
基于高光谱遥感处方图的寒地分蘖期水稻无人机精准施肥
2020-09-20 13:25于丰华曹英丽许童羽郭忠辉王定康
农业工程学报 2020年15期
于丰华,曹英丽,许童羽,郭忠辉,王定康
·农业航空工程·
基于高光谱遥感处方图的寒地分蘖期水稻无人机精准施肥
于丰华1,2,曹英丽1,2,许童羽1,2※,郭忠辉1,王定康1
(1. 沈阳农业大学信息与电气工程学院,沈阳 110866;2. 辽宁省农业信息化工程技术中心,沈阳 110866)
分蘖期根外追肥是水稻生产的重要田间管理环节,也是水稻生长中的第一个需肥高峰期,追肥效果直接影响分蘖数以及中后期长势。为了探究利用无人机遥感构建施肥量处方图指导农用无人机对分蘖期水稻精准追肥,在保障水稻产量的前提下降低化肥施用量,该研究在水稻分蘖期追肥窗口期,利用无人机遥感诊断与农用无人机精准作业相结合,采用无人机高光谱技术建立水稻分蘖期施肥量处方图,结合农用无人机作业参数对待施肥地块进行栅格划分,确定精准施肥量,并通过农用无人机进行精准施肥。结果表明:利用特征波段选择与特征提取的方式在450~950 nm范围内共提取5个水稻高光谱特征变量用于水稻氮素含量的反演;利用粒子群优化的极限学习机(Particle Swarm Optimization-Extreme Learning Machine,PSO-ELM)构建的水稻氮素含量反演模型效果要好于极限学习机(Extreme Learning Machine,ELM)反演效果,模型决定系数为0.838;结合待追肥区域反演氮素含量(N),标准田氮素含量(std)、氮肥浓度()、水稻地上生物量(std)、水稻覆盖度(std)、化肥利用率()及转化率()等构建了农用无人机追肥量决策模型,与对照组相比,利用该研究构建的处方图变量施肥方法使氮肥追施量减少27.34%。研究结果可为寒地水稻分蘖期农用无人机精准变量追肥提供数据与模型基础。
无人机;遥感;水稻;高光谱;精准施肥
0 引 言
寒地水稻是寒冷地区水稻的总称,国内主要分布于东北地区。由于气候环境变化较大,寒地水稻在种植模式和田间管理方面与南方水稻不同[1]。北方地区早春气温和土壤温度均偏低,养分释放慢,因此在水稻关键生育期需要根外追肥,以保证水稻的产量和品质[2]。其中分蘖期追肥是寒地水稻田间管理的关键环节,也是水稻整个生长中的第一个需肥高峰期,追肥效果将直接影响水稻分蘖数以及中后期的长势[3]。分蘖期过量追肥容易引起无效分蘖率增加、叶片披垂重叠遮阴等,增加倒伏和病害风险。同时叶片含氮量过高,还会阻碍以氮代谢为主向以碳代谢为主转移,可能延长营养生长期而推迟出穗期,不利于水稻稳产[4-5]。
近年来,水稻生产中利用农用无人机开展追肥作业得到了快速发展,大幅提高了水稻田间管理效率,同时减少了劳动强度、降低了人工成本[6-9]。许童羽等[10]研究了多旋翼农用无人机雾滴在水稻冠层的分布规律,表明农用无人机喷施作业雾滴在冠层上分布较为均匀,能够保证水稻地上植株被药液充分附着。张建桃等[11]分析了农用无人机喷施雾滴与水稻叶面接触角对沉积量的影响,表明接触角的变化趋势与雾滴高度和接触面直径及二者的增长速率密切相关。李继宇等[12]研究了农用无人机喷雾粒径对水稻冠层喷施效果的影响,表明农用无人机喷施雾滴在水稻冠层的分布均匀性和穿透性都较为理想,且雾滴粒径越小,水稻冠层单位面积药液沉积量越大,分布均匀性越好。陈盛德等[13]研究了小型无人直升机喷雾参数对水稻冠层雾滴沉积效果的影响,揭示了农用无人机作业参数对水稻雾滴沉积分布结果的影响,并从风场方面推测了雾滴沉积对农用无人机作业合理喷施、提高喷施效率的影响,为农用无人机进行精准追肥作业提供了参考。
目前,水稻无人机追肥作业的追肥决策主要依靠田间管理人员的经验,缺乏有效追肥决策依据[14-16]。随着无人机低空遥感技术的快速发展,国内外研究人员在水稻氮素营养无人机遥感诊断方面开展了相应的研究。秦占飞等[17]利用无人机高光谱遥感技术构建了水稻叶片氮素含量反演模型,为区域尺度水稻精准作业提供了一定的模型基础。Din等[18]利用构建高光谱指数的方式实现数据降维,构建了基于768、750 nm波段的比值型植被指数,用于估算水稻冠层氮素含量。裴信彪等[19]在4种氮素水平下,利用无人机遥感平台研究了RVI、NDVI等植被指数在水稻不同生育期的变化趋势,为水稻长势无人机遥感诊断提供了数据参考。Stavrakoudis等[20]通过多元线性回归的方法在水稻分蘖期、孕穗期建立了氮素含量反演模型,能够辅助开展水稻营养诊断。王树文等[21]利用高光谱成像技术,根据植被指数与氮素含量相关性,建立了单变量预测模型服务于水稻精准追肥管理。Tsujimoto等[22]运用无人机低空遥感平台获取旱直播水稻的土壤养分信息用于指导氮肥决策,有效减少了化肥的过量施用。许童羽等[23]研究了基于遗传算法优化极限学习机的水稻叶片尺度的缺氮量高光谱遥感诊断模型。臧英等[24]利用无人机搭载多光谱相机获取水稻重要生育期的冠层多光谱图像,融合积温数据建立了基于标准种植比值法的水稻关键追肥节点的追施量决策模型,在减少追肥量的同时,保证产量稳定。已有的水稻营养诊断研究大多以反演氮素含量为主,缺少田块尺度的营养诊断与无人机精准喷施相结合的研究与应用,所建立的水稻养分反演模型难以直接指导水稻田间追肥作业[25-27]。本研究将水稻分蘖期无人机追肥量遥感诊断与农用无人机精准作业相结合,运用无人机高光谱技术建立水稻分蘖期追肥量处方图,在此基础上结合农用无人机作业参数,对待追肥地块进行栅格划分,确定每一个栅格追肥作业喷施量,并通过农用无人机进行精准追肥,以期为寒地水稻分蘖期无人机精准变量追肥提供数据与模型基础。
1 材料与方法
1.1 研究区概况
试验地点位于辽宁省沈阳市沈北新区柳条河村(北纬42°01′17.16″,东经123°38′14.57″),属于典型的寒地水稻种植区,试验品种为辽宁地区广泛种植的“粳优653”品种。试验于2019年5-11月进行,水稻移栽前和收获后进行耕层土壤采样;返青期、分蘖期进行无人机遥感追肥诊断与农用无人机变量施肥;水稻成熟后进行小区测产。
试验小区设计为4个氮肥梯度处理(图1),分别为CK、N1、N2、N3,各小区之间采用田埂进行分隔。其中CK为对照组,即不施用基肥;N1为当地标准氮基肥施用水平,氮肥施用量为45 kg/hm2,N2为低氮施肥水平,施用量为22.5 kg/hm2;N3为高氮施肥水平,施用量为67.5 kg/hm2;磷肥和钾肥的施用按照当地标准施用量进行,其中磷肥标准施用量为51.75 kg/hm2,钾肥标准施用量为18 kg/hm2。在试验小区相邻田块,另外设置传统人工施肥方式管理小区(T)和农学专家推荐施肥方式管理小区(S),用于施肥效果分析比较。基肥施入之前,在每个小区按5点采样法采集土样,采集深度为0~50cm,分析土壤中营养元素含量:采用微量扩散法测定土壤的硝态氮质量分数,为3.16~14.82 mg/kg;采用火焰光度法测定土壤速效钾质量分数,为86.83~120.62 mg/kg;采用Bray1法测定土壤有效磷质量分数,为3.14~21.18 mg/kg;采用碱解扩散法测定土壤全氮质量分数,为104.032~127.368 mg/kg;采用半微量凯氏法测定土壤全氮质量分数,为0.154~0.162 g/kg;采用重铬酸钾—外加热法测定土壤有机质质量分数为15.8~20.0 g/kg。其他田间管理按当地正常水平进行。

注:CK为对照组;N1氮肥施用量为45 kg·hm-2,N2氮肥施用量为22.5 kg·hm-2;N3氮肥施用量为67.5 kg·hm-2;T为传统人工施肥方式管理小区;S为农学专家推荐施肥方式管理小区。
1.2 数据获取
1.2.1 无人机高光谱遥感影像获取
无人机高光谱平台采用深圳大疆创新公司的M600 PRO六旋翼无人机,高光谱成像仪选用四川双利合谱公司的GaiaSky-mini内置推扫式机载高光谱成像系统,高光谱的波段范围为400~1 000 nm,分辨率为3.5 nm,有效波段数为170个,单幅影像获取时间为15 s,帧速为162帧/s,无人机飞行高度为100 m,共获取40景水稻冠层无人机高光谱遥感影像。由于水稻分蘖期稻田内水体面积很大,若采用传统的高光谱采集时间会受到镜面反射等干扰,造成光谱污染。因此本研究将无人机高光谱数据采集时间选择在08:00-08:30之间,同时为了降低由于太阳高度角变化对高光谱影像采集造成的测量误差,无人机高光谱影像获取过程中每隔5 min进行1次定标白板(反射率>99%)和仪器背景暗噪声光谱数据的采集,用于后期计算高光谱影像反射率。同时在每景高光谱采集区域内放置一块1.5 m×1.5 m、反射率为60%的漫反射板,用于后期的反射数据校正。高光谱数据采集期间,同步开展田间虫害、病害等级调查,试验小区在高光谱数据采集之前未发生虫害和病害情况,因此本研究试验小区从插秧到遥感数据采集这段时间内未喷施任何药剂,所获取的光谱数据没有受到病害、虫害、杂草等其他外界胁迫的干扰。利用机载高光谱成像仪配套的SpectraVIEW软件对所获取的无人机高光谱遥感影像进行镜头、均匀性、反射率等预处理,最终获得用于反演建模的试验小区高光谱反射率影像。
1.2.2 水稻叶片氮素含量测定
对每个小区中采样点水稻进行整穴破坏性取样,带回实验室后将该穴水稻所有新鲜叶片剪下置于烘箱中以120 ℃杀青60 min,再以65 ℃烘干至恒质量。称量后将其粉碎,把研磨好的粉末采用凯氏定氮法检测叶片的含氮量(mg/g)。
1.2.3 水稻产量测定
收获时每个试验小区取2 m×2 m范围的全部水稻进行测产。
1.2.4 稻田土壤氮含量测定
在每个小区按5点采样法采集土样,采集深度为10~20 cm,将5点的土壤混合,过2 mm筛后装入自封袋,带回实验室将其风干后过0.15 mm筛,装回原自封袋中备用。土壤全氮先用浓硫酸和双氧水混合消煮,再用半微量凯氏法测定。本研究分别于底肥施用之前和水稻收获之后测定试验小区土壤氮含量用于辅助分析变量追肥效果。
1.3 研究方法
1.3.1 无人机高光谱遥感影像解混
无人机高光谱遥感影像空间分辨率与光谱分辨率均比较高,而分蘖期稻田还没有封行,一景高光谱影像既包含水稻,又包含水体、土壤等干扰信息,因此需要对无人机高光谱遥感影像进行解混,提取水稻高光谱信息用于后续建模。本研究首先采用最小噪声分离法(Minimum Noise Fraction Rotation, MNF)分离数据中的噪声,再利用纯净像元指数法(Pixel Purity Index, PPI)提取水稻的高光谱反射率曲线,并构建地物端元波普库,最后采用正交子空间投影方法(Orthogonal Subspace Projection,OSP),对无人机高光谱遥感影像进行解混,提取水稻的高光谱信息。
1.3.2 水稻氮素含量高光谱遥感建模方法
经过解混获取的水稻高光谱信息相比于宽波段的多光谱数据在光谱维度上具有连续特性,能够表征更多的水稻信息,但高光谱数据同时也包含了大量的冗余信息,会造成建模精度和效率的降低。本研究分别采用主成分分析法(Principal Component Analysis,PCA)与红边特征反射率相结合的方式对400~1 000 nm范围的高光谱信息进行降维。将降维后的数据结果作为极限学习机(Extreme Learning Machine,ELM)与粒子群优化的极限学习机(Particle Swarm Optimization algorithm is used to optimize the ELM, PSO-ELM)的氮素浓度高光谱反演模型的输入,构建水稻分蘖期叶片氮素浓度反演模型,为建立水稻追肥量处方图提供依据。
1.3.3 水稻农用无人机氮肥追施量精准决策方法
在试验地点相邻田块按照水稻栽培专家给出的田间管理方案设置一块生产标准田作为参考标准,将同时期标准田内水稻平均氮浓度作为氮肥追施目标,记为std(mg/g),将待追肥水稻氮素浓度的反演值记为N(mg/g)。则分蘖期水稻缺氮量N(mg/g)为
N>0时表示目前该位置的氮素含量低于标准田,需要进行外部喷施追肥,N≤0时表示目前该位置不要进行外部喷施追肥。
1.3.4 农用无人机追肥量处方图生成方法
获取水稻单位面积缺氮量后,将缺氮量转换为处方图,指导农用无人机进行精准追肥作业。由于无人机高光谱遥感影像在每一个像素点都包含有一条高光谱反射率曲线,因此运用高光谱遥感影像可以针对每一像素点都生成一个追肥量。而由于追肥作业的农用无人机喷幅宽窄的限制,无法针对田块内部每一个像素点的缺氮量进行精准喷施,因此本研究结合农用无人机喷幅(m)和速度(m/s)按照每秒对追肥地块进行栅格划分,每个喷施栅格面积大小为喷幅×速度(m2),针对每个栅格生成一个氮肥追施量,追肥量UAV(mL)计算方法如公式(2)所示。
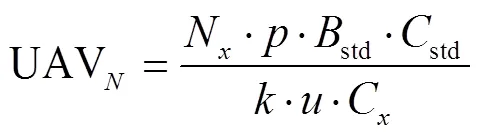
式中为无人机药箱中氮肥浓度,mg/mL;std为标准田单个栅格面积范围内水稻地上生物量,标准田的生物量测量采用5点采样法,计算单位面积生物量,g/m2;std、C分别为标准田、待追肥田栅格面积内水稻覆盖度,覆盖度计算通过对无人机获取的正射影像进行分类,提取水稻像元个数占影像所有像元的比;为化肥利用率,为化肥转化率,、为经验值。本研究参考侯彦林等[28]针对氮肥利用率和转化率的研究结果,设置为0.4,为0.6。
1.4 模型精度与效果评价
本研究使用均方根误差(RMSE)和模型决定系数(2)作为无人机高光谱反演模型的评价标准,利用大疆精灵4 RTK无人机获取带有空间信息的试验田正射影像,确定追肥田块的每一个追施栅格的实际位置,采用PID算法通过控制药液泵工作电压,实现变量喷施。农用无人机喷施过程中,地面同时布置雾滴测试卡,计算雾滴覆盖度等参数,作为评价农用无人机水稻分蘖期变量追施效果。
2 结果与分析
2.1 数据分析
2.1.1水稻氮素样本量
本研究共采集120组水稻氮含量测试数据样本,根据Kennard-Stone算法将样本按照训练集与验证集3:1的比例进行划分,随机选取其中的90组作为建模数据集,另外30组为验证数据集。样本集的氮素浓度最大值为4.874 mg/g,氮素浓度最小值为1.060 mg/g,变异系数为0.32。
2.1.2 高光谱数据分析
无人机遥感平台获取的稻田高光谱影像质量是开展追肥量决策的重要前提,高光谱虽然具有较高的光谱分辨率,但在数据获取过程中稻田内地物的高光谱信息在噪声的影响下会造成数据失真。因此本研究采用“均匀区域划分和光谱维去相关的高光谱图像噪声评估方法评价所采集无人机高光谱遥感影像的噪声水平,结果如图2所示。由图2结果可知,在400~450、950~1 000 nm两个波段范围噪声标准差均超过了0.01,而其余波段的噪声标准差远低于0.005,表明这2个波段的光谱信息存在着较大的数据噪声,由于研究选用的高光谱成像仪能够获取高光谱反射率波段范围在400~1 000 nm内,而上述2个波段范围正好处于高光谱采集范围的2个边界,信噪比较低。因此400~450、950~1 000 nm两个光谱区间内的高光谱反射率具有较大的数据误差。为了降低噪声对模型的影响,保证建模效果,本研究选择450~950 nm的波段范围作为氮素含量遥感诊断的基础数据。

图2高光谱噪声标准差估计结果
2.2 水稻分蘖期高光谱影像解混结果
水稻无人机高光谱遥感影像解混需要获取稻田内地物端元高光谱信息,本文通过最小噪声分离与纯净像元指数法提取稻田内地物端元高光谱信息。本文采用正向MNF变换提取高光谱影像中有效的数据维度,结果如图3所示。由图3可知,横坐标高光谱特征维度为5时,纵坐标光谱特征值不再下降并保持稳定,因此本研究采用MNF变换能够将高维无人机影像数据采用5维特征进行表示,为后续光谱解混降低了模型输入维度。

图3 最小噪声分离法高光谱特征数量提取结果
利用MNF变换后的结果作为纯净像元提取的输入,设定迭代次数为10 000次,由于水稻分蘖期内稻田有水层覆盖,稻田内地物主要由水稻、水体土壤混合物构成,其余干扰地物占比很少,因此本研究主要针对上述2种地物进行端元高光谱提取,提取结果如图4所示。
由地物端元光谱可知,红色高光谱反射率曲线的特征既不是纯土壤、也不是纯水体的反射率曲线,这是由于太阳光照射到水层后部分会被水层反射,另一部分透过水层后到达下面的土壤再次发生反射,最终形成两者混合光谱。由于水稻田分蘖期栽培管理的实际需求,土壤将被水层完全覆盖,不存在单纯的土壤或水体地物,因此本研究将水体、土壤混合状态设置为一类地物。在提取稻田地物端元高光谱反射率曲线的基础上,采用正交子空间投影丰度反演方法,从无人机高光谱影像中提取水稻的高光谱信息,结果如图5所示。
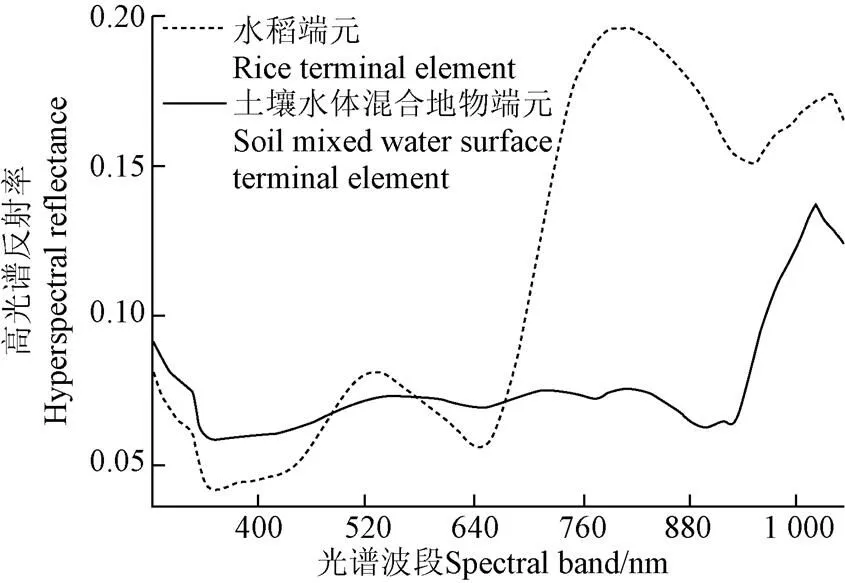
图4 地物端元高光谱提取结果
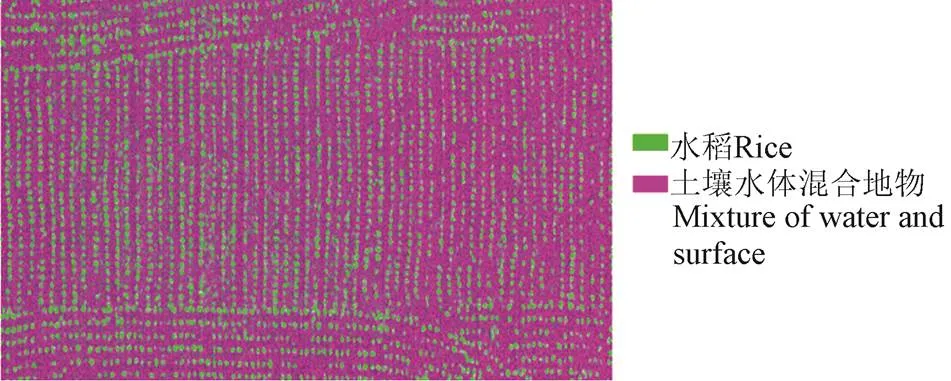
图5 无人机高光谱影像解混结果
2.3 水稻高光谱特征提取
首先对450~950 nm范围的高光谱按照蓝色光区域、绿色光区域、红色光区区域、红边区域、近红外区域5个不同特征区域进行分段划分,再利用PCA进行特征提取。本研究将高光谱分成5段,分别为450~500、500~600、600~690、690~760、760~950 nm。其中690~760 nm范围内是红边位置所在区间,而红边位置对于作物的长势、胁迫等十分敏感,因此在该区域,本研究提取高光谱红边位置的反射率作为特征,其余4个波段范围采用PCA的方法每个范围提取1个高光谱特征,400~1 000 nm范围内共提取5个高光谱特征。
2.4 水稻氮素含量PSO-ELM反演结果
将提取的5个水稻高光谱特征参量分别作为ELM、PSO-ELM模型输入,建立氮素含量反演模型。通过反复试验,设置PSO优化算法模型参数为:最大迭代次数为300,初始种群数量为25,惯性因子为0.9~0.3递减,学习因子C1和C2均为2,粒子最大速度为0.5。采用ELM反演方法建立的水稻氮素含量反演模型的2为0.700 8,RMSE为1.826 6,而采用PSO-ELM反演方法建立的水稻氮素含量反演模型的2为0.838,RMSE为0.466,所以PSO-ELM的氮素含量反演效果要优于ELM(图6)。
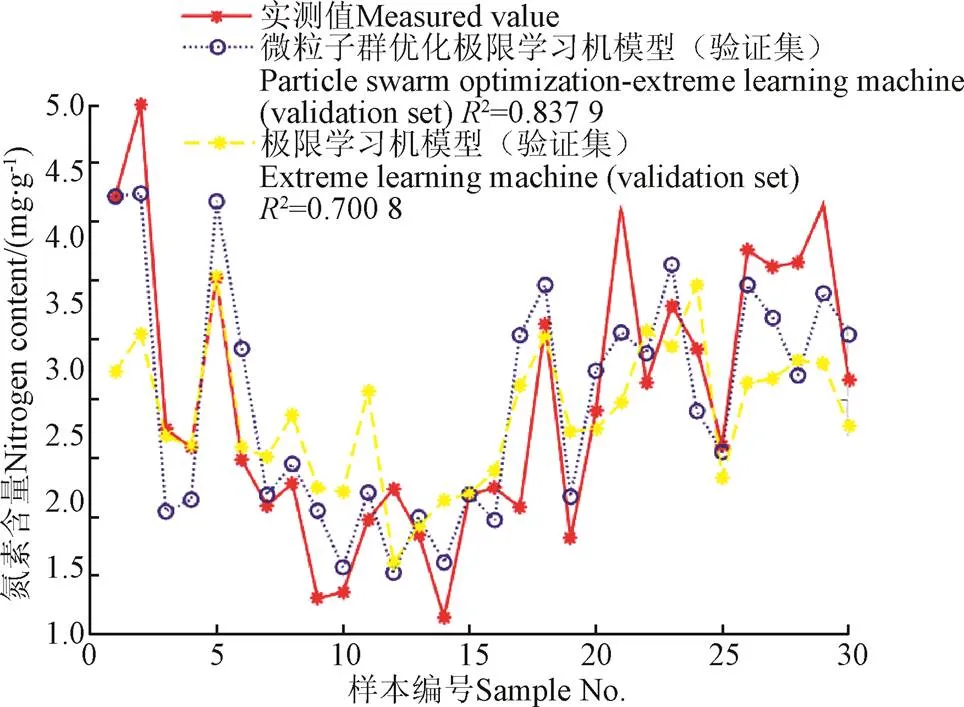
图6 水稻氮素含量反演结果
2.5 水稻分蘖期无人机追肥量处方图生成
无人机追肥作业需要考虑农用无人机的飞行速度与喷幅等参数,同时需要考虑药液泵的响应时间。由于无人机高光谱遥感影像在二维空间上是一条连续的反射率信息,每一个像素点均可以反演一个追肥量。实际作业过程中,农用无人机无法针对每一个像素点进行追肥喷洒作业,需要将高光谱遥感影像反演结果进行栅格分割。通过试验发现本研究所选用药液泵的最快响应时间为1 s,满足一般作业要求,因此农用无人机追肥的最小变量栅格为喷幅乘以速度,本研究选所用无人机的有效喷幅为4 m,飞行速度为5 m/s,因此本研究最小追肥变量栅格为20 m2。结合差分GPS信息构成了农用无人机变量追肥处方图(图7)。通过变量追肥处方图可知,本研究试验田按照农用无人机能够识别的最小栅格共划分了253个(23×11)农用无人机追肥喷施栅格。通过追肥模型计算后,每一个栅格给出一个追肥量。高氮处理的基肥小区,其追施量变化较为平缓,而未施用基肥的小区其追施量则变化较大,这主要由于未施用基肥,水稻生长初始氮肥主要依靠土壤自有肥力,而由于稻田内土壤的空间差异性、稻田地势高低、灌水条件等因素的影响,造成了水稻个体长势的不同,从而使追施量的变化较大。而高氮处理的基肥小区由于土壤肥力较为充足,其他因素的影响相对较小,因此整体追肥量的变化相对比较平缓。

图7 农用无人机追肥量处方图
2.6 农用无人机精准追肥与效果评价
2.6.1 农用无人机精准追肥作业
获取无人机追肥处方图后,利用“云鸮-100”单旋翼农用无人机作为试验平台,根据处方图每一个追肥栅格的4个顶点GPS坐标及追施量,生成农用无人机追肥量作业航点数据,并通过地面站写入农用无人机飞控中,设定飞行速度为5 m/s,喷幅为4 m/s。农用无人机飞控系统根每秒按照写入的喷施量执行1次喷施控制,实现农用无人机水稻分蘖期精准追肥作业。
2.6.2 农用无人机喷施效果
利用雾滴测试卡分别在CK、N1、N2、N3四个小区内按照五点采样法布置20个雾滴采样点。其中N3小区内的1个雾滴采样点受到无人机旋翼风场影响,雾滴采样卡跌落,因此共采集了19个有效雾滴采样点的数据用于评估农用无人机精准追肥喷施效果。通过iDASLite软件对雾滴测试卡进行数据分析,结果如图8所示。由雾滴分析结果可知,实际喷施量与追肥量的差异平均值为2 mL/s,其中雾滴测试点追肥决策喷施量与实际回收量差异最大值为5 mL/s。造成追肥量误差的原因主要包括试验当天作业过程中风速的变化、喷施系统的调节控制等多因素影响的。其中风场对雾滴分布的影响相对更大,试验当天瞬时风速在0.03~2.16 m/s之间变化,并且存在旋翼产生的风场与环境风场相叠加的情况,这些因素均会对雾滴沉积造成一定的不确定性。因此未来利用农用无人机精准追肥可尽量选择无风少风的时间段进行作业,促进雾滴沉积。
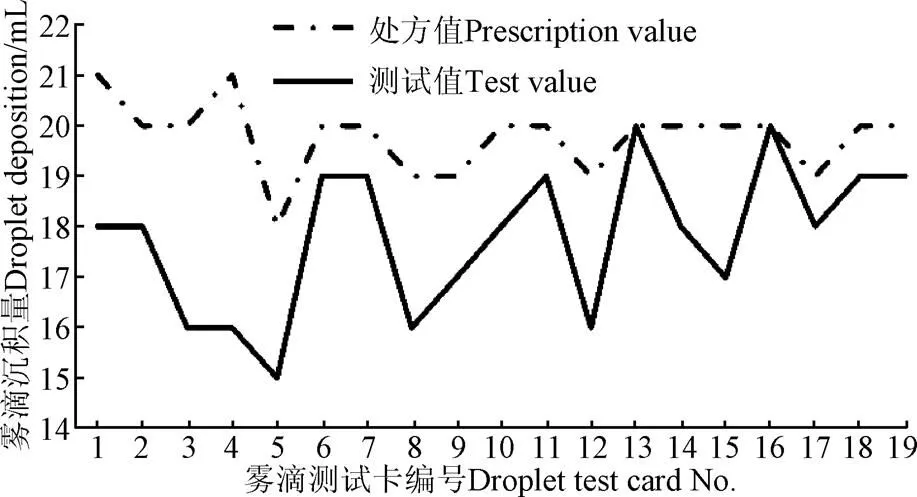
图8 雾滴沉积效果
2.6.3 水稻产量分析
本研究试验小区除分蘖期追肥管理不同外,其他田间管理均保持一致,试验结束后对不同管理方式水稻进行测产,各测试小区的产量如表1所示。

表1 各施肥方式的水稻产量
由产量结果可知,采用无人机变量追肥最终产量与传统追肥方式管理的最终产量基本一致,将本研究总施用化肥量与往年同地块施用化肥量相比,化肥中纯氮用量减少27.34%。
2.6.4 收获后土壤含氮量分析
在水稻收获1周后,分别对试验田土壤进行采样,分析土壤的氮素含量(表2)。本研究主要测量了土壤样品中全氮量和速效氮2种土壤氮素参量,其中土壤全氮量表示土壤中各种形态氮素含量之和,速效氮表示可以直接被植物根系吸收的氮。由表2可知,未施用基肥的小区收获后与移栽前相比全氮量有所增加,标准氮和低氮处理的小区全氮量则有所下降,基肥采用高氮处理的小区全氮量没有变化。这是由于未施用基肥的小区前期由于缺乏足够的氮素营养,其光谱差异较为明显,通过追肥量决策模型能够较为准确的计算追肥量。而标准氮和低氮处理方式的小区,水稻分蘖期高光谱差异并不明显,追肥量决策可能会存在低估的情况,因此在生长过程中除追施氮肥外,还需要从土壤中获取一些氮素作为补充。通过移栽前和收获后的土壤氮含量对比可知,两者的差值在0.006 g/kg左右,说明无人机追肥提供了重要的氮素养分来源。而高氮处理的小区在移栽前和收获后,其土壤氮素含量没有变化,说明在整个生长过程中,利用无人机遥感决策的追肥量是能够满足水稻生长需求的。速效氮作为能够直接被水稻吸收的氮素,在土壤中会与全氮量发生转化,由表2可知,基肥采用低氮处理的小区其速效氮收获后比移栽前增加0.004 g/kg,这是由于决策过程中追肥量存在被低估的情况,水稻需要从土壤中将全氮转换成能够被吸收的速效氮补充一部分氮素来源,从而造成土壤中速效氮含量有所增加,其余基肥处理的小区其速效氮含量差异并不显著。综合分析可知无人机变量追肥对于水稻生长起到了重要作用,在降低氮肥用量的情况下通过变量追肥,整体的氮肥施入量能够有效保证水稻生长。
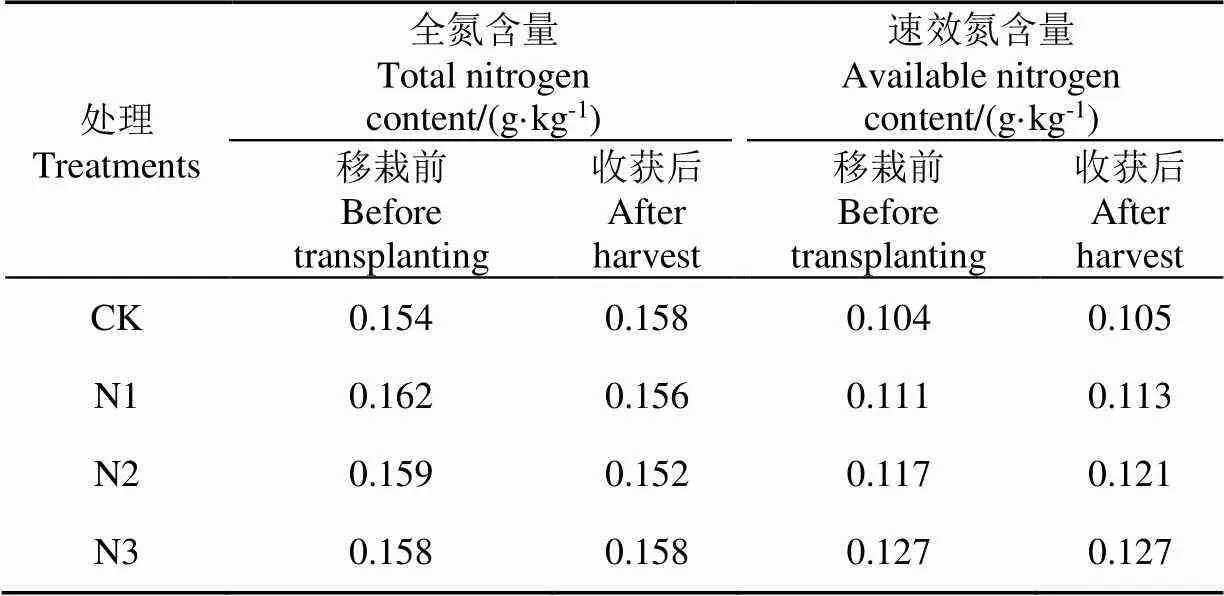
表2 土壤含氮量
3 讨 论
本文以寒地水稻分蘖期农用无人机精准追肥为研究对象,先利用无人机高光谱遥感构建水稻追肥量处方图,再将处方图转换为能够被农用无人机执行的栅格喷施量信息。目前农用无人机水稻追肥处方图大多是以亩为最小追肥决策单位,以面向的区域级别大小的定性式的变量追肥为主,其变量判断标准更多是通过植被指数对不同田块进行分级,根据不同级别设置对应的追施量,这种方法在实际应用上比较容易实现。但对于同一田块内,由于地势、土壤肥力分布、基肥施用、栽培条件等因素造成的关键生育期的需肥差异目前研究较少。生成无人机追肥处方图的核心在于计算水稻的缺氮量,本文采用专家推荐的管理方案设置一块参考田作为水稻缺氮量的决策标准,这种方式在生产中容易实现,但仍然面临人工经验管理的问题。已有部分研究考虑通过水稻临界氮浓度作为氮素营养决策依据[29],而不同品种之间的临界氮浓度曲线的构建也存在一定的困难。因此未来可考虑综合水稻临界氮浓度曲线与生产经验,利用遥感数据,构建“数据-知识”相结合的水稻追肥决策方法,提升农用无人机精准追肥精度。
4 结 论
本文以水稻分蘖期农用无人机精准追肥为研究对象,利用无人机成像高光谱遥感影像通过PSO-ELM建立氮素浓度反演模型,综合考虑农用无人机相关作业参数,结合专家推荐施肥构建追肥标准田,构建无人机精准追肥模型,最终利用农业无人机精准追肥,主要结论如下:
1)采用粒子群优化的极限学习机方法构建的水稻氮素含量反演模型效果较好,模型决定系数2为0.838。
2)结合待追肥区域反演氮素含量(N),标准田氮素含量(std)、氮肥浓度()、水稻地上生物量(std)、水稻覆盖度(std)、化肥利用率()及转化率()等构建农用无人机追肥量决策模型UAV。
3)本研究构建的农用无人机处方图变量施肥方法,氮肥追施量与传统人工施肥相比减少27.34%。
[1] 唐亮,吴东立,苗微,等. 东北地区食物安全可持续发展战略研究[J]. 中国工程科学,2019,21(5):19-27.
Tang Liang, Wu Dongli, Miao Wei, et al. Study on sustainable development strategy of food safety in Northeast China[J]. China Engineering Science, 2019, 21(5): 19-27. (in Chinese with English abstract)
[2] 江琳琳,赵晗舒,杨武,等. 水稻氮利用效率评价及其与产量性状的关系[J]. 沈阳农业大学学报,2019,50(6):641-647.
Jiang Linlin, Zhao Hanshu, Yang Wu, et al. Evaluation of nitrogen use efficiency and its relationship with yield traits in rice[J]. Journal of Shenyang Agricultural University, 2019, 50(6): 641-647. (in Chinese with English abstract)
[3] 郑文汉,齐龙,曹聪,等. 分蘖期深施液体氮肥对水稻分蘖及产量影响[J]. 农机化研究,2019,42(7):160-165.
Zheng Wenhan, Qi Long, Cao Cong, et al. Effects of deep application of liquid nitrogen fertilizer at tillering stage on tillering and yield of rice[J]. Agricultural Mechanization Research, 2019, 42(7): 160-165. (in Chinese with English abstract)
[4] 白由路. 高效施肥技术研究的现状与展望[J]. 中国农业科学,2018,51(11):2116-2125.
Bai Youlu. Current situation and prospect of efficient fertilization technology research[J]. Chinese Agricultural Science, 2018, 51(11): 2116-2125. (in Chinese with English abstract)
[5] 白由路. 植物营养中理论问题的追本溯源[J]. 植物营养与肥料学报,2019,25(1):1-10.
Bai Youlu. Tracing the origin of theoretical problems in plant nutrition[J]. Journal of Plant Nutrition and Fertilizer, 2019, 25(1): 1-10. (in Chinese with English abstract)
[6] 齐兴源,周志艳,李官平,等. 大田作物变量施肥技术国内外研究现状[J]. 贵州农机化,2018,322(2):8-13.
Qi Xingyuan, Zhou Zhiyan, Li Guanping, et al. Research status of variable rate fertilization technology for field crops at home and abroad[J]. Guizhou Agricultural Mechanization, 2018, 322(2): 8-13. (in Chinese with English abstract)
[7] 韩英,贾如,唐汉. 精准变量施肥机械研究现状与发展建议[J]. 农业工程,2019,9(5):1-6.
Han Ying, Jia Ru, Tang Han. Research status and development suggestions of precision variable rate fertilization machinery [J]. Agricultural Engineering, 2019, 9(5): 1-6. (in Chinese with English abstract)
[8] 何勇,彭继宇,刘飞,等. 基于光谱和成像技术的作物养分生理信息快速检测研究进展[J]. 农业工程学报,2015,31(3):174-189.
He Yong, Peng Jiyu, Liu Fei, et al. Critical review of fast detection of crop nutrient and physiological information with spectral and imaging technology[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(3): 174-189. (in Chinese with English abstract)
[9] 兰玉彬,陈盛德,邓继忠,等. 中国植保无人机发展形势及问题分析[J]. 华南农业大学学报,2019,40(5):217-225.
Lan Yubin, Chen Shengde, Deng Jizhong, et al. Development situation and problem analysis of plant protection UAV in China[J]. Journal of South China Agricultural University, 2019, 40(5): 217-225. (in Chinese with English abstract)
[10] 许童羽,于丰华,曹英丽,等. 粳稻多旋翼植保无人机雾滴沉积垂直分布研究[J]. 农业机械学报,2017,48(10):101-107.
Xu Tongyu, Yu Fenghua, Cao Yingli, et al. Vertical distribution of spray droplet deposition of plant protection multi rotor UAV for japonica rice[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(10): 101-107. (in Chinese with English abstract)
[11] 张建桃,曾家骏,尹选春,等. 液滴体积对水稻叶面接触角的影响[J]. 浙江农业学报,2019,31(6):135-144.
Zhang Jiantao, Zeng Jiajun, Yin Xuanchun, et al. Effect of droplet volume on leaf contact angle of rice[J]. Acta Agriculturae Zhejiangensis, 2019, 31(6): 135-144. (in Chinese with English abstract)
[12] 李继宇,兰玉彬,施叶茵. 旋翼无人机气流特征及大田施药作业研究进展[J]. 农业工程学报,2018,34(12):104-118.
Li Jiyu, Lan Yubin,Shi Yeyin. Research progress on airflow characteristics and field pesticide application system of rotary-wing UAV[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(12): 104-118. (in Chinese with English abstract)
[13] 陈盛德,兰玉彬,李继宇,等. 小型无人直升机喷雾参数对杂交水稻冠层雾滴沉积分布的影响[J]. 农业工程学报,2016,32(17):40-46.
Chen Shengde, Lan Yubin, Li Jiyu, et al. Effect of spray parameters of small unmanned helicopter on distribution regularity of droplet deposition in hybrid rice canopy[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(17): 40-46. (in Chinese with English abstract)
[14] 赵小敏,孙小香,王芳东,等. 水稻高光谱遥感监测研究综述[J]. 江西农业大学学报,2019,41(1):1-12.
Zhao Xiaomin, Sun Xiaoxiang, Wang Fangdong, et al. A review of hyperspectral remote sensing monitoring of rice[J]. Journal of Jiangxi Agricultural University, 2019, 41(1): 1-12. (in Chinese with English abstract)
[15] 赵春江. 智慧农业发展现状及战略目标研究[J]. 智慧农业,2019,1(1):1-7.
Zhao Chunjiang. State-of-the-art and recommended developmental strategic objectives of smart agriculture[J]. Smart Agriculture, 2019, 1(1): 1-7. (in Chinese with English abstract)
[16] 唐华俊. 农业遥感研究进展与展望[J]. 农学学报,2018,8(1):167-171.
Tang Huajun. Progress and Prospect of agricultural remote sensing research[J]. Acta agronomica Sinica, 2018, 8(1): 167-171. (in Chinese with English abstract)
[17] 秦占飞,常庆瑞,谢宝妮,等. 基于无人机高光谱影像的引黄灌区水稻叶片全氮含量估测[J]. 农业工程学报,2016,32(23):77-85.
Qin Zhanfei, Chang Qingrui, Xie Baoni, et al. Rice leaf nitrogen content estimation based on hyperspectral imagery of UAV in Yellow River diversion irrigation district[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(23): 77-85. (in Chinese with English abstract)
[18] Din M, Ming J, Hussain S, et al. Estimation of dynamic canopy variables using hyperspectral derived vegetation indices under varying n rates at diverse phenological stages of rice[J]. Frontiers in Plant Science, 2019, 9: 1883.
[19] 裴信彪,吴和龙,马萍,等. 基于无人机遥感的不同施氮水稻光谱与植被指数分析[J]. 中国光学,2018,11(5):144-152.
Pei Xinbiao, Wu Helong, Ma Ping, et al. Spectral and vegetation index analysis of rice with different nitrogen application based on UAV remote sensing[J]. China Optics, 2018, 11(5): 144-152. (in Chinese with English abstract)
[20] Stavrakoudis D, Katsantonis D, Kadoglidou K, et al. Estimating rice agronomic traits using drone-collected multispectral imagery[J]. Remote Sensing, 2019, 11(5): 545.
[21] 王树文,宋玉柱,张长利,等. 东北寒地水稻冠层氮素含量高光谱预测模型[J]. 东北农业大学学报,2017,48(4):82-91.
Wang Shuwen, Song Yuzhu, Zhang Changli, et al. Hyperspectral prediction model of rice canopy nitrogen content in Northeast Cold Region[J]. Journal of Northeast Agricultural University, 2017, 48(4): 82-91. (in Chinese with English abstract)
[22] Tsujimoto Y, Rakotoson T, Tanaka A, et al. Challenges and opportunities for improving N use efficiency for rice production in sub-saharan africa[J]. Plant Production Science, 2019, 22(4): 413-427.
[23] 许童羽,郭忠辉,于丰华,等. 采用GA-ELM的寒地水稻缺氮量诊断方法[J]. 农业工程学报,2020,36(2):209-218.
Xu Tongyu, Guo Zhonghui, Yu Fenghua, et al. Genetic algorithm combined with extreme learning machine to diagnose nitrogen deficiency in rice in cold region[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(2): 209-218. (in Chinese with English abstract)
[24] 臧英,侯晓博,汪沛,等. 基于无人机遥感技术的黄华占水稻施肥决策模型研究[J]. 沈阳农业大学学报,2019,50(3):324-330.
Zang Ying, Hou Xiaobo, Wang Pei, et al. Study on Huanghuazhan rice fertilization decision model based on UAV remote sensing technology[J]. Journal of Shenyang Agricultural University, 2019, 50(3): 324-330. (in Chinese with English abstract)
[25] 郑华斌,陈灿,傅志强,等. 有机肥化肥配施的双季晚稻群体冠层光谱特征研究[J]. 中国稻米,2017,23(4):6-13.
Zheng Huabin, Chen Can, Fu Zhiqiang, et al. Study on canopy spectral characteristics of double cropping late rice[J]. China Rice, 2017, 23(4): 6-13. (in Chinese with English abstract)
[26] 冯帅,许童羽,于丰华,等. 基于无人机高光谱遥感的东北粳稻冠层叶片氮素含量反演方法研究[J]. 光谱学与光谱分析,2019,39(10):299-305.
Feng Shuai, Xu Tongyu, Yu Fenghua, et al. Study on retrieval method of nitrogen content of Japonica Rice Canopy Leaf in Northeast China based on UAV hyperspectral remote sensing[J]. Spectroscopy and spectral analysis, 2019, 39(10): 299-305. (in Chinese with English abstract)
[27] 曹英丽,邹焕成,郑伟,等. 水稻叶片高光谱数据降维与叶绿素含量反演方法研究[J]. 沈阳农业大学学报,2019,50(1):101-107.
Cao Yingli, Zou Huancheng, Zheng Wei, et al. Research on dimensionality reduction and chlorophyll content inversion of rice leaf hyperspectral data[J]. Journal of Shenyang Agricultural University, 2019, 50(1): 101-107. (in Chinese with English abstract)
[28] 侯彦林,周燕,周炜. 氮利用率和氮转化率评价氮肥肥效比较研究[J]. 东北农业大学学报,2013,44(2):28-36. Hou Yanlin, Zhou Yan, Zhou Wei. Comparative research of evaluation nitrogen fertilizer efficiency between the nitrogen use efficiency and fertilizer yield method[J]. Journal of Northeast Agricultural University, 2013, 44(2): 28-36. (in Chinese with English abstract).
[29] 吕茹洁,商庆银,陈乐,等. 基于临界氮浓度的水稻氮素营养诊断研究[J]. 植物营养与肥料学报,2018,24(5): 1396-1405.
Lv Rujie, Shang Qingyin, Chen Le, et al. Diagnosis of rice nitrogen nutrition based on critical nitrogen concentration[J]. Journal of Plant Nutrition and Fertilizer, 2018, 24(5): 1396-1405. (in Chinese with English abstract)
Precision fertilization by UAV for rice at tillering stage in cold region based on hyperspectral remote sensing prescription map
Yu Fenghua1,2, Cao Yingli1,2, Xu Tongyu1,2※, Guo Zhonghui1, Wang Dingkang1
(1.,,110866,;2.,110866,)
The extra-root topdressing of rice at the tillering stage is one of the key steps in the management of rice production; it is also an important stage of fertiliser demand during the entire cycle of rice growth. The efficiency of extra-root topdressing directly affects the number of rice tillers and their growth in the middle and final stages. Due to the rapid advancement of the UAV technology in recent years, agricultural UAV are used for fertiliser spraying in the fields, which not only increased the rice yield but also reduced labour intensity and labour costs to a large extent, and greatly improved the efficiency of rice field management. In order to explore the use of UAV remote sensing to construct prescription maps to guide agricultural UAV to accurately topdressing rice at the tillering stage, realieze the field-scale nutritional diagnosis and UAV precise spraying, optimizefertilizer consumption, and ensure maximum rice yield,in this research, combining UAV remote sensing diagnosis with precision operation of agricultural UAV, UAV hyperspectral technology was used to establish the prescription maps of fertilization amount in rice tillering stage, combined with the operation parameters of agricultural UAV, grid division of fertilizing plots was carried out to determine the amount of precise fertilization, and precision fertilization was carried out by agricultural UAV. The consistent and desired end-member hyperspectral information of the ground features in the rice field were extractedto retrieve the nitrogen content of riceand a rice tillering stage fertilisation prescription map was established based in this, and the fertilization formula map of rice at tillering stage was established. According to the fertilizer amount prescription map, the operation parameters of agricultural UAV were set, and the plots to be fertilized were divided into grids to determine the spraying amount of each grid topdressing operation, and the precision topdressing was carried out by agricultural UAV. Dajiang spirit 4 RTK UAV was used to obtain the orthophoto image of the test fields with spatial information, the actual position of each topdressing grid was determined, and the variable spraying was realized by controlling the working voltage of the liquid medicine pump by PID algorithm. During the spraying process, droplet test cards were arranged on the ground at the same time to calculate the droplet coverage and other parameters such as droplet coverage rate. The results showed that five hyperspectral characteristic variables of rice were extracted in the 450-950 nm band by the method of feature band selection and feature extraction, the effects of rice nitrogen content inversion model constructed by Particle Swarm Optimization Extreme Learning Machine (PSO-ELM) was better than that of Extreme Learning Machine (ELM), and the coefficient of determination was 0.838 and the root mean square error was 0.466. The rice yield of UAV variable topdressing was basically the same as that of traditional topdressing, but the amount of pure nitrogen decreased by 27.34%.The study results can provide data and model basis for the precision variable topdressing of agricultural UAV in the tillering stage of rice in cold regions.
UAV; remote sensing; rice; hyperspectral;precision fertilization
于丰华,曹英丽,许童羽,等. 基于高光谱遥感处方图的寒地分蘖期水稻无人机精准施肥[J]. 农业工程学报,2020,36(15):103-110.doi:10.11975/j.issn.1002-6819.2020.15.013 http://www.tcsae.org
Yu Fenghua, Cao Yingli, Xu Tongyu, et al. Precision fertilization by UAV for rice at tillering stage in cold region based on hyperspectral remote sensing prescription map[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(15): 103-110. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.15.013 http://www.tcsae.org
2020-05-25
2020-06-25
国家重点研发计划(2016YFD0200600);辽宁省教育厅科技人才“育苗”项目(LSNQN201903)
于丰华,博士,讲师,主要从事精准农业航空研究。Email:adan@syau.edu.cn
许童羽,博士,教授,博士生导师,主要从事精准农业、智慧农业相关研究。Email:xutongyu@syau.edu.cn
10.11975/j.issn.1002-6819.2020.15.013
S252
A
1002-6819(2020)-15-0103-08
猜你喜欢
中国农业科学(2022年8期)2022-05-16
麦类作物学报(2021年12期)2022-01-08
中国土壤与肥料(2021年5期)2021-12-02
中国土壤与肥料(2021年5期)2021-12-02
中国土壤与肥料(2021年5期)2021-12-02
世界农药(2020年9期)2020-12-23
党的生活(黑龙江)(2020年10期)2020-12-18
今日农业(2020年20期)2020-12-15
吉林农业·下半月(2017年7期)2017-07-15
农民致富之友(2017年6期)2017-05-10
