基于大数据的高分辨率遥感场景识别
2020-09-16 12:27赵峰
泰州职业技术学院学报 2020年3期
赵 峰
(泰州职业技术学院 机电技术学院,江苏 泰州 225300)
随着互联网的发展,数据的量级呈指数型函数飞快增长,大数据已经渗透到各个领域。经过半个世纪的探索和尝试,遥感技术已经在实用化的方向迈出了坚实的一步,数据获取的渠道更加趋于多样化,需要处理的遥感信息量也快速增加[1]。传统的数据处理模式已经无法适用于大数据的分析[2]。遥感场景识别是在计算机系统的支持下,通过对遥感场景中各类地物信息的空间特征和光谱特征进行综合分析、提取,将特征空间划分成互不重叠的子空间,然后将图像中的各个像元划分到各个子空间对应的地物类别,极大地提高了从遥感场景中获取信息的速度和遥感信息自身的客观性[3]。基于大数据的遥感场景识别问题成为遥感信息处理面临的一个难题。
1 相关技术
1.1 开发环境
MATLAB 具有方便的数据可视化功能,可以将向量和三维的可视化、图像处理、动画和表达式作图[4-6]。Liblinear 是用于大型线性分类的库,主要用于海量数据的分类,一般用于大规模的数据集,具有速度快,尤其是针对稀疏的特征的优点,但缺点是内存资源消耗高。
1.2 数据集
WHU-RS19是从谷歌卫星影像上获取的遥感场景。每幅遥感场景的像素均为600*600,它是由机场、海滩、桥、商业等19 种1005 幅场景组成的。AID(Aerial Image Dataset)航空图像数据集来源于Google 地球图像中采集的样本图像,由机场、荒地、棒球场等30种10000幅场景组成。
1.3 特征提取相关技术
LBP(Local Binary Pattern),局部二值模式,是一种用来描述图像局部特征的算子,优点是具备灰度不变性和旋转不变性。由于LBP 特征计算简单、效果较好,因此LBP 特征在计算机视觉的诸多领域都得到了广泛的应用[7]。
SIFT(Scale Invariant Feature Transform),尺度不变特征变换,对旋转、尺度缩放、亮度变化等特征均保持不变,是一种非常稳定的局部特征。SITF 算法具有稳定性、独特性、多量性、可扩展性、高速性、实时性等特点。
CH(Color Histogram),颜色直方图,是一种全局特征,对图像本身的尺寸、方向、视角的依赖性较小,具有较高的鲁棒性。CH算子特征提取优点是旋转不变性和平移不变性;不受数字图像尺度变化的影响;其缺点是不能有效地表现出颜色的空间分布信息;实际应用中受到天气的影响较大,结果具有不稳定性。
SVM(Support Vector Machine),支持向量机,是一种常见的判别方法。在机器学习领域,是一个有监督的学习模型,通常用来进行模式识别、分类以及回归问题的分析[8]。
SVM 支持向量机通过一个非线性映射p,把样本空间映射到一个高维乃至无穷维的特征空间中(Hilbert空间),使得在原来的样本空间中非线性可分的问题转化为在特征空间中的线性可分的问题。
2 研究方法
2.1 基本流程
基于大数据的高分辨率遥感场景识别通常采用监督法分类方法。本文研究的数据量较大,因此采用随机函数来进行样本的选取,依据训练区的样本选择提取特征参数,通过分类器进行分类[9]。第一步选取WHU-RS19 数据集和AID 航空数据集;第二步分别使用LBP 算子、SIFT 算法和CH算子进行特征提取;第三步使用SVM支持向量机进行分类。
2.2 特征提取
(1)LBP算子特征提取。参数信息见表1。

表1 LBP算子特征提取参数
如果识别图像大于600px则进行等比例缩放。
(2)SIFT算法特征提取。参数信息见表2。

表2 SIFT算法特征提取参数
将颜色场景转化为灰度图并转化为矩阵,如果场景像素大于600,则进行等比例缩放。
(3)CH算子特征提取。参数信息见表3。

表3 CH算子特征提取参数
将颜色场景转化为矩阵,如果场景像素大于600,则进行等比例缩放。
(4)特征信息综合。参数信息见表4。
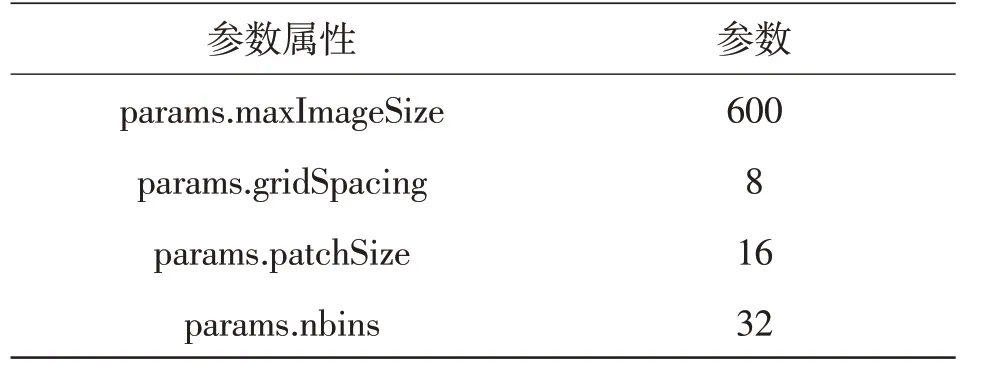
表4 综合特征提取参数
通过循环对每类场景特征进行信息整合,文件名按照原文件名加参数的格式保存。如果文件夹中已有先前生成的文件则提示文件已存在,不再重新进行计算。
2.3 SVM分类
参数信息如表5 所示。通过循环对数据集进行样本学习以及训练[10]。

表5 SVM分类参数信息
2.4 实验结果及分析
本文通过每类场景的识别率来判断算法的效果。
(1)WHU-RS19数据集实验结果。

通过多次试验,并进行结果分析,不同样本比例的LBP算子、SIFT算法和CH算子特征提取识别率统计如表6所示,折线图如图1所示。

表6 不同样本比例的LBP算子、SIFT算法和CH算子特征提取识别率统计(RS19数据集)

图1 不同样本比例的LBP算子、SIFT算法和CH算子特征提取识别率折线图(RS19数据集)
根据表6 和图1 可以得到:CH 算子的识别率明显高于LBP 算子和SIFT 算法;随着样本比例的增大,CH算子、LBP算子和SIFT算法的识别率总体呈增长趋势[11]。
混淆矩阵(Confusion Matrix)也称误差矩阵,可以很好地反映图像分类的精度,适用于监督学习。LBP算子在50%样本比例中的混淆矩阵如图2所示[12]。
根据LBP 算子在50%比例中得到的混淆矩阵中可以得出如下结论:桥、工业、公园场景识别效果较差。容易混淆的场景:农田和停车场,草地和停车场,池塘和海滩。海滩、足球场、森林、草地、山、火车站和高架桥识别率较高。
通过三种不同的算法的比较,森林、山和火车站的识别率较高。桥的识别率较低。由于RS19数据集图片数量相对较少,在实验过程中采用的是随机算法,导致出现个别实验随着样本比例升高识别率下降的现象。但是总体上随着样本比例升高,场景的识别率越高。而且在低层次场景识别上,CH算子提取的特征比LBP算子和SIFT的效果好[13]。
(2)AID 数据集实验结果。通过多次试验,并进行结果分析,不同样本比例的LBP 算子、SIFT算法和CH算子特征提取识别率统计如表7所示,折线图如图3所示。
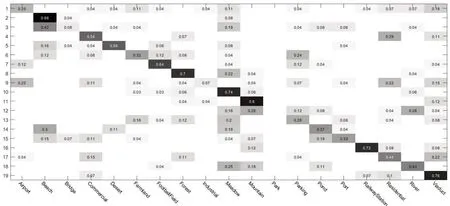
图2 样本比例为50%的LBP算子混淆矩阵

图3 不同样本比例的LBP算子、SIFT算法和CH算子提取识别率折线图(AID数据集)

表7 不同样本比例的LBP算子、SIFT算法和CH算子特征提取识别率统计(AID数据集)
根据表7 和图3 可以得到以下结论:(1)CH算子的识别率明显高于LBP算子和SIFT算法;(2)随着样本比例的增大,CH算子、LBP算子和SIFT算法的识别率都呈增长趋势[14]。
通过三种不同的算法的比较,密集的住宅和停车场的识别率较高。桥、中心、火车站、旅游胜地、学校和广场的识别率较低[15]。总体上,不管是哪种算法,样本比例越高,场景的识别率越高;在低层次场景识别上,CH算子提取的特征比LBP算子和SIFT的效果好。
3 结论
本文在基于大数据的高分辨遥感图像识别过程中,通过LBP 算子、SIFT 算法和CH 算子对RS19 数据集和AID 数据集进行遥感场景识别,通过其结果不难看出:CH算子的识别率最高,LBP算子的识别率其次,SIFT 算子的识别率最低;识别率随着样本比例的提高也逐渐提高。虽然低层特征所需的资源消耗少,但是其精度仍然是有限的(总体低于50%),后续将采用中层特征和高层特征来进行遥感场景的分类识别。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
校园英语·上旬(2020年1期)2020-05-09
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年15期)2019-08-27
电子制作(2019年15期)2019-08-27
中国听力语言康复科学杂志(2019年3期)2019-06-24
电子制作(2018年19期)2018-11-14
卷宗(2017年16期)2017-08-30
中国高新技术企业(2017年5期)2017-05-05
物联网技术(2016年11期)2017-01-12