
基于路况识别的分布式驱动无人驾驶汽车EPS控制研究
2020-09-10 22:23凌志勇
内燃机与配件 2020年16期
关键词:控制策略
凌志勇

摘要:一种自动驾驶汽车EPS控制系统及方法,以C-EPS为研究对象,系统包括上层控制模块和下层控制模块,主要是对分布式驱动结构进行设计、控制原理、整定方法、速度控制方法等进行研究;本设计能够实现不同助力效果,運用基于路况识别的分布式驱动技术使转向时灵活轻便,行驶稳定可靠。
关键词:分布式驱动;EPS;控制策略
1 研究背景
转向执行机构是实现线控转向(SBW)控制的执行系统,是SBW系统的核心硬件,它的响应特性、结构冗余安全性和寿命等都决定了SBW系统的性能。现有的用于无人驾驶的SBW系统的转向执行机构有很多种,但多为单电机驱动齿条的SBW执行机构,一旦转向执行电机发生故障,特别是在无人驾驶时,情况将不堪设想。因此研究一种无人驾驶汽车线控转向系统,提高无人驾驶汽车转向系统的响应特性和可靠性,延长转向执行电机的使用寿命是无人驾驶汽车的重要课题,具有现实意义。
2 分布式驱动结构设计
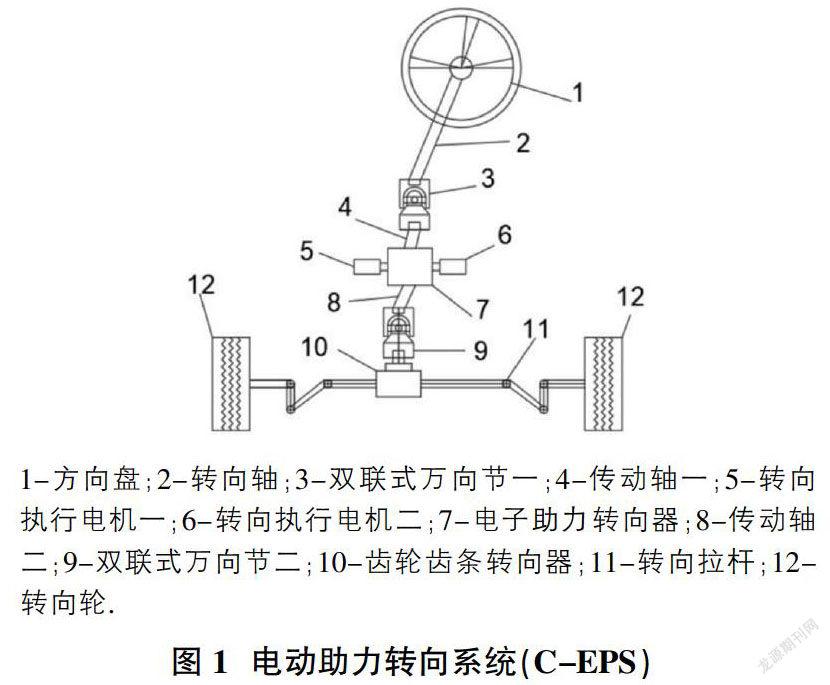
本文以转向轴式电动助力转向系统(C-EPS)为研究对象,其原理如图1所示,立足EPS控制策略与算法设计,结合汽车操纵稳定性仿真分析,形成基于分布式驱动EPS控制的自动驾驶汽车路况识别系统研究。
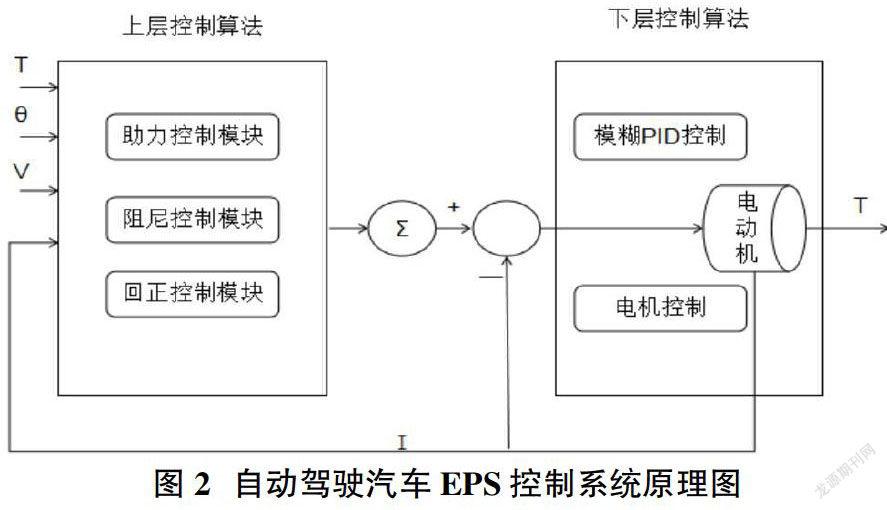
分布式汽车EPS控制系统控制原理图如图2所示。上层控制算法和下层控制算形成闭环控制,实现EPS控制。
3 EPS控制原理
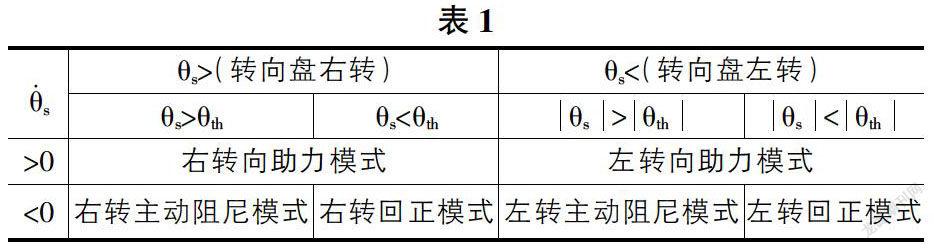
在图2中,EPS控制系统的上层控制模块,包括接收车速信号、转向盘力矩信号和转向盘角速度信号,经直线助力控制子模块输出目标助力电流,与实际工作电流的偏差经模糊PID控制子模块进行模糊PID调节后得到电机的控制电压,再通过脉宽调制技术对电动机的电流进行控制。模糊PID控制参数在线整定流程图如图3所示。
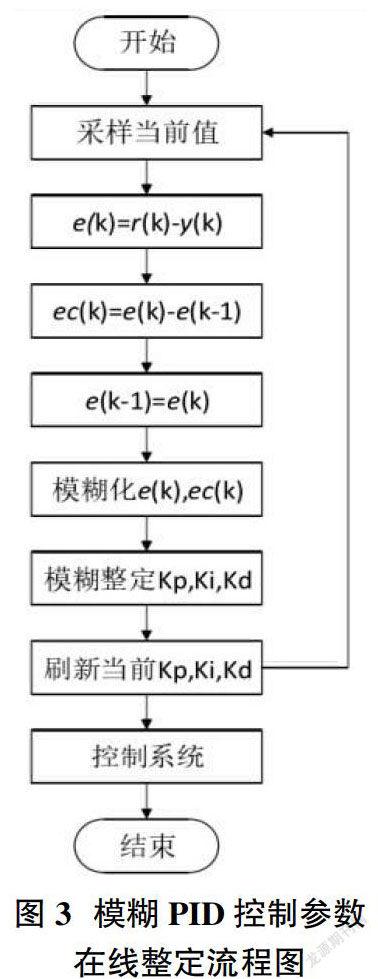
控制策略:EPS工作模式的判断算法为。
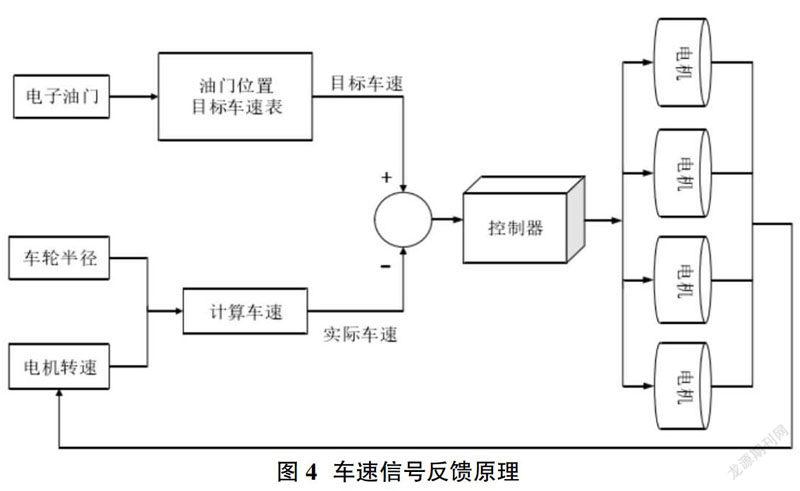
整车控制原理为:在无人驾驶模式时,转向执行电机一和转向执行电机二同时驱动电子助力转向器,电子助力转向器产生转向力矩传递给双联式万向节二,最后把力矩传递线给驱动齿轮齿条式转向器,完成转向动作。其车速信号、转向盘力矩信号和转向盘角速度信号控制过程如图4所示,EPS控制策略系统Simulink模型如图5所示。
4 结论
与现有技术相比,本设计的有益效果是:本设计将控制系统划分了上层控制模块和下层控制模块,上层控制模块划分了直线助力控制、阻尼控制、回正控制三种工作模式,下层控制模块在分析EPS助力模式以及助力电机电流控制算法的基础上,设计了模糊PID控制,并按照控制策略建立控制模型。本设计无人驾驶汽车的双电机同步驱动转向执行机构,因此,本设计既可解决无人驾驶汽车转向执行机构安全隐患的问题,又可以提高无人驾驶汽车转向执行机构的使用寿命,实现无人驾驶汽车转向的安全冗余。本无人驾驶汽车的双电机同步驱动转向执行机构,包括依次连接的方向盘、转向执行装置和转向轮装置,将上述三块结构形成一体,通过双电机同步带动电子助力转向器,可以减轻单个电机的负载,提高SBW系统转向执行电机的使用寿命。在无人驾驶的情况下,并且如果其中一个转向执行电机发生故障时,另一个转向执行电机可以驱动转向执行机构,提高了无人驾驶汽车线控转向系统的安全性和稳定性。
参考文献:
[1]胡金芳,颜春辉,赵林峰,梁修天,谢有浩.分布式驱动电动汽车转向工况转矩分配控制研究[J/OL].中国公路学报:1-13[2020-06-03].http://kns.cnki.net/kcms/detail/61.1313.U.20200602.0907.002.html.
[2]张利鹏,袁心茂,彭畇傲,李韶华.分布式驱动电动汽车回馈制动失效的液压补偿控制[J/OL].中国公路学报:1-17[2020-06-03].http://kns.cnki.net/kcms/detail/61.1313.U.20200408.1631.016.html.
[3]张志达,郑玲,吴行,乔旭强,李以农.基于鲁棒自适应UKF的分布式电动汽车状态估计[J/OL].中国科学:技术科学:1-13[2020-06-03].http://kns.cnki.net/kcms/detail/11.5844.TH.20200403.1616.014.html.
[4]梁志峰,夏俊荣,孙檬檬,周昶.数据驱动的配电网分布式光伏承载力评估技术研究[J/OL].电网技术:1-11[2020-06-03].https://doi.org/10.13335/j.1000-3673.pst.2019.2599.
[5]金贤建,杨俊朋,殷国栋,王金湘,陈南,卢彦博.分布式驱动电动汽车双无迹卡尔曼滤波状态参数联合观测[J/OL].机械工程学报:1-10[2020-06-03].http://kns.cnki.net/kcms/detail/11.2187.TH.20200324.1526.042.html.
[6]郭烈,葛平淑,许林娜,林肖.转向工况下的分布式电动汽车稳定性控制[J].华南理工大学学报(自然科学版),2020,48(03):100-107.
[7]杨璐.分布式驱动电动汽车复合制动控制研究[J].时代汽车,2020(05):65-67.
[8]张新锋,朱明,王奥特.分布式驱动电动汽车横摆稳定性控制研究[J].重庆理工大学学报(自然科学),2020,34(02):24-31.
[9]葛磊,权龙.分布式变转速容积驱动液压挖掘机控制原理及其特性研究[J].机械工程学报,2020,56(03):72.
[10]余卓平,史彪飞,熊璐,韩伟.某分布式驱动电动汽车复合制动策略设计[J].汽车技术,2020(02):12-17.
[11]张勇,王成玲,李玉,刘富强.分布式独立驱动车辆复合转向匹配特性研究[J].西华大学学报(自然科学版),2020,39(01):77-84.
[12]裴晓飞,刘志厅,陈祯福,陈可际,杨波.分布式驱动电动汽车的差速转向控制及其适用性[J].汽车安全与节能学报,2019,10(04):423-432.
[13]赵德阳,李刚.分布式轮边驱动电动汽车电机托臂设计与分析[J].汽车实用技术,2019(23):30-32.
[14]张琳.分布式驱动电动汽车状态估计与力矩矢量控制研究[D].吉林大学,2019.
[15]徐坤,骆媛媛,杨影,徐国卿.分布式电驱动车辆状态感知与控制研究综述[J].机械工程学报,2019,55(22):60-79.
猜你喜欢
交通科技与管理(2022年9期)2022-05-24
中国典型病例大全(2022年7期)2022-04-22
内燃机与配件(2022年2期)2022-01-17
电子乐园·上旬刊(2021年7期)2021-07-19
电机与控制学报(2018年9期)2018-05-14
电子技术与软件工程(2016年24期)2017-02-23
电子技术与软件工程(2016年22期)2016-12-26
商场现代化(2016年29期)2016-12-23
中国经贸(2016年20期)2016-12-20
