
新能源汽车节能控制器的设计与实现
2020-09-23 08:06冒兴峰罗鹰王钰明
现代电子技术 2020年18期
冒兴峰 罗鹰 王钰明


摘 要: 传统设计方法控制器功率匹配结果无法达到好的节能效果,为解决这一问题,提出新能源汽车节能控制器的设计与实现。在控制器模块设计上,选用AT89C51单片机存放各种程序运行标志和程序数据。在控制器功能设计上,采用模块化程序查找故障。由此,完成新能源汽车节能控制器的设计。依据实验条件,搭建控制器实验平台,并给出控制器相关参数。在H模式下,分别计算传统控制器设计方法与新能源汽车节能控制器的功率匹配结果,是否能够达到规定的节能指标。实验结果表明,传统设计方法功率匹配结果为65%,低于节能指标,所提方法功率匹配结果达到90%,高于节能指标,符合设计需求。
关键词: 新能源汽车; 节能控制器; 控制器设计; 参数设置; 功率匹配; 比较分析
中图分类号: TN245?34; TP31.2 文献标识码: A 文章編号: 1004?373X(2020)18?0111?03
Abstract: A design and implementation of energy?saving controller for new energy vehicles are proposed to improve the energy saving effect of the power matching result of the controller in the traditional methods. In the design of controller module, AT89C51 single chip microcomputer is selected to store various program running signs and program data. In the design of the controller function, the modular program is used to detect malfunction. Thus, the design of energy saving controller for new energy vehicles is completed. The experimental platform of the controller is built according to the experimental conditions, and the relevant parameters of the controller are given. In H mode, the power matching results of the traditional controller design method and the new energy vehicle energy saving controller is calculated, respectively, so as to determine that whether the specified energy saving index can be achieved. The experimental results show that the power matching result of the traditional design method is 65%, which is lower than the energy saving index. The power matching result of the proposed method is 90%, which is higher than the energy saving index and meets the design requirements.
Keywords: new energy vehicles; energy saving controller; controller design; character setting; power matching; comparison analysis
0 引 言
新能源汽车节能控制器是以反电势来平衡外加电压的。当转子转速逐渐增大时,控制器的启动电流就会增大。电流增大会加重控制器前面的开关电器负荷,严重时会危害汽车的安全运行[1]。在以往的实践中,为了解决这一问题,采用了降压启动技术,降低加在定子绕组的电压,但是在使用的过程中仍然会出现以下几个问题:
1) 一般会采用接触器来切换电压,以达到降压的目的;
2) 在启动时,存在二次冲击电流,导致控制器堵转;
3) 在启动时,控制器是带载切换的,容易导致控制器拉弧损坏。
为此,本文提出新能源汽车节能控制器的设计与实现。按照汽车节能控制器设计要求,将设计方案分成几大模块。为达到控制器便携性要求,需要设计数据掉电保护电路以适应电池供电状况。在汽车节能控制器功能设计上,采集制动踏板、油门踏板、离合器位置等模拟信号。最后,通过实验验证所提方法的合理性。
1 控制器模块设计
控制器选用AT89C51单片机,具有低功耗掉电模式,与工业标准的MCS?51指令集兼容的特点[2]。快闪存储器与8位CPU组合是以单个芯片的方式。芯片数据存储器分配内容:AT89C51单片机内有256个数据存储器单元,低区为128 B,高区为128 B,属于特殊功能寄存器区[3]。在低区时,地址为4组工作寄存器区;在高区时,地址为2组工作寄存器区[4]。
各单元具体分配内容:20H地址单元是用于存放各种程序运行标志,包括油门踏板启动标志和中断程序执行标志;30H地址单元是用于存放程序數据,程序数据包括汽车速度数据和油门踏板数据;60H地址单元是作为堆栈使用[5]。
芯片存储器接口电路地址分配内容:
1) A:芯片扩张数据8255可编程并行I/O接口片选地址为9000h~9FFFh;
2) B:芯片扩张数据8255可编程并行I/O接口片选地址为A000h~AFFFh。
8255芯片接口电路如图1所示。
电磁阀控制是通过开关量信号输出控制的,在电路中扩展8255芯片,该芯片是由Intel公司生产的I/O接口芯片,共有3个8位的并行I/O接口[6]。
程序存储器选用EPROM产品,该产品具有在线擦除、改写的特点,不需要专用电源,但不能直接用单片机系统的5 V电源。故利用选通AT89C51单片机信号,将AT89C51单片机存储容量[7]设置为32 KB。当PSEN引脚电平有效即可以读取AT89C51的指令码,AT89C51接口电路见图2。
A/D芯片与CPU连接后,具体工作过程如下:
1) CPU发出指令,A/D芯片工作[8]。
2) A/D芯片转换需要时间,采用专门的信号输出线才能得到转换结果。EOC引脚是AT89C51单片机用于判断转换是否结束的。当A/D芯片发出结束转换信号,CPU会在响应中断后读入数据。
3) AT89C51单片机有8路模拟输入端,可以完成A/D转换,主要作用是控制AT89C51工作步骤。考虑到新能源汽车速度数据等信号的复杂性,控制器增加了串行通信部分。当串行通信的线路连接时,集成电路芯片,用5 V电源实现TTL电平与EIA RS电平之间的转换。其他电器参数设置:EIA RS终端一侧的电容C不能超过2 500 pF。开路电压不能超过25 V。至此,完成新能源汽车节能控制器模块设计。
2 控制器功能设计
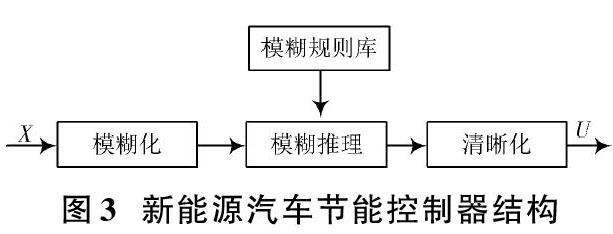
新能源汽车节能控制器功能设计采用模块化程序,这样易于查找故障,其结构见图3。
控制器把各个模块的语言变量的语言值转化为某适当论域上的模糊子集。语言变量为输入输出变量,当控制器稳态运行时,要先计算输入有功功率降低电压,再以2次输入功率的差值为依据,判断电压降低等级。在保持速度不变的情况下,使控制器的输出功率达到最小。在选取语言变量值时,要依据模糊概念,选用比7个语言变量值更多的语言变量值,根据控制器中[ΔP]的模糊语言变量,将控制器大小量化为9个等级,表达式为:
式中,[ΔP]表示语言变量。
完成语言变量值选取后,要求取控制量,计算公式为:
式中:[ΔU]为控制量;[R]为各个关系矩阵。当输入功率的变化为正数时,会降低电压,此时控制器会从正向搜索;当输入功率为负数时,会抬高电压,控制器从反向搜索;当输入功率变化较小,电压幅度比较平稳,保证收敛到最小功率运行点[9]。
综上可知,由于模糊化工作量大,在矩阵运算时,要离线完成计算工作,避免系统会受实时计算的影响,而无法完成矩阵运算。为确定控制器输入量的量化等级与输出控制量的量化等级关系,依据模糊控制列表,求出计算机中离线的控制量[10]。求出量化等级后,采用表决方法得到模糊控制的控制表,如表1所示。
得到控制列表要先置入内存中实时查表使用,完成新能源汽车节能控制器功能设计。
3 实验分析
为验证新能源汽车节能控制器设计的合理性,依据实验条件搭建控制器实验平台,为避免上电时,因电流过大导致不必要的故障,设置预充电路。实验控制器主要参数见表2。
功率模式选为H模式,控制器转速选为2 200 r/min。按照控制器要求将控制电流设置为630 mA,主泵匹配功率设置为100%。实验中,要分别记录实际转速是否会随着控制器负荷率的变化而变化,得到的控制器匹配功率见图4和图5。
在H模式下,因为控制器可以根据发动机掉速情况调节泵扭矩阀,所以使用本实验方法能够保证实际转速与设定转速相同,获得平稳、规律的曲线图。在工作中,发动机实际转速是不稳定的,当转速为1 750 r/min时,电流为0.1,最大功率的主泵匹配功率为90%,高于节能指标,可以达到较好的节能效果。这是因为通过控制转速感应,将发动机转速自动恢复到原来的工作转速。而使用传统方法获得的曲线图波动较大,无法调节发动机掉速情况,当转速为1 750 r/min时,电流为0,最大功率的主泵匹配功率为65%,可见传统方法无法达到较好的节能效果。综上所述,所构建的新能源汽车节能控制器设计方法相比传统控制器设计方法的节能效果更好,更符合设计需求。
4 结 语
本文选用AT89C51单片机和8255芯片来提高新能源汽车控制器的性能。在控制器功能的设计上,采用模块化程序查找故障,并依据模糊规则,计算模块控制量。由此,完成新能源汽车节能控制器的设计与实现研究。在实验中,为证实所建设计方法的合理性,搭建实验平台,分别测试2种设计方法的节能效果。实验结果表明所构建设计方法更符合设计需求。
参考文献
[1] 邱美涵,王晓琳,卞皓.基于AUTOSAR的电动汽车驱动电机控制系统设计与实现[J].汽车工程,2018,40(6):659?665.
[2] 陆广华,田爱军,王德铭.混合动力汽车发动机节能控制器的设计与实现[J].现代电子技术,2017,40(6):84?87.
[3] 陈哲明,张博涵,陈宝,等.独立驱动电动汽车驱动防滑控制的优化研究[J].机械设计与制造,2017(11):67?70.
[4] 王义龙,赵海森,霍承祥,等.抽油机电动机断续供电节能技术断电时刻判定方法[J].电力自动化设备,2017,37(11):182?186.
[5] 钟森鸣,黄坚,吴嘉健,等.新能源汽车动态工况EMI测试系统构架设计与关键技术分析[J].中国测试,2017,43(8):76?79.
[6] 刘宗巍,赵福全,陈嘉瑶.中国新能源汽车产业地方保护问题及对策研究[J].科技管理研究,2018,38(7):136?141.
[7] 杨蔚林,赵若汀.我国新能源汽车法律制度中的四个矛盾及其解决[J].河北法学,2018,36(2):47?61.
[8] 马渝翔,王开,吴哲,等.新能源汽车变速器在线加载试验台设计[J].机床与液压,2017,45(22):1?4.
[9] 周琪,安海云,段梅梅,等.计及电动汽车充电桩无功响应能力的电网节能降损控制方法[J].电力系统及其自动化学报,2017,29(5):129?134.
[10] 张利鹏,李亮,祁炳楠.轮毂电机驱动电动汽车侧倾稳定性解耦控制[J].机械工程学报,2017,53(16):94?104.
猜你喜欢
科学与财富(2016年15期)2016-11-24
大经贸(2016年9期)2016-11-16
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
电脑知识与技术(2016年22期)2016-10-31
企业导报(2016年13期)2016-07-19
科技与创新(2015年23期)2015-12-08
江西通信科技(2015年3期)2015-12-05
山西大同大学学报(自然科学版)(2014年6期)2014-01-23
