
基于深海采矿技术的新型深水清淤技术方案探索①
2020-09-14 11:06程阳锐王义锋潘洪月宛良朋王文胜
矿冶工程 2020年4期
程阳锐, 王义锋, 潘洪月, 宛良朋, 郑 皓, 王文胜
(1.长沙矿冶研究院有限责任公司,湖南 长沙410012; 2.中南大学,湖南 长沙410083; 3.深海矿产资源开发利用技术国家重点实验室,湖南 长沙410012; 4.中国三峡建设管理有限公司,北京100038; 5.杭州华能工程安全科技股份有限公司,浙江 杭州310000)
为应对日益严重的河道、湖泊、水库等淤积问题,近年来我国出现了很多港口、航道、内河以及湖泊的疏浚与清淤工程,疏浚、清淤技术得到长足发展,装备能力也大大提升。 目前采用的清淤方式是将清淤机具装备在船上,由清淤船作为施工平台在水面上操作清淤设备将淤泥开挖,并通过管道输送系统输送到岸上堆场中。 主要作业方式有:抓斗式清淤、泵吸式清淤、普通绞吸式清淤、斗轮式清淤。 目前的清淤技术虽然可以实现一些河流水库的清淤任务,并且输送浓度大、耗水量小,但此类疏浚设备存在以下难点:一是水深及作业精度问题。 水库为人工依据地势而建,多选择在高山峡谷地区,我国是拥有200 m 级以上高坝最多的国家,目前世界建成的200 m 级以上高坝77 座,我国有20 座,占26%;在建的200 m 级以上高坝19 座,我国就有12 座,占63%[1]。 在面对高坝作业时,虽说以现有的技术可以实现很大深度的挖掘,但施工作业困难,施工精度无法有效控制,施工成本高、工效低。 二是设备运输问题,水库多在内陆地区,下游多建有闸坝设施,超大型耙吸挖泥船等施工设备难以进入。 海洋航道疏浚单位具有大型的疏浚设备,疏浚效果好,疏浚成本低,然而除长江、辽河等少数大河具有大型船舶航道外,其他内河航道条件不是总能满足运输要求,如何将大型疏浚设备运入水库范围内是一大难点。 三是环保问题,江河水库地区地形复杂、环保要求较高,多数为饮用水源,在清除淤泥过程中如何处理底质扰动,避免次生污染也是一大难点。
为解决江河湖库深水水域淤积问题,拟借鉴深海采矿中的稀软底质作业技术,结合江河湖库的实际情况,开发一种适用于江河湖泊的集深水低扰动清淤、淤浆垂直提升为一体的智能深水环保清淤设备。
1 深海采矿技术
1.1 深海固体矿产资源
海洋占地球面积约70%,在大洋深处蕴藏着丰富的矿产资源,主要固体矿产资源有多金属硫化物、富钴结壳和多金属结核(锰结核)。 多金属硫化物富含铁、锰、铜、铅、锌、金、银等多种金属元素,常生成于水深500~3 500 m 大洋中脊轴部的裂谷带、弧后盆地,与扩张中心的热液喷口密切相关,一般呈小丘、烟囱和锥形体状成群出现,与活动热液喷口或古热液喷口相伴生。多金属硫化物除了东太平洋海隆和红海比较典型外,在大西洋和印度洋的某些中脊段以及西太平洋边缘海盆(如四国海盆、劳海盆、北斐济海盆、马里亚纳海槽和冲绳海槽等)均存在[2]。 富钴结壳富含钴、锰、镍、锌、铂、铜、铁、钛等,一般生长在800 ~3 500 m 水深的裸露海山基岩上。 钴结壳由海水沉淀而成,其生长速率极低,一般不大于1 ~10 mm/Ma,通常生长率为1 ~6 mm/Ma,现有勘查数据表明钴结壳厚度一般在0 ~5 cm[3]。 多金属结核是一种富含铁、锰、铜、镍、钴、铅等多种金属元素的海底固体矿产资源,一般分布于水深4 000~6 000 m 海底沉积物表面,呈椭球状,直径通常2~6 cm,平均密度1.96 g/cm3,其在太平洋、大西洋、印度洋以及我国南海海盆均有分布,尤其是太平洋深海区分布最广[4]。 在太平洋最著名的区域为克拉里昂-克里帕顿区(也称C-C 区)。 3 种深海固体矿产资源在国际海底的储量及开发制度如表1 所述。

表1 国际海底主要矿产资源储量及开发制度
1.2 多金属结核采矿技术
3 种固体矿产资源均分布在深海水域,需要将矿物从海底输运到海面。 在矿物提升方面近几十年来出现了链斗式、抓斗式、拖网式、管道提升等多种输运技术,经过海上试验,目前得到行业普遍认可的是管道提升方式。
3 种矿产资源开采的区别在于,海底采矿设备的作业机构及行走机构不同。 多金属硫化物分布于洋中脊,为三维矿,需要对矿物进行破碎、开挖。 富钴结壳为薄层矿,破碎过程中要尽量避免开采到底层基岩,属于剥离采矿形式。 多金属结核因处于深海稀软沉积物表面,且沉积物底质剪切强度小,故开采多金属结核时要求设备能够收集表层的矿石,且采矿设备可在稀软底质表面行走。 我国在多金属结核开采中所采用的技术方案见图1。

图1 多金属结核开采技术方案简图
我国目前已成为唯一一个拥有3 种海底固体矿产资源矿区的国家,且2017 年中国五矿集团公司与国际海底管理局签署了多金属结核勘探合同,标志着深海多金属结核的开采进入新的历史时期[5]。 在多金属结核开采技术方面,自“八五”开始长沙矿冶研究院就致力于多金属结核开采作业装备的研发,“九五”期间在云南抚仙湖进行了水深100 m 级多金属结核采矿试验[6]。 “十二五”期间根据多金属结核区沉积物现状研发出了可在稀软底质稳健行走的采矿车底盘。 2016年长沙矿冶研究院在我国南海开展了水深300 m 级扬矿系统输送试验[7],2018 年在我国南海完成了多金属结核集矿系统(鲲龙500)水深514 m 模拟采矿试验[8],标志着我国多金属结核采矿技术基本达到国际先进水平。
2 深海采矿与深水清淤技术对比分析
深海采矿现有技术和深水清淤的实际需求在深水密封、动力传递、轨迹规划、信号控制、定位导航等关键技术上具有相同的技术问题,也有各自的区别。 相同之处主要体现在:在整体技术方案上,均由水底作业系统、水中输送系统、水面支持系统及水面中央控制系统组成;在关键技术方面,深海采矿和深水清淤比常规清淤水深较深,均会涉及深水密封、深水动力传递、压力平衡等技术。
2.1 深水耐压密封技术
海洋采矿中所涉及的3 种矿产资源水深在几百到几千米不等,需要采用特殊的水下耐压密封技术,以保证水下不可承受压力的元器件不被损坏。 据现有技术水平可以满足水深6 000 m 乃至更深的水域开展作业。
深水清淤通常在水深30 m 以深的水域作业,目前我国最大高坝锦屏二级达305 m,同样需要用到水下耐压密封技术。 采用成熟的深海作业密封技术可有效解决深水清淤设备的水下耐压密封问题。
2.2 动力传递技术
如图1 所示,典型的深海采矿系统采用水面船舶供电,通过脐带缆进行高压输送,到达海底作业车,作业车上配备有高压电机可直接使用高压电源,同时作业车配有水下变压器,将高压变为低压为低压设备供电。 在控制各执行机构方面,一般采用水下液压系统将电能转换为各机构可直接使用的液压能。 在整个动力传递中需要解决长距离高压配电、深水电能向液压能转换等技术难点。
深水清淤中如果将作业机构布置在水底,同样会面临电能传输以及能量转换的问题。 深海作业技术方案对深水清淤是一个有利的借鉴。
2.3 压力平衡技术
深海采矿中水下采矿车的部分液压部件及电气部件体积较大,技术上要求不能直接与海水接触,但也无法制作耐压壳体进行隔离。 通常采用压力平衡技术,通过将油类液体对元器件进行整体浸泡,在满足设备工作的情况下,实现设备元器件与海水隔离,同时设备内外处于压力平衡状态。
深水清淤设备在水深较深的作业中,单纯依靠设备自身耐压在技术上虽然可行,但经济上不允许,故需要采用内外压压力平衡技术,在这方面同样可以借鉴深海采矿作业中的相关技术。
2.4 水下定位及控制技术
深海环境具有高围压、无光、地形复杂、电磁衰减严重等特点,海底采矿设备在海底的位置确定及作业控制是一个重大的技术难点。 当前深海作业中一般采用长基线水声定位系统对水下作业设备进行定位[9],其定位精度一般在米级,虽有待进一步提高,但因为海底地域广阔,尤其是多金属结核矿区,米级的定位精度也能够满足使用需要。 在水下作业控制方面,因为水下无光环境及作业过程中所产生的羽状流,导致无法通过光学设备直接观察作业环境及作业过程,一般采用声学设备进行环境感知探测,同时采用自主型控制系统对设备进行控制及远程监测。 图2 为长沙矿冶研究院“鲲龙500”海试过程中所采用的长基线定位方案。
深水清淤中虽然水深不及海洋采矿,但水中悬浮颗粒多,作业时水质浑浊同样无法通过光学设备进行环境感知,需要借助声学设备。 另一方面清淤作业中水下底质环境更加复杂,不仅区域狭小,地形变化较大,且底质类型复杂(如泥沙、砂石、石块、建筑垃圾、织物垃圾以及物料垃圾等),对着底设备的行走要求更高。 故对其定位精度、环境感知精度、控制精度要求更高。 需要在现有深海采矿技术基础上进一步深入研究。
3 新型深水清淤技术探索
借鉴我国在深海采矿领域的技术基础和海上施工作业经验,结合深水清淤的作业特点及功能需求,形成了一整套集水下淤泥收集、淤泥垂直输送、水面浓缩、岸基固化处理的技术方案。
3.1 深水清淤系统组成
深水清淤系统主要由水下低扰动智能化作业车、水中长程输送管路、水面作业母船及淤泥浓缩设备、高浓淤泥输送管路及岸基固化处理站等组成(如图3 所示)。 其功能构成如图4 所示。
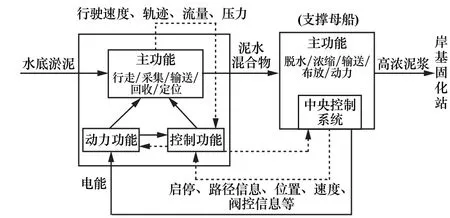
图4 深水清淤系统功能构成简图
水下低扰动智能化作业车主要功能是实现水底淤泥的收集,通过车载采集头将水底淤泥吸收到输送管路中,然后通过车载泥浆泵将淤泥输送到垂直提升管路中。
水中长程输送管路主要由输送软管、硬管及浮力材料组成,输送软管将作业车与垂直提升硬管连接,浮力材料安装在管路外部以减轻管路在水中的质量。
水面作业母船及淤泥浓缩设备主要由动力站、中央控制系统、布放设备、船载浓缩站、高浓度浆体输送站等组成。 动力站由发电机组及附件组成,主要为水下作业设备及水面中央控制系统提供动力。 中央控制系统由控制主机、动力输送单元等组成,为整套系统的控制中枢,可控制各子系统的工作模式、监视系统运行状态、检测整个系统的运转稳定性等。 布放设备由船载A 型架、绞车、缆绳等组成,用于水下作业设备作业前的布放及作业后的起吊回收。 船载浓缩站由浓缩机构及附件组成,用于对从水下输送来的泥水混合物进行脱水浓缩处理。 高浓度浆体输送站主要由输送泵及管路组成,用于将浓缩后的浆体通过管道输送到岸基固化站。
高浓淤泥输送管路主要由输送硬管、软管及浮力材料组成,用于将浓缩后的高浓淤泥浆体输送到岸基固化站。
岸基固化站是对淤泥进行固化、无害化及资源化的处理终端,根据需求不同有不同的设备组成。
3.2 深水清淤作业流程
深水清淤作业流程如图5 所示。
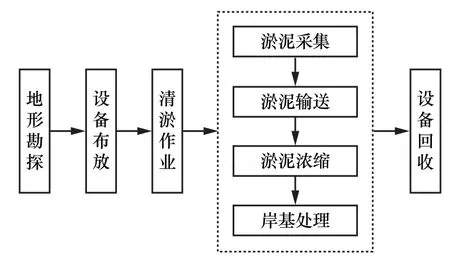
图5 深水清淤作业流程
地形勘探是通过多波束等对作业区域进行全区域的地形扫描,构建作业区地形图,为后期作业控制提供依据。 在支持母船上将作业车、管路、电缆等连接后,通过船载A 型架将设备布放到预定作业区域。 待设备准备就绪后,通过中央控制系统启动设备,水下作业车开始采集淤泥,并通过输送管路将水底淤泥输送到水面船舶,进入脱水浓缩站。 经脱水浓缩后的高浓淤泥浆体经船载泵站、输送管路等输送到岸基处理站,进行固化、无害化、资源化等处理。
3.3 深水清淤车工程样机研制
为进一步验证深水清淤技术的可行性,长沙矿冶研究院有限责任公司根据黄河小浪底水利枢纽中大坝深孔泄水建筑物的特征及坝体前方出现的泥沙淤积情况,研制了深水清淤车工程样机,如图6 所示。 深水清淤车主要由清淤机构、输送机构、行走机构、地形探测机构、布放回收机构、动力系统、水下控制系统、液压系统、水面监控中心等组成。 该车最大作业水深300 m,行走速度0.5 m/s,清淤作业宽度2 m。 在完成整车组装调试后,在实验室完成了水密性、地形探测、轨迹行走、清淤作业、自动控制等多项功能及性能试验。

图6 深水清淤车工程样机
4 深水清淤工程应用示范
在完成实验室水池试验的基础上,于2019 年12月16~17 日在小浪底水利枢纽完成了大坝深孔清淤及库区清淤功能验证。 在本次试验中,将“达诺1 号”(DreRo-Ⅰ)下放至82.3 m 水深处的宽3.5 m、高6.3 m的排沙洞外,通过环境感知单元进行了路径探索,利用综合导航控制系统以0.5 m/s 的速度在洞内行走到检修闸门处,实施了孔洞内清淤作业后退出排沙洞,后续在坝体前方淤积区域成功开展了稀软底质行走和清淤作业。 如图7~8 所示。
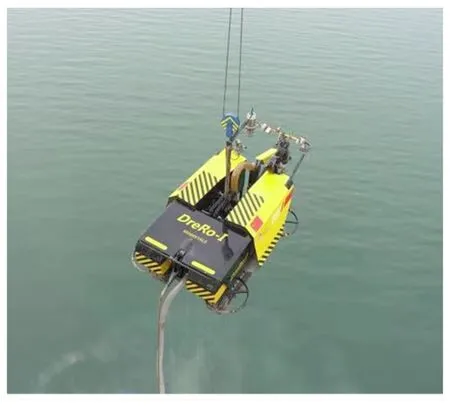
图7 清淤车布放
5 结 论
对深水清淤面临的问题、我国深海采矿技术状态及两者之间的技术特性进行了分析,形成了一种深水
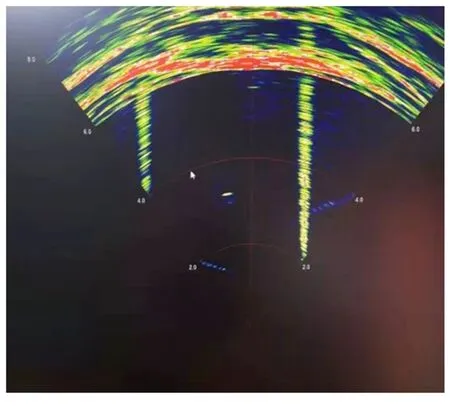
图8 清淤车水下作业
清淤技术方案,并对相关部件、功能及系统作业流程进行了详细介绍。 所研制的深水清淤车在黄河小浪底水利枢纽工程试验中的成功应用证明借鉴深海采矿技术开展陆地深水清淤是一种行之有效的方法。
猜你喜欢
陕西水利(2022年11期)2022-11-29
文萃报·周五版(2022年24期)2022-06-21
建材发展导向(2021年19期)2021-12-06
铁道建筑技术(2021年3期)2021-07-21
舰船科学技术(2021年12期)2021-03-29
建材发展导向(2019年7期)2019-11-29
当代陕西(2019年8期)2019-05-09
诗歌月刊(2014年8期)2015-04-21
筑路机械与施工机械化(2014年7期)2014-03-01
筑路机械与施工机械化(2014年3期)2014-03-01
