
基于视频监控的快速行人检测算法
2020-09-29 13:10:16谢敏
无线电工程 2020年10期
谢 敏
(南京邮电大学 通达学院,江苏 扬州225000)
0 引言
行人检测是计算机视觉领域的重要研究课题[1-2],应用于人工智能系统、智能车辆驾驶系统等领域。存在视频环境复杂,天气、光照强度和角度都有变化;人体纹理信息和形态的多样化等干扰因素,使得图像特征信息检测的速度慢、识别率低。行人的特征提取大多采用滑动窗口全局搜索的方法,因此滑动窗口的数量和图像大小成正比。检测过程中大部分窗口不含有检测目标,所以减少窗口数量可以减少无效的检测,进而提高检测效率[3-7]。本文提出利用混合高斯模型对视频中运动目标进行检测,对运动区域进行梯度直方图的特征提取,大大减少了特征提取的区域范围,从而提高了检测效率。
1 混合高斯模型
行人检测易受特征描述子的维度和待检测图片大小等因素的影响,维度越高、视频图片越大都会造成检测时间变长。行人的状态是移动的,因此利用运动目标进行检测,检测出视频中的运动区域[8-10]。对运动区域提取特征,大幅减小了特征检测区域,从而减少检测时间,提高检测效率。
混合高斯模型常应用于复杂场景下的背景建模,因其能适应背景的变化,所以优于其他传统模型。本文使用自适应混合高斯建模(GMM),对于随机变量X的观测数据集(x1,x2,…,xN),xt=(rt,gt,bt)为t时刻像素的样本,则单个采样点xt的高斯分布概率密度函数:

在高斯混合模型中,视频中光强度随时间的改变发生动态改变,因此背景图像需要不断地更新。
在视频中,行人运动速度缓慢,在路口需要等待较长时间,所以传统的高斯模型很难检测出运动速度缓慢或者静止的前景。根据行人运动的特点对高斯模型进行了改进,通过系数控制前景融入背景的时间,减少前景成为背景的可能性。
如果行人p在场景中的停留时间tp足够长,满足tp>ts,其中,wp,ts=1-T,则:
wp,tp>1-T,p≤k,
即:
此时,静止的行人p进入背景模型,所有把权值的均值也作为前景分割的条件,
wk,t=(1-λ)wk,t-1+λ(wk,t),
式中,wk,t为权值的均值,表示每个高斯模型的权值在时间上的均值;λ为学习率。
2 HOG特征提取
更新检测区域范围,调整区域范围为方向梯度直方图(Histogram of Oriented Gradient,HOG)检测窗口大小,尤其是前景的边缘,容易出现漏检的情况,对候选区进行提取HOG。
HOG的思想是:图像中梯度和边缘的方向密度分布可以较好地描述局部目标的表像和形状[11-15]。因而可以对候选区进行提取HOG,再结合SVM分类器,对行人做检测。HOG特征提取流程如图1所示。
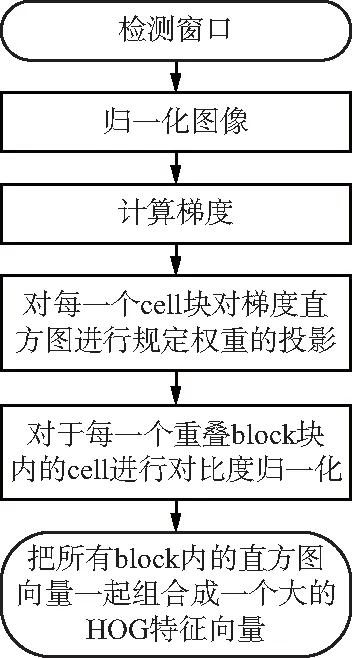
图1 HOG特征提取流程
颜色空间标准化:颜色空间标准化是为了能够减小光照的影响;调节图像的对比度,来减小局部的阴影和光照变化的影响;由于颜色信息对特征提取的贡献很小[16-19],通常转换成灰度图,即:
Gray=0.3×R+0.59×G+0.11×B,Gamma压缩公式:
Y(x,y)=I(x,y)γ,通常γ=0.5。
计算目标区域中每个像素的梯度(包括梯度大小和方向),获得轮廓信息,减小光照的干扰。
图像中像素点(x,y)的梯度为:
Gx(x,y)=H(x+1,y)-H(x-1,y),
Gy(x,y)=H(x,y+1)-H(x,y-1),
式中,Gx(x,y),Gy(x,y),H(x,y)分别是像素点(x,y)处的水平方向梯度、垂直方向梯度和像素值。
像素点(x,y)处的梯度幅值和方向分别为:
将目标区域划分成小单元,并计算出每个单元的梯度直方图。为局部图像区域提供一个编码,并减弱行人的姿势和外观的敏感性。
把每个单元组合成较大的块(Block)。串联块内所有单元的特征,得到这个块的HOG特征。归一化梯度强度,进一步地减少光照、阴影和边缘的影响。
将所有Block的HOG特征依次串联,得到该目标的HOG特征。
3 实验结果分析
本算法采用VS2019和OpenCV实现。算法流程如图2所示。
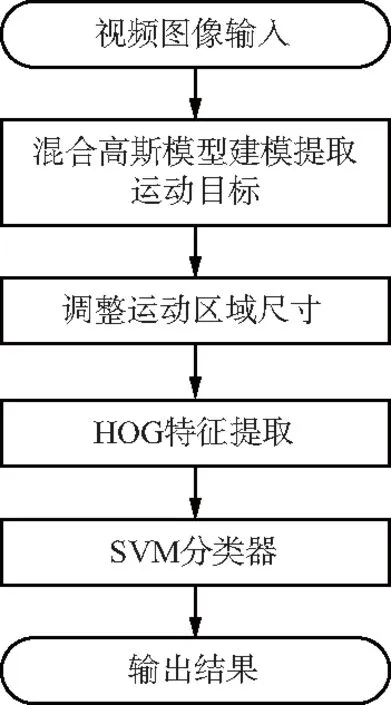
图2 算法流程
本算法检测到的行人用绿色框标记如图3所示。
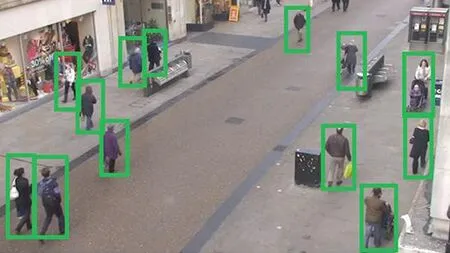
图3 行人检测结果
本文算法基本能检测出视频中的行人,边缘刚进入的行人有漏检的情况,但当行人完全进入画面时依然可以检测到。检测结果对比如表1所示。

表1 检测结果对比
通过实验表明:本文算法提高了检测效率,对于错检率也有所降低,HOG+SVM检测速度约10帧每秒,本文算法检测速度约25~30帧每秒,检测效率增加,基本能够满足实时性的要求。
4 结束语
针对智能监控中行人检测实时性问题,提出了一种利用高斯混合模型进行前景检测来减少HOG特征提取的计算量。该方法先对视频图像进行高斯背景建模,提取运动区域后,由于行人运动速度缓慢或保持静止,所以改进高斯混合模型背景更新的时间,以保证可以检测到运动缓慢或静止的行人。通过混合高斯模型检测出候选区域,调整候选区域的尺寸为HOG检测窗口大小,提取HOG特征,从而减少了HOG特征提取的计算量,检测速度和效率有所提高。实验结果显示,采用混合高斯模型来减少特征提取窗口的方法有较好的行人检测效果,实时性好,基本可应用于实时检测的场合。
猜你喜欢
数学小灵通(1-2年级)(2024年4期)2024-05-14 09:30:52
意林(2021年5期)2021-04-18 12:21:17
小学生学习指导(低年级)(2019年6期)2019-07-22 03:33:10
扬子江(2019年1期)2019-03-08 02:52:34
电子制作(2018年19期)2018-11-14 02:37:08
小天使·一年级语数英综合(2017年6期)2017-06-07 23:51:16
自动化学报(2017年11期)2017-04-04 02:52:58
四川师范大学学报(自然科学版)(2015年2期)2015-02-28 14:07:36
噪声与振动控制(2015年4期)2015-01-01 07:08:21
上海理工大学学报(2012年2期)2012-03-20 13:54:30
