
六足仿生机器人设计与实现
2020-09-10 00:23韩凯
内燃机与配件 2020年15期
韩凯


摘要:为解决非结构环境下机器人地形适应性差、运动灵活性低等问题,本文基于仿生学原理设计开发了六足仿生机器人,以飞思卡尔K60处理器为主控芯片,完成了六足机器人的机械结构与控制系统设计,增设多种传感器模块,增强机器人的稳定性和自适应能力。
Abstract: In order to solve the problems of poor terrain adaptability and low motion flexibility of robots in unstructured environments, this article designed and developed a six-legged bionic robot based on the principle of bionics, using Freescale K60 processor as the main control chip to complete the mechanical of the six-legged robot Structure and control system design, add a variety of sensor modules to enhance the stability and adaptive ability of the robot.
關键词:单片机;仿生机器人;机械结构;寻迹
Key words: singlechip;bionic robot;mechanical structure;trace
0 引言
随着现代技术的不断发展,人类对于自然界的探索范围也日趋扩大,对于某些人类不能进入的地方只能依赖于机器人进行替代。
目前对于陆面机器人的研究成果主要体现在轮式、足式和履带式机器人上,轮式和履带式机器人在平面运动上稳定性高,应用较为广泛,不足之处在于不能应用于崎岖地形,适应能力较差。相比之下足式机器人具备冗余的机械结构,落足点可以任意离散分布在工作空间,可以适应复杂的非结构地形和不确定环境,提高机器人运动的可靠性。
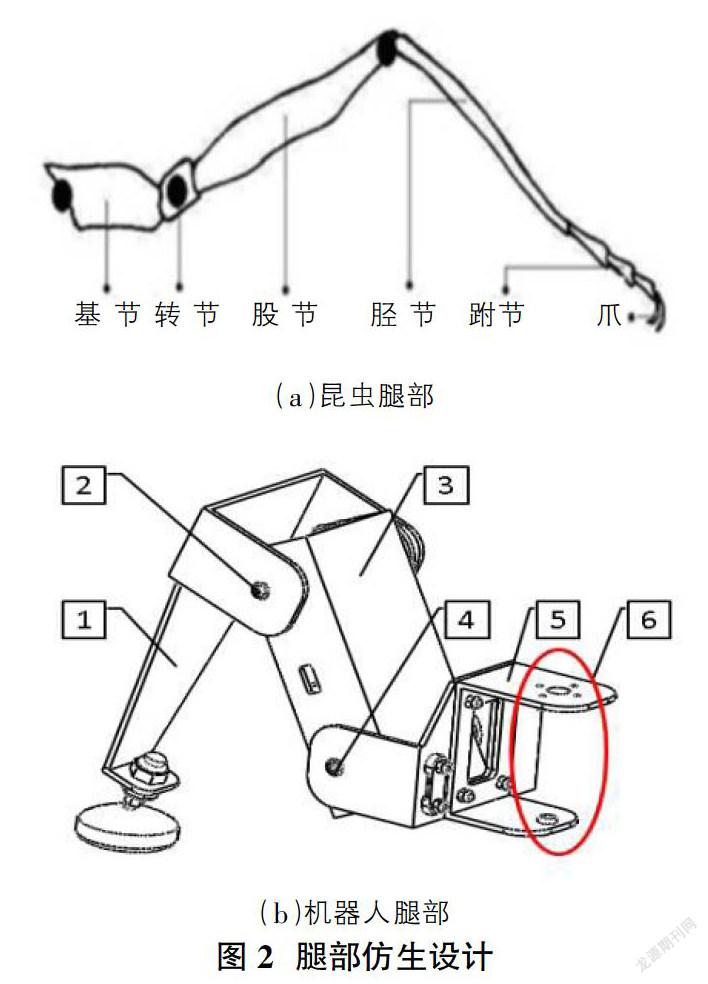
本文基于仿生学原理,以六足昆虫为仿生模型,分析其身体结构和运动机理,设计开发六足机器人适用于复杂地形的运动。
1 本体结构设计
以六足昆虫为仿生模型,要求机械结构本体对称且可靠性高,各机构零件连接可靠易装配,机器人运动自由度合理分配不存在干涉。
如图1所示,设计的机器人选用全铝框架材质,在保持轻量化的同时具备较高强度,整体为似菱形外形,六条腿均匀对称分布在身体两侧使机器人重心稳定,上顶机盖预留位置用于传感器的安装。
机器人腿部设计如图2所示,在机器人腿部2膝关节4髋关节和6根关节处安装舵机进行驱动,每条腿三个自由度,一共安装有18个舵机。
六足机器人关节的转动是靠运动副实现的,因此各个关节均设计有轴承。使用轴承可以减小各个关节转动时的阻力,从而减小机器人的功耗。
2 控制系统设计
控制系统要求稳定性强、实用性高、经济性好,满足机器人实时控制,预留控制接口以便于二次开发升级。
2.1 硬件设计
机器人的底层控制系统硬件设计如图3所示。
硬件部分主要包括最小系统模块、电源模块、传感器模块和运动控制模块。
最小系统中采用MK60DN512VLL10 为主控芯片,其运算速度快、外部接口丰富且能耗较低,能够全方位的满足六足机器人的控制要求。
电源模块主要为机器人供电,主要包括舵机部分供电和控制器供电,同时考虑电压需求和运动续航能力。本文设计采用12V、4200mah三芯锂电池为电源,同时设计降压模块,分别提供6V、5V、3.3V供电。
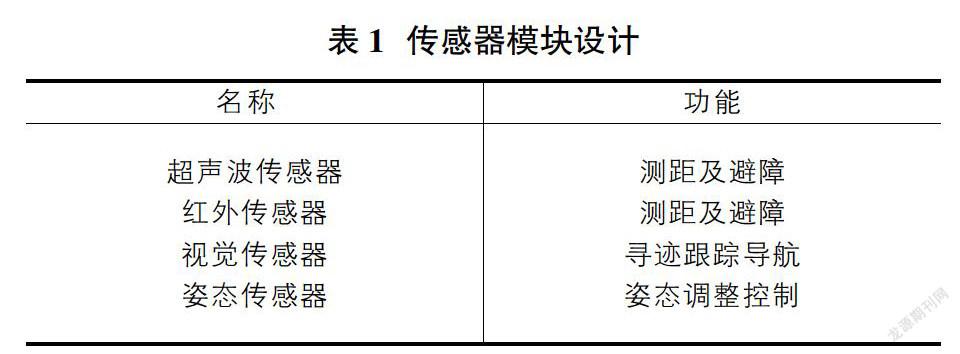
为了实时采集机器人周围环境信息并进行反馈控制,本文设计表1所示的传感器模块。
采用PWM信号对舵机进行控制,由于机器人共需18路PWM信号,因此选用两片pca9658芯片通过IIC通信来进行扩展,可同时控制32个舵机。
2.2 软件设计
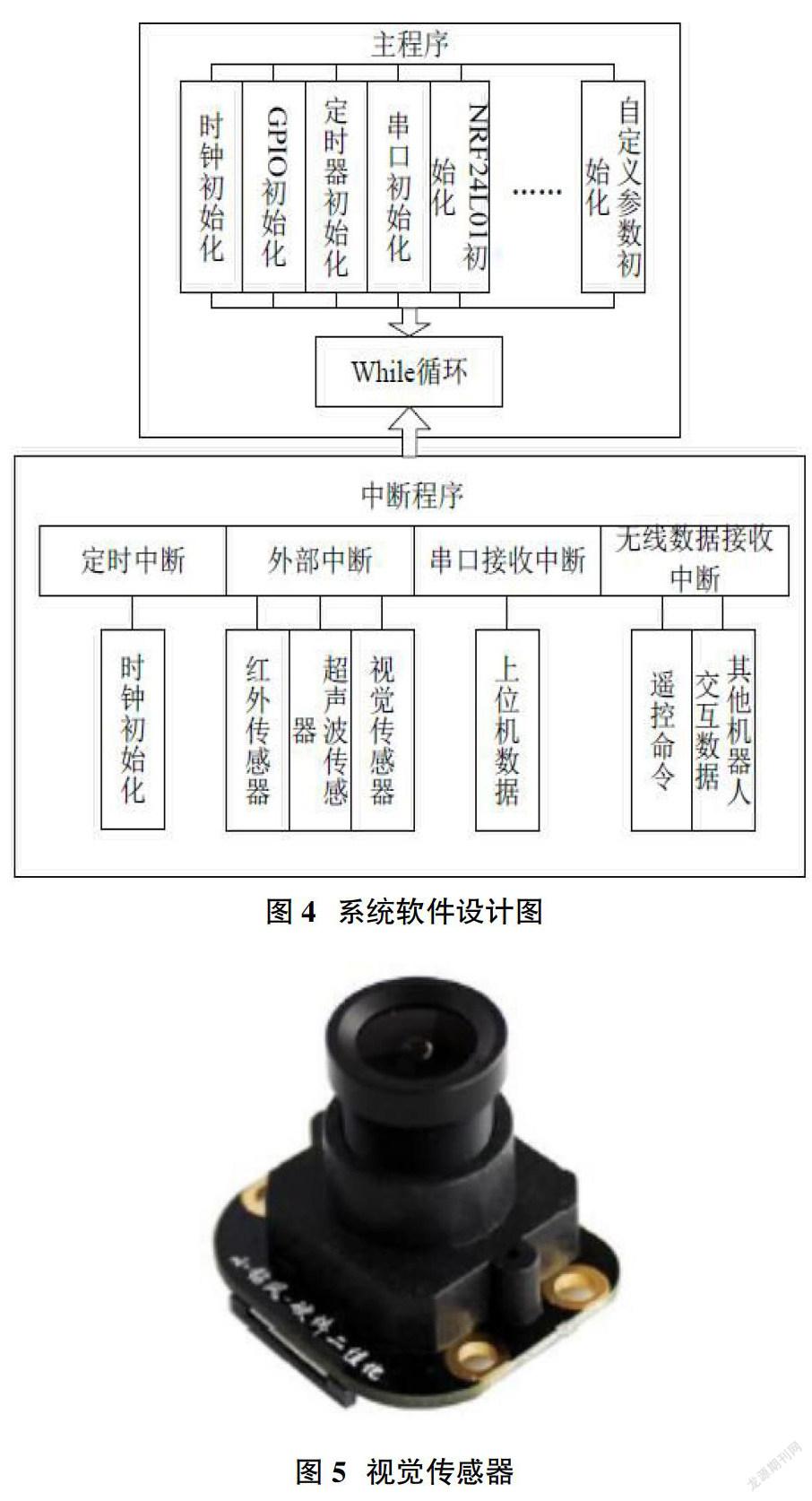
本文在IAR开发环境下按照分层思想进行了软件的编写,软件整体设计如图4所示。
以图5所示视觉传感器为例,器件型号为OV7725, 工作电压为DC3V,IIC 总线控制、8 位并行数据传输,图像输出帧率 0-150(帧/秒)软件可调,同时可以设置不同的分辨率。可直接硬件输出二值化图像,大大减轻单片机压力。
机器人在黑白跑道运动时,将左右两侧的黑色像素点取平均值,可以算出机器人偏差,由于机器人的转向角度是离散的,不需要复杂的PID控制。当其方向偏左,调用向右转向的动作组即可,方向偏右时同理。
while(1)
{
OV7725_Init(image_bin);
OV7725_get_img(); img_extract(image_bin,img,CAMERA_SIZE);
imgErr = imgProcess();
if(imgErr < -22)
motionCtr(left);
if(imgErr > 22)
motionCtr(right);
if(imgErr >= -22 && imgErr <= 22)
motionCtr(forward);
}
3 结论
本文基于仿生学原理,以六足昆虫为仿生模型,设计开发了六足机器人,完成了本体结构设计,并使用K60对六足机器人的控制系统进行软硬件设计,编写了相应的控制程序,增设传感器提高了机器人的适应能力。
参考文献:
[1]朱晓峰.六足仿生机器人单腿结构设计及其柔顺控制研究[D].哈尔滨工业大学,2010.
[2]陈瑞晓.仿生六足机器人机构设计及驱动系统研究[J].现代制造技术与装备,2019(12):100-102.
[3]赵涓涓.六足仿生机器人避障功能的设计与实现[J].机械管理开发,2019,34(11):11-13.
[4]姜奥博,胡聪,朱辉.仿生自主运动的六足机器人的设计与实现[J].科技资讯,2019,17(31):10-12.
[5]李俊敏.基于STM32的六足机器人运动控制系统研究[J].河南科技,2019(25):32-34.
猜你喜欢
科学与财富(2019年21期)2019-08-06
山东工业技术(2016年24期)2017-01-12
佛山陶瓷(2016年12期)2017-01-09
科技传播(2016年19期)2016-12-27
科技视界(2016年8期)2016-04-05
中国机械(2014年23期)2014-10-21
电子世界(2004年4期)2004-07-26
电子世界(2004年4期)2004-07-26
电子世界(2004年5期)2004-07-26
