ADCP测量水深的过滤与插值方法
2020-09-15 08:05:22彭东立章寿涛
声学技术 2020年4期
彭东立,汤 鑫,章寿涛
(江苏中海达海洋信息技术有限公司,江苏南京211800)
0 引 言
声学多普勒流速剖面仪(Acoustic Doppler Current Profiler, ADCP)是河道流量测量中的重要仪器,在水文行业得到了广泛应用,是精度和效率最高的流量测量仪器[1]。ADCP流量测量的实现,是通过对其测量的每一帧微断面进行流量累加完成的,而水深是微断面十分重要的一个
属性,水深测量异常时,将对断面面积及断面流量的计算结果产生影响,需对该异常值进行修正插值,以消除异常值对流量测量结果的影响。
目前,ADCP水深测量异常判断是采用格拉布斯法,用最近的正确深度测量值替换异常水深值[2-4]。格拉布斯法以测量数据服从正态分布为前提,当河底为斜坡时,ADCP测得的四波束深度数据不符合该分布,且利用最近的深度测量值直接替换异常水深误差较大。因此,本文对斜坡河底条件下ADCP水深测量值的理论标准差进行分析,设计了新的深度过滤方法以及水深异常值的插值方法。
1 斜坡河底ADCP水深测量理论标准差分析
假设ADCP采用四波束Janus阵型结构,换能器按照“十”字型安装,换能器序号按顺时针依次为“1、4、2、3”,换能器发射的四波束与ADCP坐标系z轴的夹角均为 20°;河底为倾斜平面,忽略ADCP纵倾横摇的影响,建立直角坐标系如图1所示[5]。
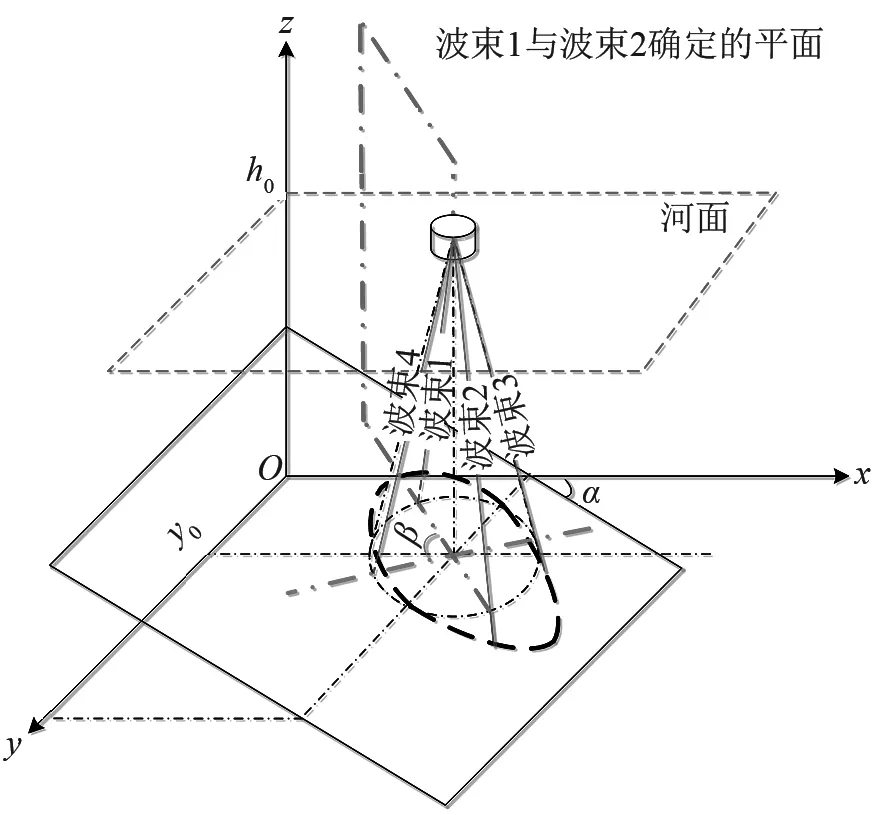
图1 ADCP波束与河底倾斜平面几何关系示意图Fig.1 The geometric relationship plot between ADCP beam and slope plane of river bottom
基于假设条件,建立的直角坐标系z轴与ADCP坐标系中的z轴重合。四波束与z轴的夹角相等,故四波束轴线在同一圆锥曲面内,该曲面方程为

波束1、波束2构成的平面方程为

波束3、波束4构成的平面方程为

河底倾斜平面的方程为

第n个波束测量到的深度值为

其中,n的取值为1、2、3、4。联立式(1)~(5)即可分别得到4个波束深度的理论测量值,这4个值的平均值为
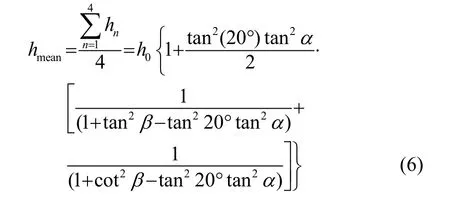
四波束深度理论测量值的标准差为
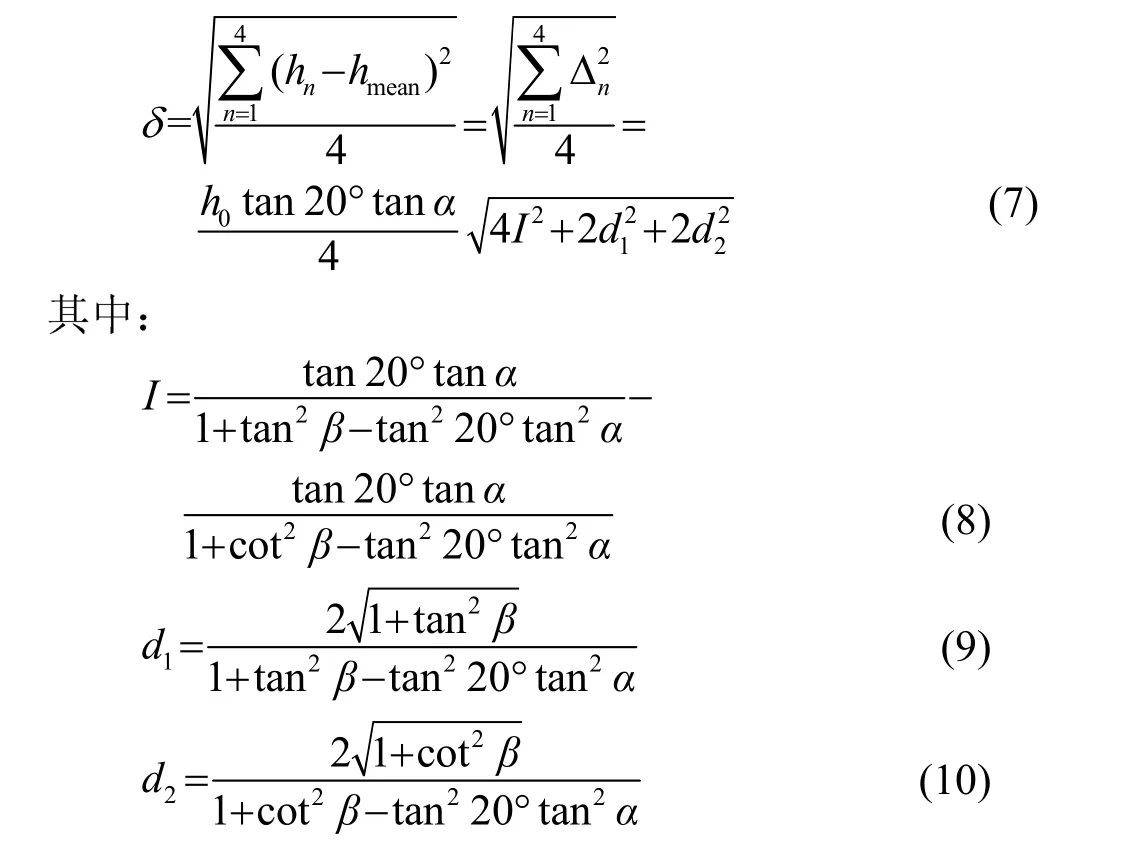
由式(7)可以看出,河底为倾斜平面时,ADCP四个波束深度测量理论值的标准差与该帧河底实际深度h0成正比,与河底倾斜角度α、ADCP航向和河底斜坡平面的夹角β有关。
2 ADCP水深过滤方法
ADCP每帧深度的测量值等于四波束深度测量值的平均或者加权平均,该帧深度测量的准确度可通过四波束深度测量值的一致性进行判断[6]。但式(7)说明四波束深度测量值的标准差与实际水深成正比,故不能简单地依据四波束深度的标准差进行异常判断。由式(6)可以看出,四波束深度测量值的平均与实际水深亦成正比,故可用标准差与平均值的比值抵消实际水深的影响,作为四波束深度测量一致性判断的依据。四波束深度测量值的标准差和平均值之比越小,说明四个波束深度测量值的一致性越好,即该帧深度测量正确;反之该帧深度测量错误。通过四波束深度测量值标准差与平均值的比值进行水深测量进行深度过滤,需设定合理的比较阈值,该阈值应大于理论最大值。根据式(6)和式(7)可知,四波束所测深度的标准差平均值比值为
由式(11)可以看出,该比值虽与水深实际值无关,但与河底倾斜角度α、ADCP航向和河底坡度方向的夹角β有关。利用 Matlab画出δ/hmean关于α、β的变化曲面如图2所示,其中α的取值范围为0°~70°,β的取值范围为 0°~90°。当α大于70°时,将可能有波束与河底倾斜平面不相交,即会有波束测量深度时发生明显错误,故假设α<7 0°。
图2 深度标准差与平均值的比值随河底倾角和ADCP航向角的变化Fig.2 Variation of the ratio of standard deviation to average values with dip angle of river bottom and ADCP heading angle
从图2可以看出,当α的值固定时,δ/hmean随β先减小后变大,在β为0°和90°时取得最大值;当β值固定时,δ/hmean随α单调递增。故当α等于河底倾角最大值αmax(小于 70°),且β等于 0°或 90°时,δ/hmean取得最大值。此时式(11)简化为

表1列出了当αmax取不同值时的δ/hmean的最大值,令β取0°或90°。
表1 比较不同河底倾斜角α对应的δ/hmean的值Table 1 Comparison of the δ/hmean values corresponding to different bottom slope angles α
实际环境中河底倾角一般小于 30°,故δ/hmean理论上应小于0.153 6,但四波束深度测量值还受环境噪声的影响,故δ/hmean值亦会受到测量噪声的影响。本文不分析受测量噪声影响情况下的4波束深度标准差与平均值的比值服从何种分布,而是利用以往测量数据的统计结果选择合适的阈值。河底坡度较大时的四波束深度测量数据如表2所示。
由表2可见,河底倾斜坡度较大时,实际测量到的δ/hmean在0.09左右,最大值为0.177,与上文的理论分析基本一致。综合理论分析与实际测量统计,选择水深测量异常判定的阈值为 0.2。当δ/hmean大于该阈值时,判定为异常值;反之,判定为正确值。

表2 斜坡河底四波束深度测量标准差/平均值随机统计Table 2 Random statistics of standard deviation/average values for the four beam depth measurements at the slope river bottom
3 ADCP水深插值方法
假设河底曲面满足连续、分段可导的条件,水深测量值随测量时间的变化曲线亦满足分段可导的条件,测量水深随时间变化曲线的不可导点为水深突变点或斜坡河底测船速度的突变点。
基于上述分析,可采用前几帧水深测量值来预测水深:当遇到水深明显变化且判定该点测量正确时,说明该处为水深突变点或测船速度突变点,采用后续正确深度测量值重新预测水深;当遇到水深异常时,采用预测值作为该处水深的估计值,对该帧进行深度插值。
本文采用最小二乘法,基于前7帧非突变水深测量值进行曲线拟合。设水深随时间变化的匹配函数为

其中,h(t)为水深值;t为测量时间。求解上式系数的方程组为
当遇到水深测量异常帧时,利用其前7帧非突变深度值代入式(14),计算得出系数a0、a1、a2、a3,并将这些系数与深度异常帧的时间代入式(13),即得到该帧预测深度。
因为在走航过程中,每个测次的帧数有限,且随着测量船的运动,水深有一定起伏,通过拟合曲线来预测未来第n(n>1)个无效帧的深度时会导致预测深度的准确度太差,因此本文只对第一个无效帧的深度进行拟合预测,如果是连续的无效帧,则后续的无效帧深度与第一个无效帧相同。
4 试验数据验证
为验证改进后的深度过滤及插值的效果,通过对单帧内4个波束的深度进行对比,验证深度过滤的优势,通过相邻帧的深度对异常点进行插值验证深度插值的优势。
4.1 深度过滤对比
以乌江ADCP的流量测试数据为例进行分析。由流速等值图可知,第240帧深度的测量明显异常,该帧四波束深度值见表 3,对于这种四波束深度差异很大的点,原深度过滤算法并未将其标记为异常。
原深度过滤算法使用格拉布斯法来判定异常值。该方法的主要思路为选取四波束中的最大值和最小值,判定最值是否为异常值,若为异常值则剔除该值,但在表3中,对4个波束的判断阈值G均进行了计算:,其中hmi为第i个波束的深度测量值,hmmean为深度测量值的均值。为防止判定标准过严导致错判斜坡水底的深度过滤结果,因此选择置信概率为0.95的格拉布斯法作为对比,按照格拉布斯法判定,当G>1.46时,才判定4个波束的深度测量存在异常,但是波束1所测深度仍在正常范围内。为避免这种错误导致深度计算结果出现较大偏差,按照本文提出的水深测量异常判定方法,计算该帧四波束标准差/平均值=0.68>0.2,认为该帧深度测量值存在异常。这证明本文提出方法相比格拉布斯法,可剔除某些原算法错判的一些异常值,提高了深度计算的精度。

表3 比较单帧四波束深度及G值Table 3 Comparison of the measured depth and G value of four beams in a single frame
4.2 水深插值对比
在通过单帧的深度过滤确定某帧所测深度为异常值后,应对所测深度进行剔除。为比较本文提出的ADCP水深插值方法的效果,需利用一段实际水深测量正确的数据,采用本文所述方法预测第73帧的深度值,并将预测结果与正确测量值进行对比,已知第73帧深度值实际为16.031 m。现选择我公司在乌江测试的一段数据,其测量时刻与测量水深如表4所示。

表4 相邻帧水深插值Table 4 The depth interpolation values of adjacent frames
基于该段数据前7帧(66~72 s),采用第3节所述方法进行曲线拟合,并利用拟合曲线计算得第73 s水深值为16.202 m,与实际测量值16.031 m相比偏大 0.171 m。原深度插值算法则要求,如该帧无效,则使用前一有效帧的深度作为该无效帧的深度,因此使用第72帧的水深15.045 m代替,与实际测量值相比偏小 0.986 m。显然,本文提出的插值方法更为准确。
5 结 论
本文通过分析通过斜坡河底的ADCP四波束测得深度的理论标准差,说明格拉布斯准则并不适用于水深测量异常判定。提出了基于四波束深度的标准差与平均值的比值判定ADCP水深测量是否异常的新方法,并采用最小二乘法对水深测量错误帧进行深度插值。通过对过去相关测量数据进行示例处理,说明了在坡度水底的水体环境中,新的水深过滤方法较格拉布斯准则更为准确,新的插值方法较简单的邻近值替代异常值的方法,误差更小。
猜你喜欢
河北水利(2022年10期)2022-12-29 11:48:12
海洋通报(2022年4期)2022-10-10 07:40:32
核桃源(2020年5期)2020-11-18 12:31:55
校园英语·下旬(2018年6期)2018-10-30 08:08:32
娃娃画报(2018年7期)2018-08-15 11:34:44
快乐语文(2017年25期)2017-11-16 03:24:47
作文周刊·小学三年级版(2017年40期)2017-11-08 22:57:57
中国民族医药杂志(2016年9期)2016-05-09 07:51:50
浙江国土资源(2015年4期)2015-05-09 08:43:59
机械制造与自动化(2014年1期)2014-03-01 04:22:04