;④ 全方位移动底盘模块,用于搭载电池自动快换装置模块、电池盒组与自动快充单元模块,并用作无人机的通信基站。搭载电池快换装置的无人机续航移动基站系统框架如图1所示。
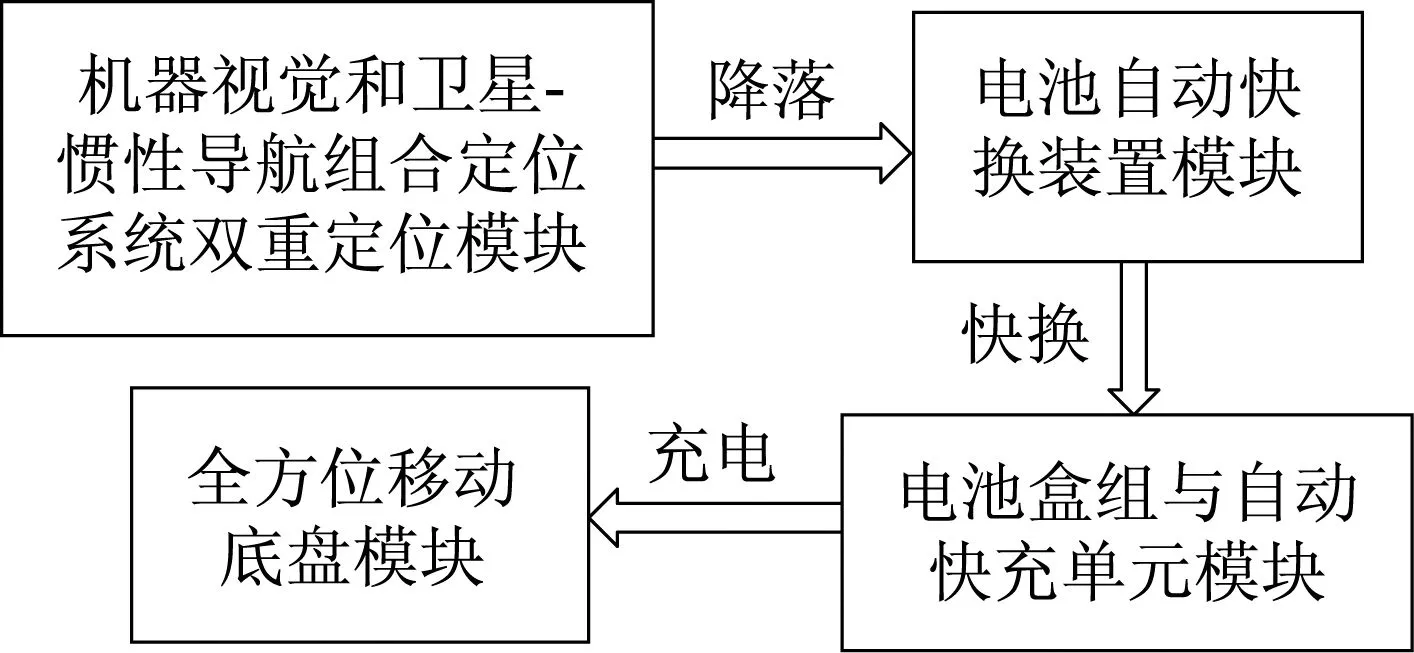
▲图1 无人机续航移动基站系统框架
2.1 机器视觉和卫星-惯性导航组合定位系统双重定位模块
机器视觉和卫星-惯性导航组合定位系统双重定位模块中,机器视觉负责采集无人机降落时的图像,并对其进行处理和传输。为减小运算量并提高降落精度,设置标识物进行辅助视觉定位。卫星-惯性导航组合定位系统负责处理、融合全球定位系统和惯性导航系统的数据,这两部分数据通过主控计算机融合,获得更为精准的位置信息。机器视觉和卫星-惯性导航组合定位系统双重定位模块原理如图2所示。

▲图2 机器视觉和卫星-惯性导航组合定位系统双重定位模块原理
笔者设计采用两个内置惯性测量单元的飞行控制器,两个惯性测量单元之间的数据相互实时备份。外置高性能导航模块,实现返航的精确性。配置STM32嵌入式单片机的USART2串行通信端口与个人计算机进行通信,个人计算机的应用程序通过机载计算机与连接至USART3串行通信端口的飞行控制器进行通信。机载摄像头采用OV7725摄像头,其硬件自适应曝光,且可与控制器连接,直接输出数字信号,用于采集二维定点坐标信息[5]。主控计算机通过串行总线接口接收飞行控制器和摄像头的数据,并在线完成所有数据的运算和处理。
2.2 电池自动快换装置模块
电池自动快换装置模块和电池盒组与自动快充单元模块相连接,包括摩擦轮装置、移动平台车外壳、电池旋转更换装置等部分,如图3所示。电池自动快换装置模块中附有降落标志,辅助视觉导航。采用摩擦轮装置控制电池进出,可减少对电机数量的需求。电池旋转更换装置采用抓手装置与凸轮顶杆装置相配合,可以方便实现电池盒组在电池旋转更换装置多个电池座上的固定与折卸。
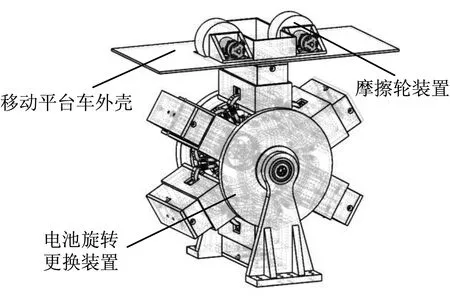
▲图3 电池自动快换装置模块结构
2.3 电池盒组与自动快充单元模块
电池盒组固定于电池自动快换装置模块上。电池盒组包括一个第一电池盒座、六个第二电池盒座、六个电池盒及六个航模电池。第一电池盒座固定于无人机腹部,第二电池盒座固定于电池旋转装置上。六个电池盒用于装载航模电池,其中一个电池盒固定于第一电池盒座中,五个固定于第二电池盒座中,空置的一个第二电池盒座始终位于摩擦轮装置正下方。自动快充单元包括移动电源和电池充电控制装置。移动电源搭载于全方位移动底盘模块上,电池充电控制装置固定于电池旋转更换装置上,两者通过内部接线连接。电池盒与电池盒座的连接如图4所示。

▲图4 电池盒与电池盒座连接
2.4 全方位移动底盘模块
全方位移动底盘模块主要由动力模块、传感器模块、控制模块、无线通信模块组成。动力模块采用四个双排全向轮间隔90°均布的方式,全向轮有主轴滚动方向、从动轮滚动方向、绕从动轮与地面接触点转动方向三个自由度[6],使底盘可以沿平面内任意方向移动。全方位移动底盘模块的车架设有多个通孔和预留空间,可用于搭载其它装置。
3 双重定位系统
目前一般的四翼无人机具有一键返航功能,即当无人机完成既定任务收到自动返航指令或者丢失控制信号后,通过自身全球定位系统的记录,自动返回返航点上方。由于全球定位系统信号易受环境影响,定位精度较低,无人机返航位置不精确,导致无法精准降落。笔者在无人机一键返航基础上,采用机器视觉与卫星-惯性导航组合定位系统双重定位来辅助无人机完成精准降落。双重定位系统流程如图5所示。

▲图5 双重定位系统流程
机载摄像机采集视觉图像,识别无人机降落标志。为简化识别算法,提高降落效率和鲁棒性,笔者采用分级地标,如图6所示。该分级地标只有黑白两色,且内外轮廓为正方形,便于阈值分割、求解高度信息。图像预处理包括图像灰度化处理、平均滤波和图像二值化处理[7]。图像特征提取包括轮廓提取、矩形检测、矩形聚类与识别,最终矩形数量最多的一类识别为正确目标。位姿数据一般采用非迭代的即插即算位姿估计算法,由于笔者采用的分级地标中特征点不多,因此采用基于面积特征的位置测量算法[8],解算出无人机相对位姿数据。采用滤波算法[9],融合全球定位系统数据和惯性导航系统数据解算出无人机绝对位姿数据。主控计算机结合无人机相对位姿数据和绝对位姿数据,解算出精准的降落信息,传输至飞行控制器。笔者采用速度控制方式,结合比例积分微分控制原理[10],使无人机不断向目标点飞行,直至降落。

▲图6 分级地标
4 自动更换电池自动快充系统
无人机成功降落至移动底盘的无人机固定装置上,电池自动快换装置模块和电池盒组与自动快充单元模块通过四个步骤完成自动更换电池并自动快充电池的过程。第一步为固定无人机,通过四个导轨,无人机固定装置将无人机正位并固定。第二步为取电池。电池盒固定杆收缩,摩擦轮装置启动,使旧电池盒缓缓落至顶杆处,并随顶杆继续向下移动,落入电池盒座内,抓手装置固定旧电池盒。第三步为安装电池。圆筒形电池盒旋转,将新电池转至无人机正下方,旧电池被抓手装置固定,并触发电池充电装置,为旧电池充电,充电完成之后又自动断开。新电池的抓手装置松开,凸轮顶杆装置将新电池盒推至摩擦轮处,摩擦轮反方向旋转,将电池盒推入电池盒座内。第四步为装置复位。无人机固定装置复位,为下一次动作做好准备。自动更换电池自动快充系统工作流程如图7所示。
5 结束语
笔者针对无人机续航时间短、人工更换电池过程复杂的问题,对现有的无人机技术进行集成和创新,设计了一种搭载电池快换装置的无人机续航移动基站。这一无人机续航移动基站采用机器视觉和卫星-惯性导航组合定位系统双重定位技术,通过速度控制结合比例积分微分算法使无人机不断向目标点飞行,降落标志采用分级地标,解决小型四翼无人机自主降落位置不精确的问题。应用这一无人机续航移动基站,可以简化更换电池的过程,搭载于全方位移动底盘模块上的电池盒组与自动快充单元模块能够实现为多个无人机持续更换电池。
猜你喜欢
车主之友(2022年6期)2023-01-30 07:59:12
车主之友(2022年4期)2022-08-27 00:58:10
车主之友(2022年5期)2022-04-06 11:54:26
军民两用技术与产品(2021年7期)2021-10-13 08:12:10
湖北农机化(2020年4期)2020-07-24 09:07:44
当代陕西(2019年15期)2019-09-02 01:52:04
探索科学(2017年4期)2017-05-04 04:09:47
中国交通信息化(2016年8期)2016-06-06 03:56:25
中国惯性技术学报(2015年1期)2015-12-19 13:11:49
移动通信(2015年17期)2015-08-24 08:13:10