LQR和MPC控制器在泊车路径跟踪应用中的比较研究
2020-09-14 12:17钟京宏
时代汽车 2020年15期
钟京宏
摘 要:本文对LQR(线性二次调节器)和MPC(模型预测控制器)在自动泊车应用中的性能进行了比较研究。通过使车辆模型在MATLAB环境下完成实验,比较了控制器的控制精度。并介绍了LQR和MPC控制器的用途、优点和局限性。
关键词:LQR控制器 MPC控制器 自动泊车 路径跟踪
1 引言
目前汽车已经成为人们日常工作生活中使用频率最高的交通工具,随着现代电子控制技术和人工智能技术的发展,汽车正向着更加智能方面发展。近年来,随着汽车拥有率的爆发式增长,城市本就不宽裕的空间更加捉襟见肘,大城市中停车难已经成为一个普遍的难题。面对狭小的泊车空间许多驾驶员花费大量的时间进行泊车,在泊车过程中容易发生擦挂等事件更加造成了交通的拥堵。因此能够快速准确地实现泊车的自动泊车技术刻不容缓。
自动泊车技术即控制器引导车辆按照决策系统规划好的路径进行行驶,跟踪控制器性能的优劣直接决定了泊车入位的精度。目前用的主要有PID控制器、LQR控制器、MPC控制器、滑模控制器、模糊控制器等,控制器性能各有优劣,本文主要对现在比较热门的LQR和MPC控制器进行实验比较和分析。
2 研究现状
国内外研究学者在这两种控制器的研究上已经有了丰富的经验。北方工业大学的徐春玲[1]通过参考人工泊车过程的经验设计了“直接引导控制”泊车方法和控制策略。设计LQR反馈控制器来弥补车辆实际停车轨迹与期望轨迹之间的偏差。实验结果得出控制器能准确控制车辆泊车。
天津大学的高琳琳[2]建立了以二自由度车辆动力学模型为基础的跟踪误差模型,设计了前馈LQR控制器,并采用改进的参数计算和调整方法来提高LQR控制器的适应性和控制精度。通过MATLAB仿真实验显示,控制器能将误差控制在很小的范围内。
武汉工程大学杨述斌等[3]以汽车运动学模型为基础,设计了利用模型预测控制的泊车路径跟踪控制系统,对比了采用模型预测控制的系统和采用PID控制器的系统,结果表示此方法乘客舒适度更高,然后对纯路经跟踪和带有模型预测控制的路径跟踪进行路径跟踪仿真研究,在实验过程中加入干扰量,实验得出采用模型预测控制的系统抗干扰能力更优的结论。
叶浩[4]设计了基于软约束二次规划模型预测的泊车路径跟踪控制器。运用Simulink和Carsim对低速工况泊车路径跟踪控制进行仿真,结果显示在泊车全过程都准确跟踪,泊车效果远好于优于使用PID控制算法和开环控制的泊车效果。
T Tashiro[5]设计了基于MPC模型预测控制器并运用在泊车轨迹跟踪上,但其运用场景简单,只能应用与垂直泊车切方向不能改变的情形。
3 系统设计
整个系统由车辆模型、比较模块和控制器组成。车辆模型是运动自行车模型,它将给出车辆的位置和方向角,与转向指令和速度相对应。比较器将车辆的这个位置和航向角与期望的路径进行比较,并找出横向偏移误差和航向角误差。横向偏移误差是车辆位置和期望路径之间的误差。航向角误差是指车辆与路径之间的航向差。这两个错误现在传递给控制器,控制器将计算转向命令,以将这些错误减少到零[6]。
3.1 车辆模型
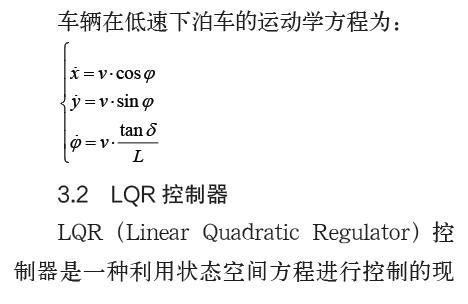
由于汽车在自动泊车过程中一般速度很低,车轮几乎不会发生侧滑现象,因此泊车过程可以看作刚体的平面运动。据阿克曼转向几何把汽车运动学模型简化为双轴二自由度模型[7]。如圖1所示,Oc为车辆转动圆心,v为后轴中心点速度,Vf为前轮速度,为航向角度,为前轮的等效转角。
车辆在低速下泊车的运动学方程为:
3.2 LQR控制器
LQR(Linear Quadratic Regulator)控制器是一种利用状态空间方程进行控制的现代控制方法,在各行各业都有使用。文中利用LQR控制理论设计自动驾驶的横向运动控制器,首先确定如下控制系统性能指标[8]:
其中,Q、R代表控制器的加权矩阵
得到LQR控制器的控制律为:
3.3 MPC控制器
模型预测控制(Model Predictive Control,MPC)基本原理为控制算法以预测模型为基础,利用系统当前状态和未来一段时间内的车辆控制量,计算得出未来的车辆最好的控制输出,同时还需根据一系列优化条件与当前状态求解未来系统控制量,为一种滚动时域控制方法[9]。一般情况下,预测模型需要描述系统的基本状态,有状态方程、线性稳定系统、传递函数等模型,本文以状态函数作为预测模型。
4 仿真实验分析
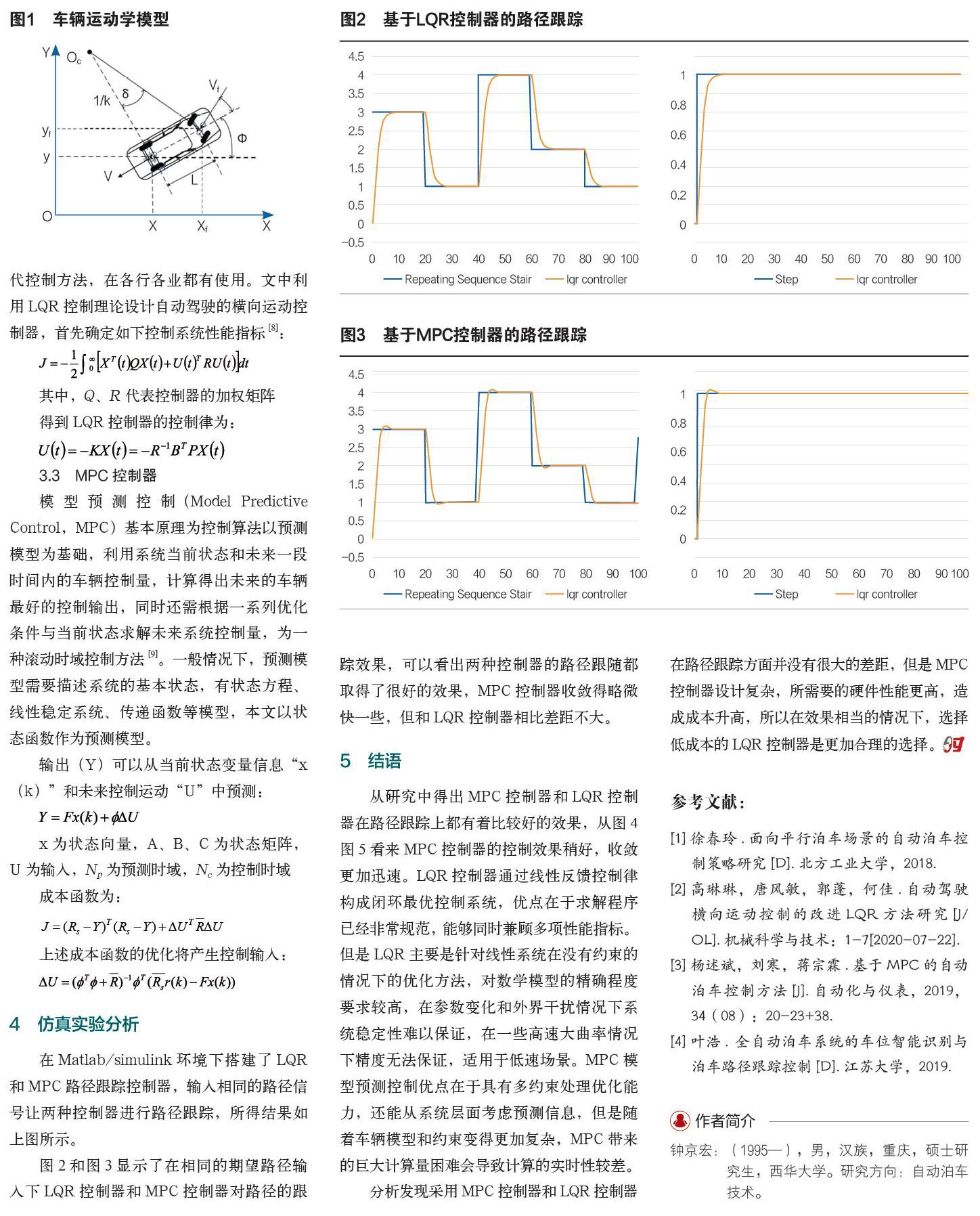
在Matlab/simulink环境下搭建了LQR和MPC路径跟踪控制器,输入相同的路径信号让两种控制器进行路径跟踪,所得结果如上图所示。
图2和图3显示了在相同的期望路径输入下LQR控制器和MPC控制器对路径的跟踪效果,可以看出两种控制器的路径跟随都取得了很好的效果,MPC控制器收敛得略微快一些,但和LQR控制器相比差距不大。
5 结语
从研究中得出MPC控制器和LQR控制器在路径跟踪上都有着比较好的效果,从图4图5看来MPC控制器的控制效果稍好,收敛更加迅速。LQR控制器通过线性反馈控制律构成闭环最优控制系统,优点在于求解程序已经非常规范,能够同时兼顾多项性能指标。但是LQR主要是针对线性系统在没有约束的情况下的优化方法,对数学模型的精确程度要求较高,在参数变化和外界干扰情况下系统稳定性难以保证,在一些高速大曲率情况下精度无法保证,适用于低速场景。MPC模型预测控制优点在于具有多约束处理优化能力,还能从系统层面考虑预测信息,但是随着车辆模型和约束变得更加复杂,MPC带来的巨大计算量困难会导致计算的实时性较差。
分析发现采用MPC控制器和LQR控制器在路径跟踪方面并没有很大的差距,但是MPC控制器设计复杂,所需要的硬件性能更高,造成成本升高,所以在效果相当的情况下,选择低成本的LQR控制器是更加合理的选择。
参考文献:
[1]徐春玲.面向平行泊车场景的自动泊车控制策略研究[D].北方工业大学,2018.
[2]高琳琳,唐风敏,郭蓬,何佳.自动驾驶横向运动控制的改进LQR方法研究[J/OL].机械科学与技术:1-7[2020-07-22].
[3]杨述斌,刘寒,蒋宗霖.基于MPC的自动泊车控制方法[J].自动化与仪表,2019,34(08):20-23+38.
[4]叶浩. 全自动泊车系统的车位智能识别与泊车路径跟踪控制[D].江苏大学,2019.